基于激光扫描的接触网几何参数检测方法研究
2016-09-07余朝刚
张 东,余朝刚
(上海工程技术大学 城市轨道交通学院,上海 201620)
基于激光扫描的接触网几何参数检测方法研究
张东,余朝刚
(上海工程技术大学 城市轨道交通学院,上海201620)
针对当前电气化铁路接触网几何参数日常检测的需求,提出了一种基于激光扫描的接触网几何参数检测方法,即结合激光扫描仪、光电编码器和工控机等硬件设备进行编程处理以实现相关几何参数的非接触式采集、采样点定位和数据处理以获得接触网的各个几何参数,经试验该方法能有效的提高接触网几何参数检测精度,测量精度达到±3 mm,具有实际意义。
接触网几何参数;激光扫描;光电编码器;非接触式检测
0 引言
接触网是电气化铁路中重要的供电设备,列车运行时通过受电弓与接触网滑动接触,向车辆牵引系统及其附属设备供电。接触网的几何参数直接影响着列车的行车安全和接触网及受电弓的使用寿命。为保证铁路系统的正常运营,需对接触网各项几何参数进行周期性检测,保证行车安全[1]。
目前国内在接触网参数检测方面的测量方法主要有两种:接触式检测和非接触式检测。接触式检测通常是在受电弓滑条或弓架上安装传感器与高压接触线直接接触进行检测,这样在检测过程中就存在很大的安全隐患,而且测量精度较低。非接触式测量常用CCD成像检测法,它是利用安装在列车顶部的高速摄像机对接触网进行拍摄,通过成像位置计算出接触线相对摄像机的高度和横向偏移,从而得到接触线的导高和拉出值等几何参数。这种方法因采集来的图像包含过多冗余信息及算法过于复杂而影响系统稳定性[2]。
本文提出采用激光扫描仪对接触网的几何参数进行数据采集,利用光电编码器得到行驶路程信息来对数据进行定位,并通过对数据的过滤、处理并计算得到接触网的各个几何参数。
1 测量原理分析
1.1检测项目及意义
本系统主要是对接触网的导高和拉出值这两个参数进行检测。导线高度是指接触导线底端到两轨道水平面的垂直距离,导高的大小要限定在一个合理的范围内,若导高过大则受电弓易与接触网脱离发生离线事故,导高过小时则容易发生钻弓事故。拉出值是指接触导线定位点到两轨道中心线的水平距离,该参数表明了接触导线在受电弓滑板上来回滑动的距离范围,若拉出值过大,在恶劣天气(大风天气)情况条件下,接触导线容易超出受电弓的工作范围,发生钻弓事故,而拉出值过小时,接触导线就不能达到均匀磨耗滑板的目的,从而缩短受电弓滑板的使用寿命[3]。
1.2测量原理
激光扫描仪作为现场检测设备利用了激光相位测距原理,将测距装置与光学转动装置合成为激光扫描系统。相位测距方法是通过测量调制光波往返于扫描仪与目标点产生的相位延迟,间接测量调制光波运行的时间,测量出距离,角度测量是通过角位移传感器完成的[4]。
测量原理如图1所示,O为激光发射点,扫描仪通过均匀旋转棱镜使激光脉冲完成对某一定点截面的扫描,点A点B为扫描到的两条轨道的位置,激光测距装置测量出激光发射点到接触导线的距离OD,用d表示,角位移传感器则测量出从扫描中心点到接触导线棱镜旋转的角度θ(规定激光束与轨面垂直时θ=0),OE为激光发射点到轨道中心线C的距离,OF为激光发射点到轨道面AB的距离。
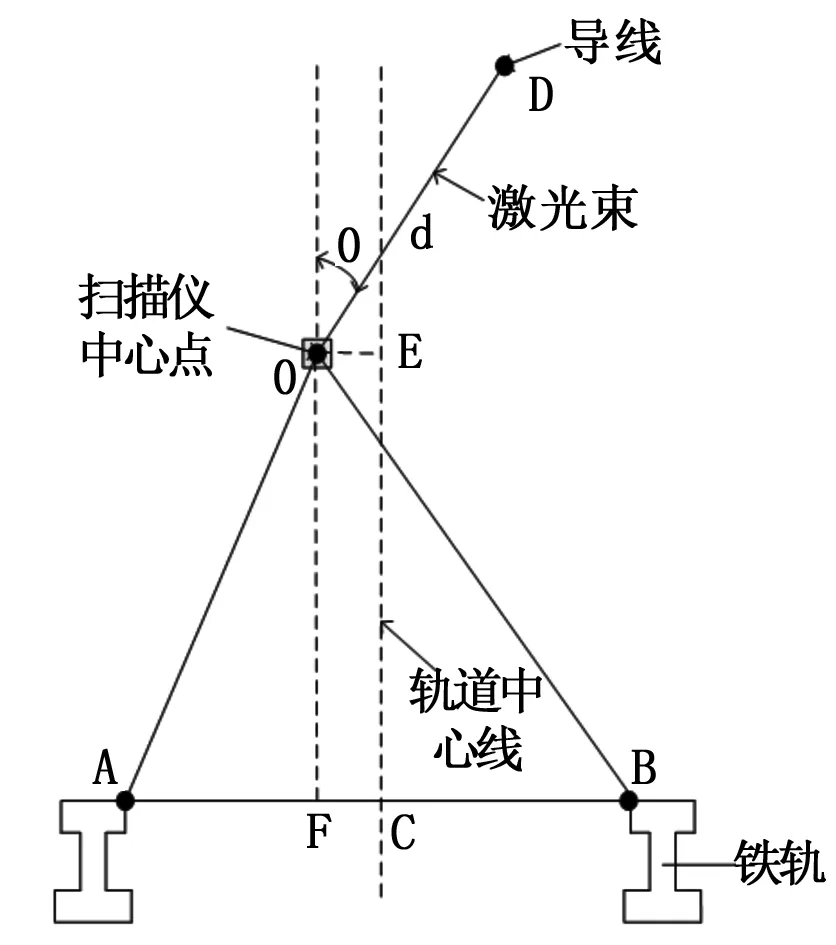
图1 测量原理图
导高H,即从接触线上D点到轨道面AB的距离:

(1)
拉出值L,即接触线到两轨道中心(C点)的距离:

(2)
其中:OE、OF为常数,由检测系统的外形尺寸确定。当接触线位于扫描仪的左侧时L=d×sinθ+OE。
激光对接触导线进行扫描时,对输出距离信息进行高频率采样,扫描一周最多可以采样17 352个点(采样点个数可以通过调节扫描仪分辨率来改变)。接触导线的最大高度为6 500 mm,检测装置离轨面垂直距离大约为1 700 mm,则以4 800 mm为半径画一个圆,圆的周长为2πR=30 144 mm,再等间距采样17 352次,采样间隔为1.74 mm,在这个采样间隔完全可以使激光扫描接触导线时采样一次以上,保证激光采样距离d的正确性。
2 检测系统的设计
2.1系统的硬件设计
考虑到户外现场作业的恶劣环境因素,本系统采用了成熟的工业级模块和测量器件,系统的硬件设备组成如图2所示。该系统设备由激光扫描仪、定位传感器件(光电编码器)、计算机实时同步系统、操纵显示面板以及电源等部分组成。

图2 检测系统硬件设备结构设计图
激光扫描仪选用FARO Focus 3D激光扫描仪,其扫描距离范围为0.6~120 m,扫描最大频率为97.6万点/秒,系统距离误差达到±2 mm,其配备触摸屏,可以方便直观地设置扫描仪的扫描模式和相关的一些参数。
光电编码器选用上海德晶光电公司生产的HTE系列双通道增量式光电编码器,它是直接利用光电转换原理输出A、B两路方波脉冲信号。车轴每旋转一圈编码器会输出1 024个方波脉冲,根据记录到的编码器的脉冲数以及车轮的直径就可以推算出车子行走的距离。
计算机实时同步系统主要由美国国家仪器(NI)公司生产的小型工业计算机以及数字采集模块组成,工控机采用型号NI PXI-1031DC的4槽机箱,机身内部配有NI PXI-8110 2.26 GHz四核嵌入式处理器主要完成数据处理存储工作,而数字采集模块采用型号为NI PXI-6602数字采集卡,该采集卡拥有多个计数器/定时器和与TTL/CMOS兼容的数字I/O引脚,可执行各种诸如事件计数、脉冲宽度测试、脉冲序列生成以及频率测量等任务,在这里主要完成移动位置数据采集工作。软件同样使用NI公司研发的LABVIEW开发环境编写实时同步程序完成扫描仪的2D数据与车体移动位置数据的同步。
2.2系统工作原理
系统工作原理如图3所示。首先将扫描仪设置成2D扫描模式,并设置好相关参数。之后通过操纵面板给扫描仪发送一个低电平信号使扫描仪开始扫描记录二维坐标数据。每当反射棱镜旋转到0°即镜面正对扫描仪底部时,扫描仪会输出一个低电平方波脉冲信号,计算机同步系统将该信号作为同步标记信号。
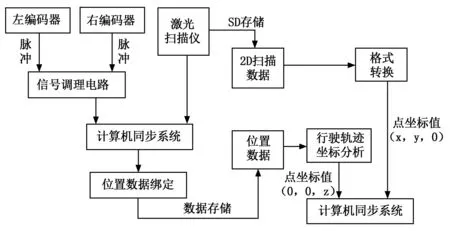
图3 系统工作原理图
计算机同步系统在小车移动过程中通过每个编码器发出的A、B两相脉冲实时判断车轮的转动方向并进行加减计数。当计算机同步系统接收到扫描仪输出的脉冲时,以此脉冲信号作为同步标记信号,将此时车辆的位置数据与该同步信号绑定形成一个标记文本并进行存储供线下处理。
3 数据处理
采用法如公司的FARO SCENE软件,通过数据格式转换将FARO格式(法如fls格式)转化为文本格式(xyz格式),扫描数据格式如图4所示。Column为扫描仪扫描圈数,row为每一圈上点个数,X、Y、Z为每一点的坐标位置。
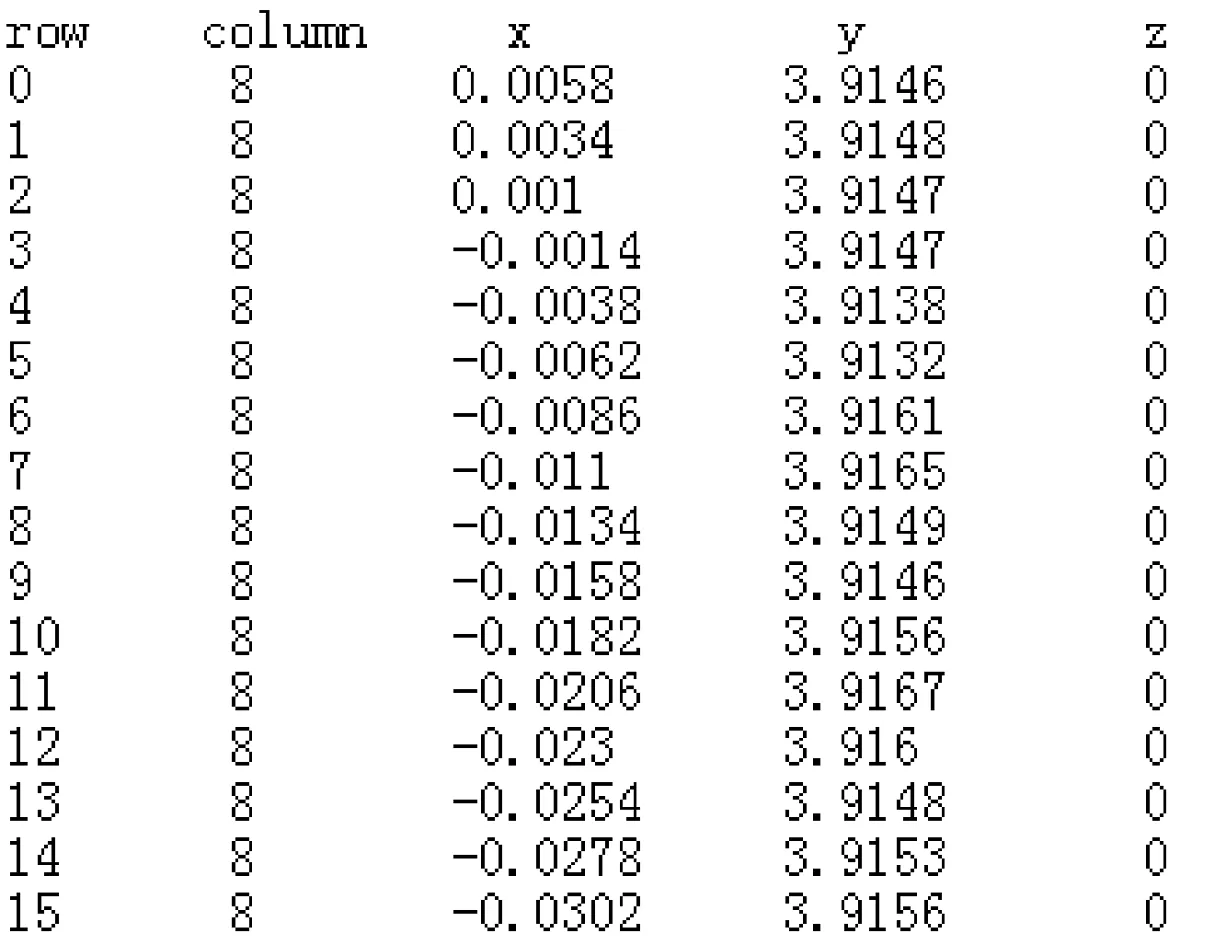
图4 扫描数据存储
3.1数据滤波
根据得到的3D空间坐标数据,选取其中的一圈数据进行分析。如图5所示为隧道内激光扫描一圈的轮廓曲线图,为了减少数据传输、提高程序处理速度及系统的运行效率,考虑到接触线拉出值的测量范围,设定扫描仪的扫描范围为30°,即此时测量系统的角度测量范围为-15°~15°,图6所示为扫描范围30°的轮廓曲线图。
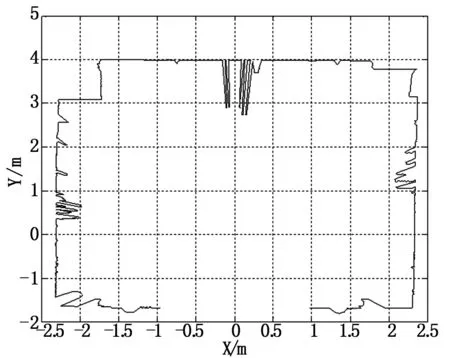
图5 激光扫描轮廓曲线

图6 扫描范围30°的轮廓曲线图
在实际的测量过程中通常存在多种因素(如隧道内其它非目标物体的遮挡、车辆振动等)的影响,测得数据通常不是最理想结果。因此首先需要对数据进行滤波处理,过滤掉一些有明显粗差的数据和一些无效数据,从而得到目标物体信息的最佳值。本文选用差分方法进行数据滤波,通过MATLAB软件进行编程来实现滤波算法。
函数的前向差分通常简称为函数的差分,对于函数f(x),如果:

(3)
则称Δf(x)为函数f(x)的一阶差分,简称为差分[5]。
将扫描得到的原始二维数据转化为极坐标表示,形成一个二维数组,包括扫描仪到接触线的距离R和转过角度θ,数据滤波的目标函数是Rn,n表示扫描点的个数,由差分定义得到距离的差分表达式为:ΔRn=R(n+1)-R(n),运算结果如图7所示。

图7 一阶差分与原始数据对比图
由图7可以看出,扫描到目标物附近时,原始数据曲线中会出现一个极小值,差分曲线在此极小值的对应位置左右有2个尖点,并且左边的值是小于0的,而右边的值则大于0,中间部位值近似为0,符合这些条件的尖点则认为是目标物的数据边界。因此,滤波处理的过程可分为如下步骤:
1)过滤背景噪声数据。设定阈值H,将ΔRn与H比较,将背景噪声数据滤除并存储大于H的数据点,得到了差分曲线中的尖点数据。
2)确定原始曲线目标边界点的位置。逐一比较相邻的尖点,并记录满足ΔRn-1<0且ΔRn>0成立的n值,并且根据n得数值确定目标物的边界点位置。
3)根据上一步得到的数据判断其是否合理。因接触线的直径一定,扫描所得到的点的个数一定,因此可根据扫描到的目标点的个数判断其数据合理性。
通过分析接触悬挂的类型和接触导线的位置,取阈值H=0.5,差分曲线中所有大于此值的点全部认为是随机波动而滤除,过滤后的数据点如图8所示。
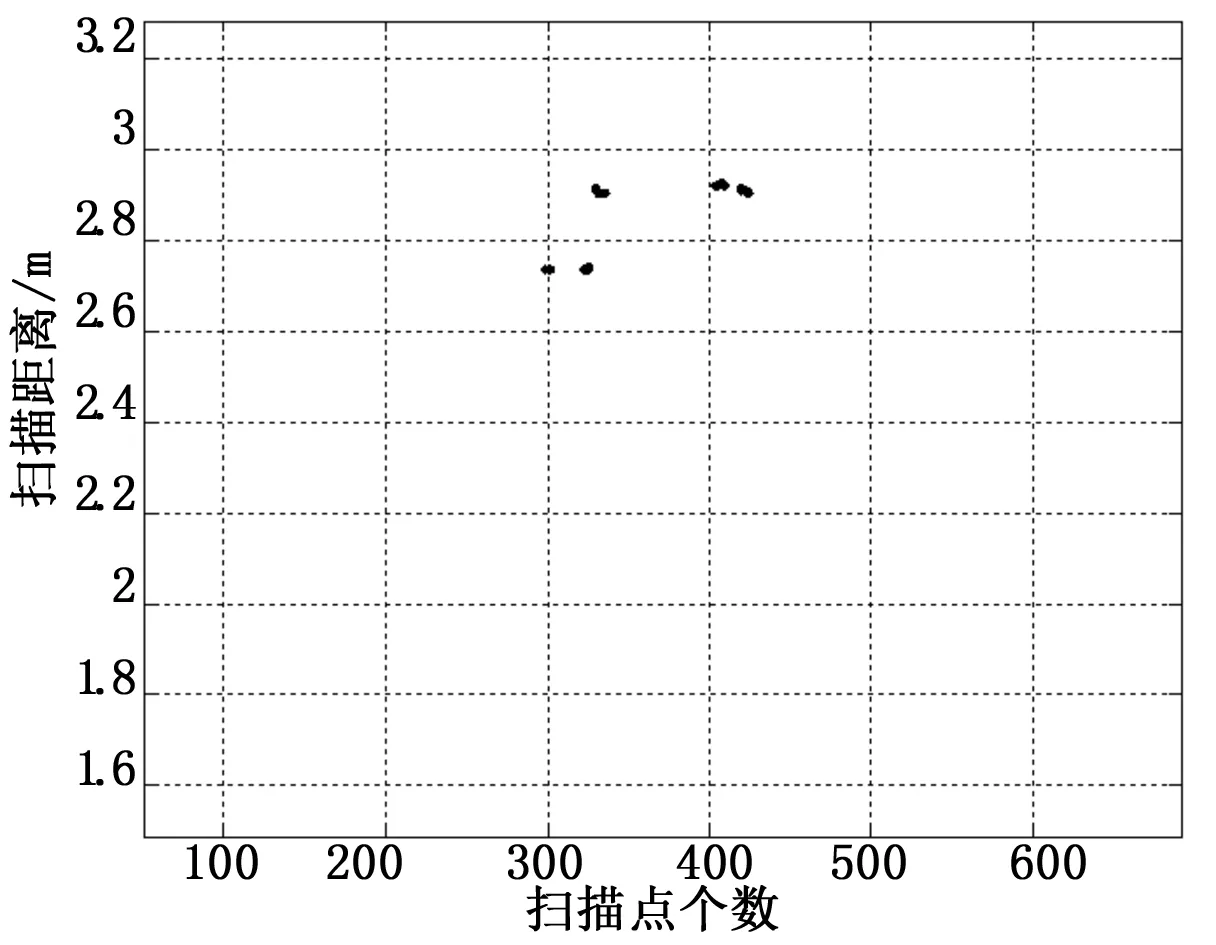
图8 滤波后数据点图
3.2目标识别与提取
对数据进行滤波处理后将得到的信息以数组的形式表现出来,其中dn表示扫描断面上扫描点与扫描中心之间的距离,θ为各距离所对应的角度,如式(4)所示:
(4)
设定某条距离线为阈值,生成与数组A同维的向量,对其元素赋值的规则为:所有大于阈值的距离值标示为0,其余连续在阈值内的距离依次标示为1,2,3,…m,若值相同则认为它们是轮廓线上的同一个凸起,将此向量附于A1形成向量A2。
(5)
剔除掉非凸起物后得到向量A3:
(6)
每个凸起点的最低点生成如下数组:
(7)
以通过各凸起最低点且平行于X轴的直线为下界,以某一距离为高度限制,以受电弓滑板的长度为宽度容限,生成如图9所示区域①,接触线就是此区域内的凸起点,再根据此其高度及距离判断其为哪种类型(单支接触线、双支接触线、刚

表1 上海南站现场隧道部分线路导高检测结果
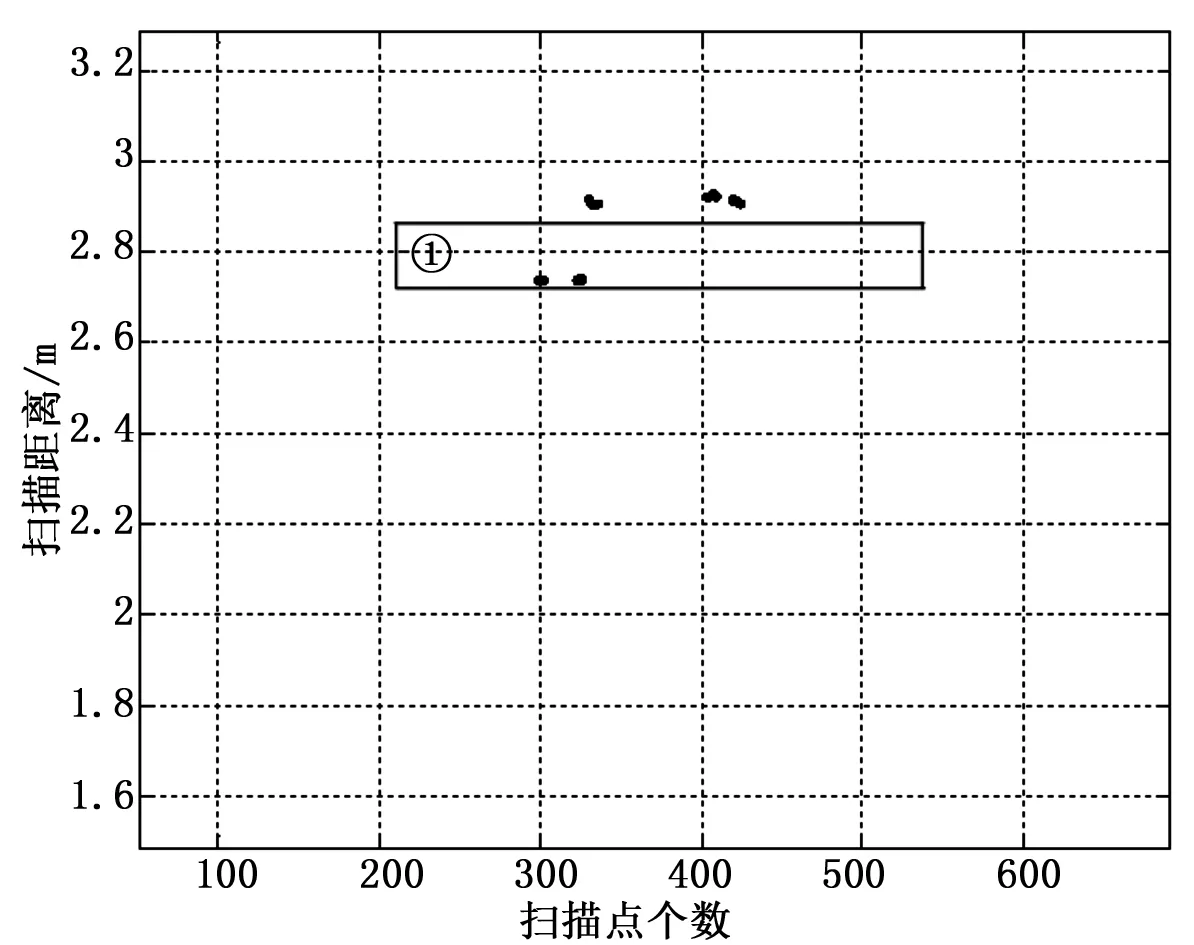
图9 目标识别区域
性悬挂、柔性悬挂等)[6],最后将判断出的接触导线凸起点的最低点坐标代入公式(1)和公式(2)可以得到接触导线的导高和拉出值。
4 实验结果与分析
该系统在上海地铁1号线上海南站的隧道内进行了现场实验,以接触网导线高度为例,表1所示为部分线路导高测量结果,由表中可以看出与以精度为1 mm的人工测量结果相比,本测量系统的导高测量结果基本相同,验证了接触网几何参数激光测量系统的正确性,同时采用激光扫描法的平均绝对误差为±3 mm,表明测量结果具有较高的准确度。
5 结论
接触网的参数检测及其检测方法的提高与完善是电气化铁道快速发展的重要组成部分,其中非接触式无损测量和数据智能化处理将是接触网日常参数检测的主要发展方向。本文介绍了一种基于激光扫描的接触网几何参数检测系统,能够满足接触网几何参数的非接触式测量,可完全取代传统接触式的人工道尺测量模式,且测量精度高达±3 mm,运行可靠,操作简单,具有广阔的推广前景和很好的经济效益。
[1]陈忠斌,周燕芳,韦宝泉. 便携式接触网几何参数激光测量仪的研制[J]. 传感器与微系统,2013,32(4):103-105.
[2] 罗亚敏. 地铁接触网几何参数检测方式的对比[J]. 铁道技术监督,2012,40(2):30-31.
[3] 马剑波. 接触网导高及拉出值激光测量仪的研究[D].北京:北京交通大学,2006.
[4] 傅可佳. 基于ARM的接触网几何参数检测系统的研究与实现[D]. 南昌:华东交通大学,2011.
[5] 王建利,刘晋浩,王典,等. 基于差分计算的林木测量二维点云数据滤波[J]. 西北林学院学报,2012,27(3):193-196.
[6] 牛大鹏. 非接触式接触网几何参数检测系统研究[D].成都:西南交通大学,2008.
Catenary Geometry Parameter Detection Method Based on Laser Scanning
Zhang Dong,Yu Chaogang
(College of Urban Railway Transportation, Shanghai University of Engineering Science, Shanghai201620, China)
In view of the current electrified railway catenary geometry parameters daily testing requirements, this paper proposes a catenary geometry parameter detection method based on laser scanning, the combination of hardware, such as laser scanner and industrial control, photoelectric encoder, programming processing to achieve the relevant geometric parameters of the non-contact sampling, sampling point positioning and data processing for catenary of various geometric parameters, through the experiment the method can effectively improve the catenary geometry parameters detection precision, measurement accuracy is ±3 mm, has practical significance.
catenary geometry parameters;laser scanning;photoelectric encoder;non-contact detection
2015-07-13;
2015-08-25。
上海市研究生教育创新计划学位点引导布局与建设培育项目(13sc002)。
张东(1989-),男,山东省枣庄市人,硕士研究生,主要从事轨道车辆状态检测方向的研究。
余朝刚(1967-),男,贵州省普安市人,副教授,硕士研究生导师,主要从事工业自动化方向的研究。
1671-4598(2016)01-0057-04
10.16526/j.cnki.11-4762/tp.2016.01.015
U226.8
A
