A-GPS辅助定位技术研究
2016-09-07明德祥陈建云
张 晨, 明德祥, 陈建云, 杨 俊
(国防科技大学机 电工程与自动化学院,长沙 410073)
A-GPS辅助定位技术研究
张晨, 明德祥, 陈建云, 杨俊
(国防科技大学机 电工程与自动化学院,长沙410073)
A-GPS定位技术是结合地面网络资源和传统卫星导航定位,利用蜂窝网基站代为传送卫星星历等信息,提高接收机对卫星信号的捕获概率,缩短接收机首次定位时间;在研究A-GPS对接收机辅助定位技术过程中,重点分析了A-GPS对接收机信号捕获的辅助原理,分析表明,基于A-GPS的信号捕获时间可缩短为传统接收机的1/40;利用GNSS导航信号模拟器和蜂窝网基站模拟器组建了室内A-GPS模拟测试系统,通过模拟基站的信令方式将参考时间、多普勒频移预测值以及星历或历书等辅助数据传输给用户接收机,实现了辅助数据在信令通道的编码和传输。
辅助导航;首次定位时间;蜂窝网;信令
0 引言
随着导航技术的迅速发展,GPS应用越发重要和多样化,用户不仅想在室外拥有良好的定位信号,而且也希望在处于建筑物林立的街道中、高架桥下,甚至是室内等弱信号环境下能得到良好的GPS信号,基于此出现了辅助GPS(Assisted GPS)[1-3]的构想和技术,A-GPS结合地面网络资源和传统卫星定位,利用蜂窝网模拟基站代为传送卫星星历等信息,缩减用户接收机获取卫星信号的延迟时间。
首次定位时间(TTFF)是指接收机启动后直至给出第一个定位结果所需的时间,影响它的主要两个因素是对多个卫星信号捕获的快慢和获取有效星历的时间长短[4]。A-GPS辅助技术利用地面网络资源,提前将辅助信息传输到接收机上,帮助接收机实现快速信号捕获和定位。本文着重分析了A-GPS辅助信息在接收机信号捕获时多普勒频移的预测计算,同时构建了一套室内A-GPS模拟测试系统,实现了辅助信息在GSM网络上的传输。
1 A-GPS定位辅助原理
对于一个没有任何先验信息的用户接收机,在实现定位之前,必须经过信号捕获和下载解码星历或历书数据。所以,A-GPS辅助的作用主要有两个方面,一是向接收机提供星历或历书数据,这样接收机就不必解码广播星历或历书;另一方面由于辅助信息中包括了卫星轨道和参考时间的先验信息,因此可以计算出预期的多普勒频移和码延迟,再将预测到的多普勒频移和码延迟传送到接收机,从而可以缩小接收机信号捕获的搜索空间,辅助接收机缩短首次定位时间[5]。
1.1GPS接收机信号捕获分析
在GPS接收机实现定位之前,必须先捕获卫星的信号。而在捕获每个卫星信号之前,首先应该找到卫星的准确频率和精确地码延迟。尽管每颗GPS卫星发射频率相同的信号,但是考虑到接收机与卫星的运动所引起的多普勒频移,接收信号的频率是不同的。如果接收机没有这些频率变化的先验知识,就必须扫描所有可能的频率。然而,即使GPS接收机具有正确的频率,还必须给相关器找到正确的延迟码以产生相关峰。这使得GPS接收机对每颗卫星有一个二维扫描空间,即频率/码延迟扫描空间。
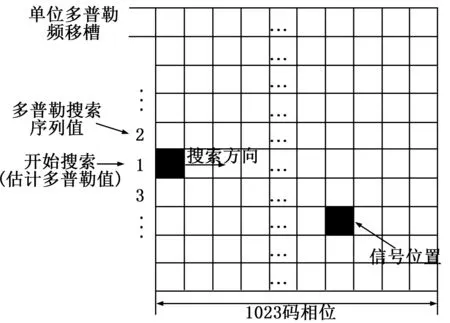
图1 二维搜索空间图
图1中横坐标为码相位,纵坐标为多普勒频槽。
典型的搜索方式有串行搜索和并行搜索[6],串行搜索就是对载波和伪码所有可能值进行依次搜索的方法。并行搜索包括基于硬件的时域并行搜索和基于频域的数字信号处理并行搜索,前者是同时采用多个独立的码相关器使载波串行、码相位并行的相关搜索策略,后者是通过快速傅里叶变换(FFT)实现频率或时延的一次搜索,又分为码并行搜索和频率并行搜索,不同的搜索方式对应的计算量和实现快慢程度也不相同。
假如接收机采用的是码并行FFT快速捕获策略,它的一般原理是将卫星信号搜索过程的时域相关运算转换到频域的相乘运算,并同时得到每个频槽内所有码相位的最大相关值,相比时域内串行搜索策略大大降低了卫星信号的捕获时间。但是在没有任何先验信息情况下,由于多普勒效应产生的频偏,此法在搜索频槽时仍占用了一定时间。
GPS多普勒频移主要由卫星和接收机相对运动产生,卫星与接收机处于同一水平面时,卫星运动相对于接收机的速率最大,此时最大值vdmax为:
(1)
式中,vs是卫星的速率,re是地球平均半径6 368 km,rs卫星的轨道半径26 560 km。
则卫星运动引起的最大多普勒频移fdmax为
(2)
式中,fr是GPS卫星的L1频率(1 575.42 MHz),c是光速,vdmax是卫星相对于接收机的最大速率。
当接收机静止时,随着接收机捕获的卫星仰角弧度从0到π/2 的变化,当卫星运动越过天顶之后,卫星仰角弧度从π/2到0变化,故而由卫星运动引起的多普勒变化范围为-4.9~4.9 kHz。
现实中,用户接收机的位置不是一成不变的,接收机的运动也会引起多普勒频移,假设接收机的最大运动速度为卫星指向接收机的径向速度,则卫星运动和接收机运动所引起的多普勒偏移的变化范围应在±10 kHz。若没有先验信息,则捕获过程中需完成-10~10 kHz的多普勒频率范围搜索。
针对多普勒频率搜索和码延迟搜索二维搜索方向,则整个二维范围进行搜索所需时间最多为:
(3)
式中,T 为时域的搜索范围;F 为多普勒频偏的搜索范围;δt为码延迟的搜索步长;δfd为频率的搜索步长;Rs为平均搜索速率(单元数/s),其表达式为:
(4)
式中,C/N0为接收机输入端的有效信噪比,β为漏检概率。
因为采用码并行FFT捕获算法,则仅对频率进行一维搜索,搜索时间变为:
(5)
假设在500 Hz的频槽内搜索,C/N0=40 dB·Hz即C/N0=104Hz,β=0.1,根据上式可以得到Rs=900,代入上式可得Ts≈44.4 ms。
如果将频率搜索过程中的多普勒频移预测到,并将该预测值发送给接收机,则可以将频率搜索的时间的缩短,A-GPS辅助可以根据得到的信息计算出预期的多普勒频移。
1.2A-GPS辅助信号捕获研究
导航卫星与用户接收机之间相对运动引起的多普勒频移与卫星的位置、速度以及接收机的位置、速度有关。因此,当上述的4个信息确定之后,卫星与接收机之间所引起的多普勒频偏就能大致确定下来,从而减少卫星捕获时的频率搜索范围,减少卫星信号的捕获时间。
A-GPS辅助信息中包含卫星的星历或历书信息,通过这些信息可以计算卫星当前时刻的位置与速度[2]。
利用GPS星历参数并通过坐标转化公式便可以得到WGS-84地心地固直角坐标系(XT,YT,ZT)中的坐标(xk,yk,zk)。
(6)


(7)

(8)
若接收机运动速度为vu,卫星发射信号频率为fr,则由接收机与卫星相对运动引起的多普勒频移就可以确定,如公式(9)。
(9)
本文中采用2015年1月1日实测GPS L1C/A频点得到的多普勒频移值,预测多普勒频移是由同时间内实测得到的星历信息采用上述方法预测得到。为了A-GPS辅助的真实情况,预测中接收机使用位置与实测点的位置相差1km,结果对照如表1所示,预测与实测多普勒频移的误差如图2。

表1 预测与实测多普勒频移对照表

图2 预测多普勒频移误差图
从图2可以看到,预测出的多普勒频移与实测得到数据相差无几,接收机根据预测的多普勒频移,可以将频率搜索压缩到一次搜索,伪码利用FFT并行搜索,则信号的捕获搜索时间必然小于1 ms,相比传统信号捕获策略缩短约为1/40,从而减少了接收机的首次定位时间。下文将从室内A-GPS模拟的角度出发,研究如何将辅助信息传送到接收机端。
2 A-GPS辅助定位实现
2.1A-GPS模拟系统构建
A-GPS模拟系统主要的硬件架构国防科学与技术大学机电工程与自动化学院研制的GNSS导航信号模拟器和安捷伦8960系列10无线通信综合测试仪E5515C,E5515C内嵌安捷伦的E6701G 综合网络仿真器,它具有真实数据流的实际网络仿真和互联网连通性。GNSS导航信号模拟器仿真GPS导航信号,8960无线通信综合测试仪用来仿真蜂窝网基站,高性能服务器控制上述两者,从而实现MSB(mobile station based)和MSA(mobile station assisted)的A-GPS辅助模拟系统。系统架构如图3所示。
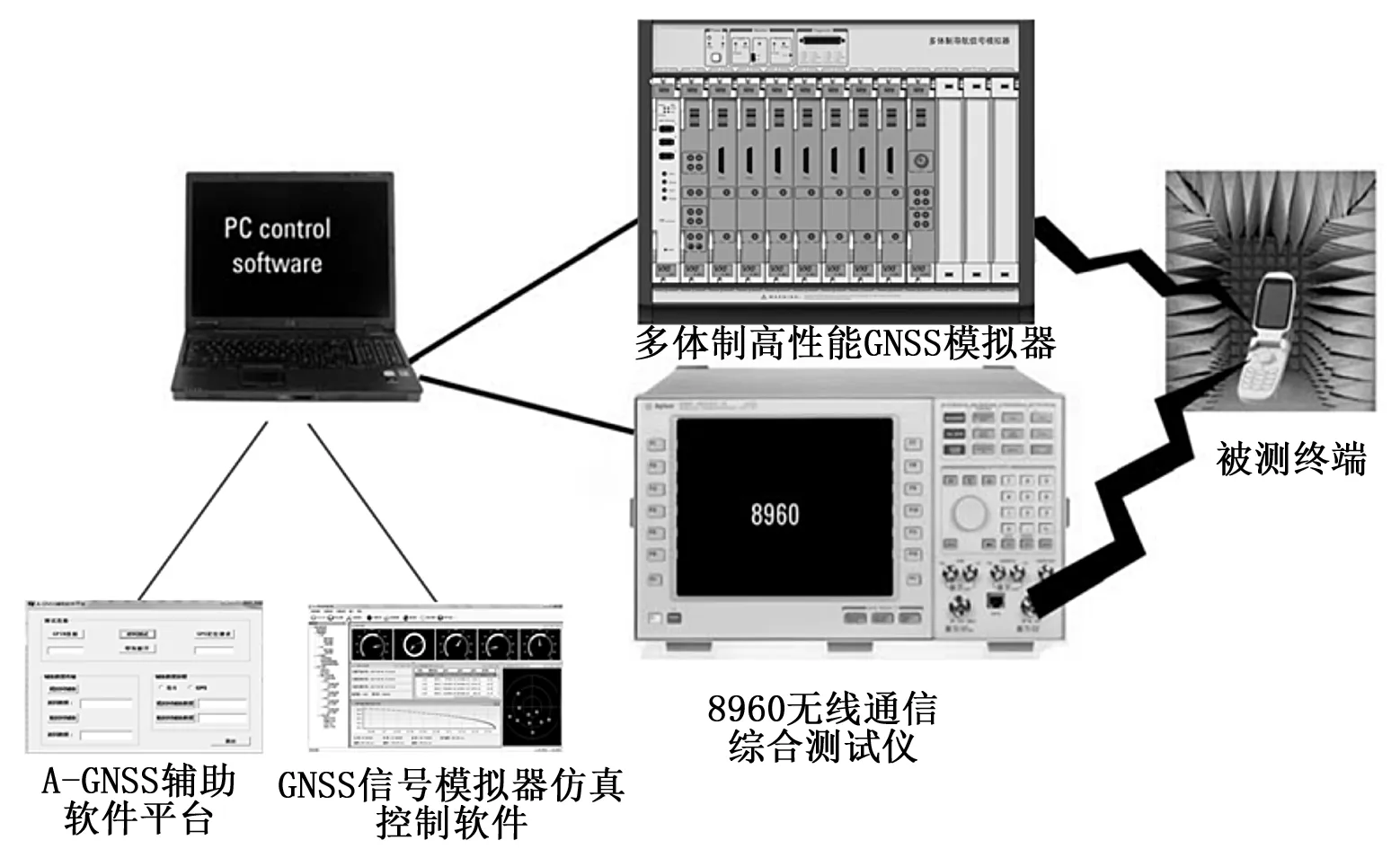
图3 A-GPS模拟系统实物连接图
在整个系统中,服务器装有两个终端控制软件,首先是GNSS卫星导航信号模拟器控制软件,控制模拟器仿真实际的GPS系统。另一个为8960无线通信综合测试仪控制软件,该软件有两个功能,一是获取从导航模拟器控制软件获取星历或历书等辅助信息,并联合接收机仿真位置信息计算出预测的多普勒频移,二是控制8960将该辅助信息下发到接收机终端上。当用户接收机接受到辅助信息后,再与卫星导航信号模拟器正常通信,进行定位。本文主要研究A-GPS辅助信息通过GSM网络利用信令控制方式下发到接收机,完成辅助功能。
2.2A-GPS辅助信息传输实现
A-GPS辅助信息通过移动网络GSM网络传输到终端,基于的协议标准是RRLP(Radio Resource LCS Protocol,无线资源 LCS 协议)协议。RRLP是空中接口(GSM)中用到的最重要的定位服务规范,它定义了定位服务中工作模式和定位技术中的相关协议。RRLP 可以支持 E-OTD 和 A-GPS 两种定位技术。RRLP支持A-GPS的MSA定位模式和MSB定位模式,并定义了各自相应的辅助数据[7]。
每条 RRLP 消息都包含一个参考数字(reference number),并分为测量位置请求、测量位置响应、辅助数据、辅助数据确认、协议错误 5 种类型。RRLP的辅助信息传输协议流程是服务终端向接收机传送辅助数据,接收机收到后向服务终端返回确认消息,如果出错,则返回错误消息。如图4所示。

图4 A-GPS辅助信息传输流程图
每条RRLP信息需要进行通信编码才可以通过GSM网络传送到接收机终端,RRLP协议是用ASN.1进行描述的,ASN.1是Abstract Syntax Notation One的缩写,即抽象语法标记。信息编码规则是PER(Packed Encoding Rule,压缩编码规则),该编码规则可以节省网络空间,编码效率高。
A-GPS信息编码流程首先将由ASN.1描述的RRLP数据结构转化为C/C++语言描述,然后将其输入由PER编码规则的函数完成编码[8]。
在编码实现的过程,本文使用了OSS公司的一款ASN.1的编码软件,该软件可以将ASN.1语言转变成C语言表示方法,并且A-GPS辅助信息赋值可以图形化表示。上位机软件将参考时间,星历以及预测的多普勒频移等辅助信息通过编码传输到接收机,时间和星历信息是通过模拟器仿真软件得到,接收机位置信息是通过模拟器仿真场景中设定位置得到,多普勒预测值由上位机完成。编码得到是一串16进制的数据,图7以星历数据编码为例,编码得到‘651B4041EB00C85B2071C7…’。
利用8960控制软件将编码得到的数据通过8960发送到接收机,接收机终端收到辅助信息后,会返给上位机一串16进制的数据,该数据用来判断发送的数据是否出现错误。在实验中,返回的数据码是“66”,利用OSS软件将该数据解码,解码得到结果:数据回复并无错误,则证明辅助信息发送成功。
3 结论
本文就A-GPS定位终端测试技术展开研究,分析了A-GPS定位辅助原理中的信号捕获辅助,实现了A-GPS辅助定位室内模拟测试。通过A-GPS辅助可以得到多普勒频移的预测值,辅助接收机缩短了信号捕获的时间,进而缩短了接收机的首次定位时间。构建了室内A-GPS模拟测试系统,实现了将辅助信息通过信令方式传输到接收机终端,这对今后继续开展A-GNSS室内模拟测试系统有着重要的奠基作用。
[1]范迪格伦. 辅助GPS原理与应用[M].北京:电子工业出版社, 2013.
[2] 王新晖, 胡福乔. GpsOne——混合定位系统展望[J]. 计算机测量与控制, 2004, 12(7):610-612.
[3] 史岩, 朱涛, 傅军. 基于WPS/GPS/MIMU组合的无缝定位技术研究[J]. 计算机测量与控制, 2014, 22(10).
[4] 谢钢. GPS 原理与接收机设计[M].北京:电子工业出版社, 2009.
[5] 张光华. 全球导航卫星系统辅助与增强定位技术研究[D]. 哈尔滨:哈尔滨工业大学, 2013.
[6] 李献斌, 王跃科, 陈建云. 导航星座星间链路信号捕获搜索策略研究[J]. 宇航学报, 2014, 35(8):946-952.
[7] 郭锐, 周丰. AGPS全球定位系统中辅助信息传输协议RRLP的研究[J]. 信息通信, 2006, 19(5):19-21.
[8] 李永亮, 葛维春, 王芝茗. IEC61850通讯标准中的编码规范ASN.1[J].电力系统保护与控制, 2008,36(22):66-71.
A-GPS Positioning Terminal Testing Technology Research
Zhang Chen,Ming Dexiang,Chen Jianyun,Yang Jun
(School of Mechatronics Engineering and Automation, National University of Defense Technology, Changsha410073, China)
A-GPS positioning technology is a combination of terrestrial network resources and traditional satellite navigation. Using cellular network base station and transmitting the auxiliary information to shorten time to first fix of the receiver and reduce the user's dependence on the satellite. In the study of A-GPS receiver assisted positioning technology process. Focuses on how A-GPS information assist the receiver signal acquisition. Then, using GNSS navigation signal simulator and cellular base station simulator to set up indoor A-GPS simulation tests system and studying on transmitting reference time, Doppler shift predicted values and ephemeris or almanac and other assisted information to the receiver, which implements accessibility for data encoding and transmission of signaling channels.
A-GPS; time to first fix; cellular network; signaling
2015-07-08;
2015-08-19。
国家863计划(2012AA121804)。
张晨(1989-),男,河北邯郸人,在读硕士研究生,主要从事A-GNSS室内模拟测试系统方向的研究。
1671-4598(2016)01-0216-03
10.16526/j.cnki.11-4762/tp.2016.01.059
TP3
A
