基于片光的货车侧面防护栏安装尺寸测量
2016-09-07王英军王道档
孔 明,王英军,单 良,赵 军,王道档
(中国计量学院 计量测试工程学院, 杭州 310018)
基于片光的货车侧面防护栏安装尺寸测量
孔明,王英军,单良,赵军,王道档
(中国计量学院 计量测试工程学院, 杭州310018)
提出了一种基于片光的货车侧面防护装置安装尺寸的测量方法;将线激光光源和摄像机固定在线性传动机构上,通过装置的线性移动,使激光光束在货车侧表面上产生移动,并用相机采集运动过程中的图像,利用激光三角法原理,对采集到的时序图像进行处理,实现对货车侧表面轮廓的三维重建,从而实现对货车侧面防护装置安装尺寸的测量;该方法避免了在普通视觉二维测量过程中,由于防护栏与前后轮胎不共面而造成的测量误差;通过对搭建的实验平台进行的研究表明,测量误差小于1 mm,远小于原二维测量方案测量精度10 mm,完全满足系统设计的要求。
货车侧面防护装置;激光三角法;片光;尺寸测量
0 引言
货车侧面防护装置在我国特有的人-车混行道路环境下起到了重要的作用。当路上行人、电瓶车、摩托车与货车发生侧面碰撞时,货车侧面防护装置起到缓冲吸力的作用,可有效防止行人或小型机动车钻入货车车底而造成更大的损失[1]。虽然国家对货车侧面防护装置出台了相应的标准来规范其安装位置和尺寸[2],但是目前对货车侧面防护装置的检测主要靠人工查验,并且需要车辆定期到指定的地方,经人工使用钢尺或卷尺对其进行直接测量,通过对比国家标准,看其是否达标[3]。
本课题组前期通过机器视觉的方法,设计了实验装置,对经过收费站的所有货车进行侧面拍照,利用图像处理技术实现了对货车侧面防护装置安装尺寸的在线实时检测,提高了检测效率,降低了人工劳动强度。但是该方法基于二维视觉的图像处理,获取到的图像只能表征物体反射回来的亮度信息,一是丢失了物体原有的深度信息,二是二维视觉检测对成像质量要求较高,这两方面导致了测量误差偏大,为10 mm[4],甚至有时图像处理算法的失效。
针对以上缺点,本文提出了一种基于片光技术的货车侧面防护装置安装尺寸检测方法,可以有效避免由于防护栏与前后轮胎不共面而引起的二维视觉方法检测中物体深度信息丢失造成的测量误差,提高了检测精度。
1 测量系统原理
1.1测量原理
片光测量系统主要由摄像机、线激光光源与线性传动装置组成,其中,摄像机与由线光源构成的光平面成一定夹角,此线激光光源向物体表面投向一束细亮的激光,并且发出的光平面与物体表面相交,再采用摄像机从另一个角度拍摄光条纹图像。
片光测量系统的测量基础是激光三角法[5],其原理图如图1所示。
(xl,yl,zl)T
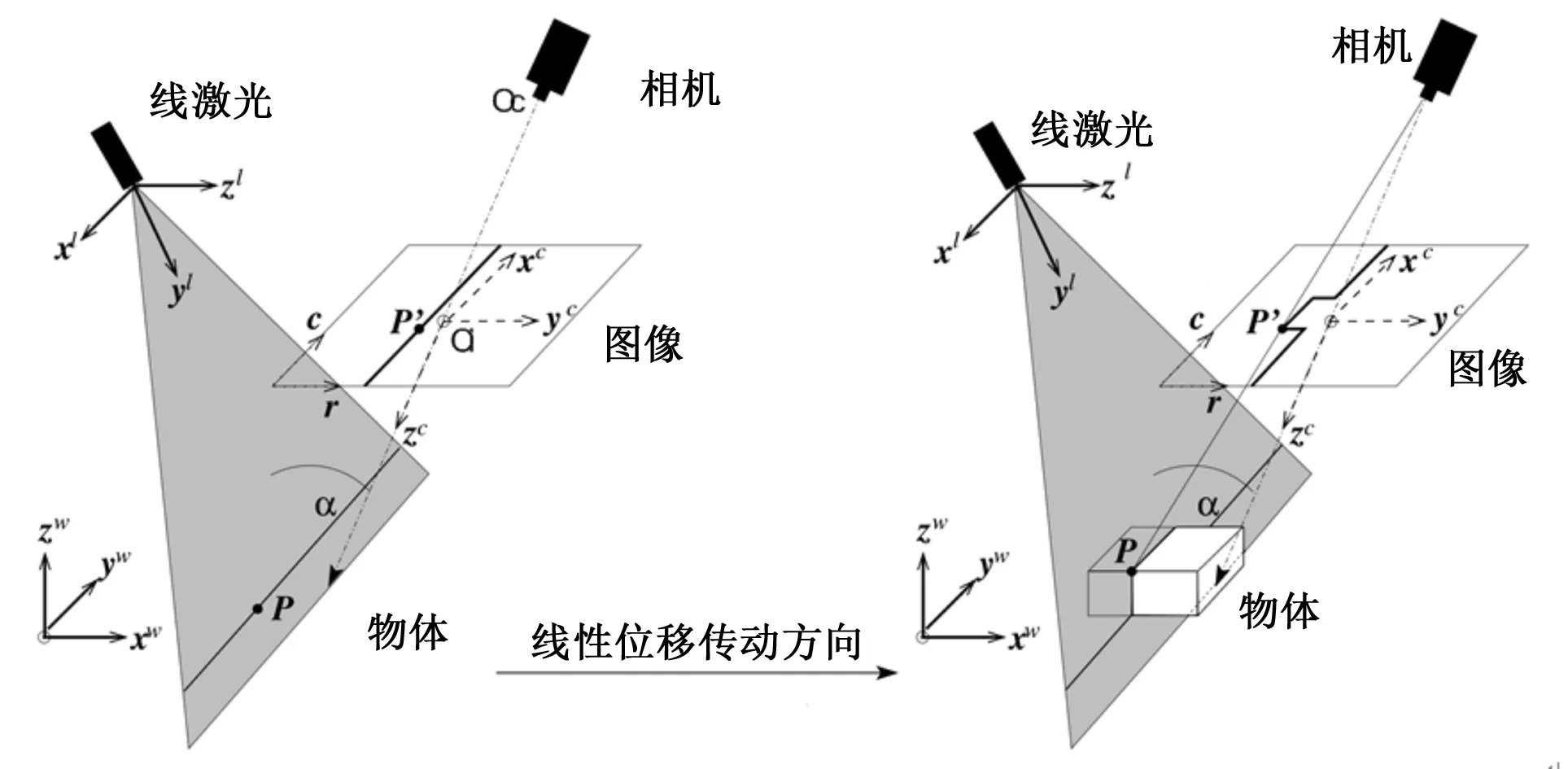
图1 片光测量基本原理
图1中,Oc为摄像机镜头光心,Oi为图像平面主点。光平面(灰色表示)坐标系为(xl,yl,zl)T,摄像头坐标系为(xc,yc,zc)T,世界坐标系为(xw,yw,zw)T,图像坐标系为(r,c)T,相机与光平面夹角为α。
假定一点P,存在于物体表面和光平面的交线上。设光平面在世界坐标系下的平面方程为:
axw+byw+czw+d=0
(1)
点P在图像中的像点为P’,则P与P’点的连线通过摄像机的光心Oc,Oc与Oi点的连线即为相机光轴。若已知相机的焦距以及摄像机的内外参数,即可得知过Oc与Oi点直线的方程,继而根据透视成像原理和图像中P’点的坐标,就可以得到过Oc与P’点的直线方程,如式(2)所示:
(2)
式(2)中,(xc,yc,zc)T与(xP,yP,zP)T分别为Oc与P’点在世界坐标系下的坐标。
联立式(1)和(2),求得直线OcP’与光平面的交点,即为P点坐标。
线激光光源投射一束激光,形成光平面[6],光平面与相机光轴的交点取决于物体的高度。物体高度变化,引起光平面与相机光轴交点的变化,被相机采集到的光条也就不再表现为直线,即其体现了物体的轮廓高度[7]。若使物体与光源、相机按一定步长成相对线性运动,可以得到一系列轮廓条纹构成的图像,将条纹所在区域设置成大小合理的检测区域(即感兴趣区域,ROI),依次读取所有图像,使用基于亚像素精度的边缘提取算法提取条纹,检测相邻的图像中x方向上的变化并分别将其纵横坐标保存下来。然后由通过标定得到的片光光平面位姿和相机内外参数,将上述坐标映射到世界坐标系中,即可得到物体轮廓的三维坐标
1.2系统原理
测量系统示意图如图2所示。测量系统的装置包括计算机、摄像机、线激光光源、线性移动装置和两个超声波测距传感器。超声波向垂直于导轨的方向发射,当货车停下来进行缴费时,即进入了检测区域,当货车完全进入到两个超声波传感器的感应范围后,计算机接收到超声波的发射脉冲,打开线激动光源和摄像机,并通过脉冲计数输出驱动信号,驱动线性移动装置按一定步距从货车前部移动到后部,期间,线激光光源一直打开,相机进行录像。当拍摄完毕后,线性移动装置将相机和光源移动到货车前部方位,计算机将录的视频解码,提取每一帧图片进行处理,最终得到防护栏到前后车轮的距离、车辆上部构件和地面的距离,并输出显示在屏幕上。

图2 测量系统示意图
2 实验研究
为了验证本文方法的可行性,在实验室搭建了实验平台,进行实验研究。实验系统中,CCD摄像机光轴垂直于防护栏所在平面,线激光光源的光平面与相机光轴的夹角约为60度,激光光束为竖直方向,即垂直于图像的行方向。实验程序流程图如图3所示。
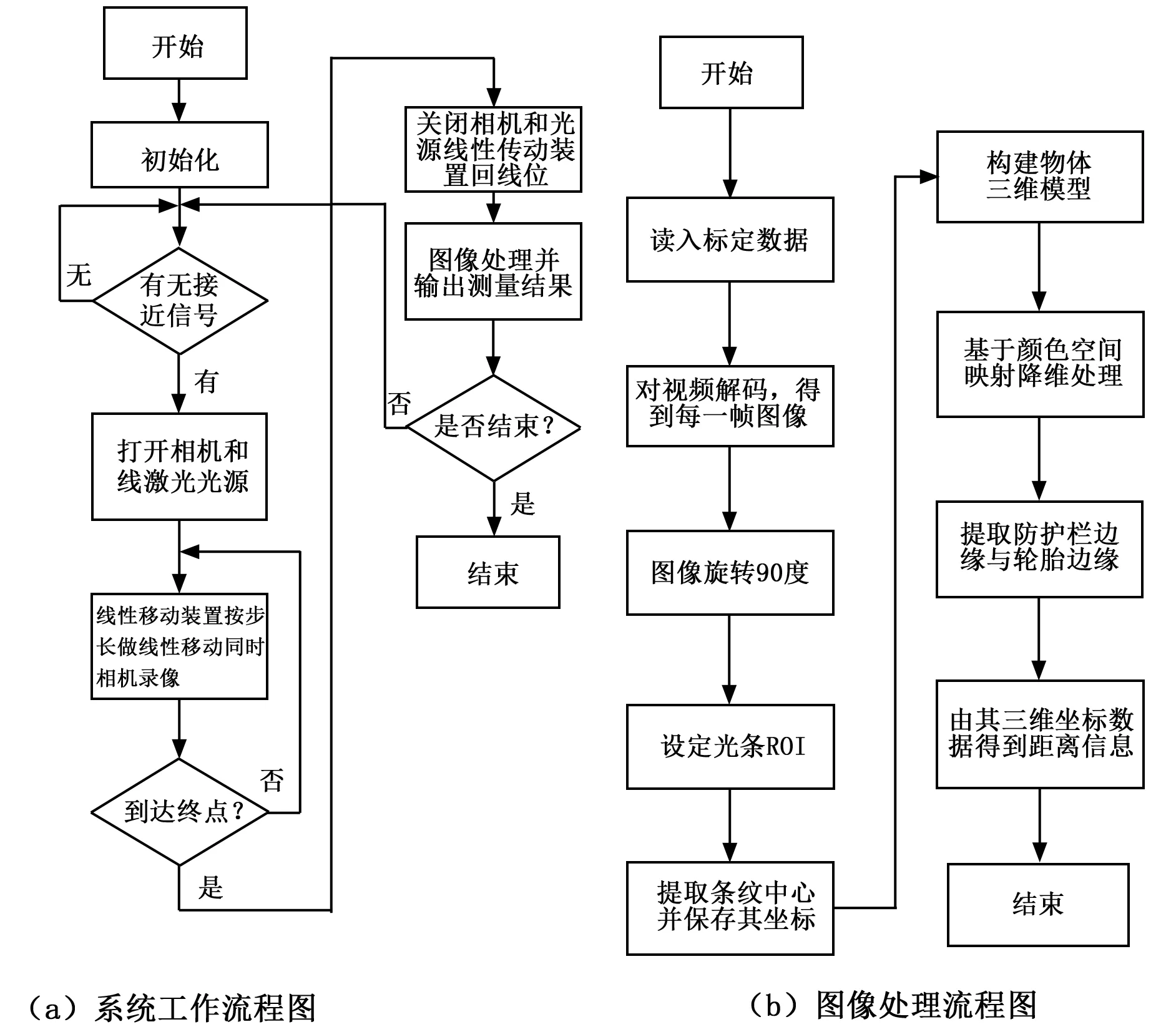
图3 实验流程图
图3(a)为系统工作流程图:在实验过程中,打开软件后首先进行初始化工作,包括检查相机与数据采集卡PCI1761是否能正常工作;然后监听数据采集卡的输入端口,如果有接近信号,计算机控制打开相机和线激光光源,线性移动装置按设定步长做线性移动,同时相机进行录像;当到达线性装置的终点时,关闭相机和线光源,线性移动装置回归原位,开启图像处理,如果接收到结束信号,系统停止工作并退出。
图3(b)为图像处理流程图:首先读入通过标定得到的光平面位姿参数和相机内外参数,然后对录取的视频进行解码,得到每一帧图像,逐张读取并旋转90度,设定光条所在的尽可能小区域为ROI区域,提取条纹中心,并保存其坐标;基于这些坐标和标定数据构建防护栏和轮胎的三维模型,再根据颜色映射模型[8]将三维点云数据映射到二维平面,经由Blob分析、边缘检测、Hough算法检测圆和直线[9]、椭圆和直线拟合等算法提取防护栏和轮胎边缘,由边缘点的三维坐标得到实际的距离信息并输出。
实验完成的前提是完成测量装置的标定,即片光光平面位姿的标定和相机内外参数的标定
2.1片光测量装置的标定
为得到物体轮廓的三维参数,在实验前,需要对片光测量装置进行标定,片光测量装置的标定包括:相机的内外参数和光平面位姿。
1)相机标定:
相机标定是为了得到世界坐标系到图像坐标系的映射关系。根据相机标定原理[10],采用自制的Halcon标定板进行标定实验。标定板的宽度和高度均为20 mm,共7×7个黑圆点,每个黑圆点的直径为12.5 mm,黑圆点圆心之间的距离为2.5 mm。从不同角度拍摄,共拍摄16幅图像,如图4所示。利用Halcon标定算法进行标定,标定结果如表1所示。

图4 标定实验图

项值项值f0.00799tx0.00778κ-731.947ty-0.31261sx2.751×10-6tz0.29659sy2.750×10-6α359.104cx1342.91β359.107cy1006.45γ0.47653
表 1中,f,tx,ty,tz的单位是米,α,β,γ的单位是度。κ无量纲。
2)光平面位姿标定:
光平面的标定是指在摄像机内外参数已知的前提下,利用式(1)和式(2),通过计算光平面上特征点的空间三维坐标,求得光平面位姿的过程。光平面位姿包括一个平移向量Tl和一个旋转向量Rl。使用三点法标定的过程示意图如图5所示。(xl,yl,zl),(xc,yc,zc),(xw,yw,zw) 分别是光平面、摄像机、世界坐标系。P1和P2是世界坐标系上位于z=0平面上的点,P3是位于物体上轮廓上的点,选取P3时注意要尽量处于物体轮廓的最大高度处。分别在这3个点上放置标定板(此处采用自制的Halcon标定板),并采集两次图像。一次是关闭线光源拍摄,一次是打开线光源拍摄带有线光束的图像。

图5 三点法标定示意图
第一次拍摄的图像作为参考图像,根据放置的标定板和已标定的相机内外参数得到标定板的准确位姿,第二次拍摄的带有线光束的图像为靶标图像,利用已得到的精确位姿求解激光束的世界坐标。P1,P2,P3这三点可以联结成一个平面,求解平面方程即可确定光平面的位姿。
光平面位姿标定参数如表 2所示。

表2 光平面位姿标定参数
3 实验结果
采取本系统方法采集的图像如图6(a)所示。对CCD采集到的视频进行解码[10],提取每一帧,旋转90度后设定ROI区域(图6中矩形区域),然后进行基于亚像素的光束条纹中心提取[11],并保存其坐标,构建防护栏和车轮的表面轮廓,如图6(b)。通过已标定的相机的内外参数和光平面位姿,将这些坐标映射到世界坐标系中,从而得到车轮到防护栏的边缘之间的距离。
Xw

图6 采集与重建后的图像
表3是图6(a)中A,B两点的世界坐标,A点表示防护栏的边缘,B点表示轮胎的边缘。

表3 三维空间坐标
通过表3中的车轮和防护栏的三维坐标,可以计算出车轮到防护栏的距离Δx,并用白光三维扫描仪测得实际距离作为真实值进行对比。由于实际情况中,货车停靠的位置和角度都有些许偏差,为了模拟实际情况,进行10组的处理与测量,结果如表 4所示。由表 4可以看出10次测量结果中,最大偏差为0.97 mm,最小偏差为0.13 mm,10次测量的平均测量偏差为0.62 mm,标准差为0.70 mm。
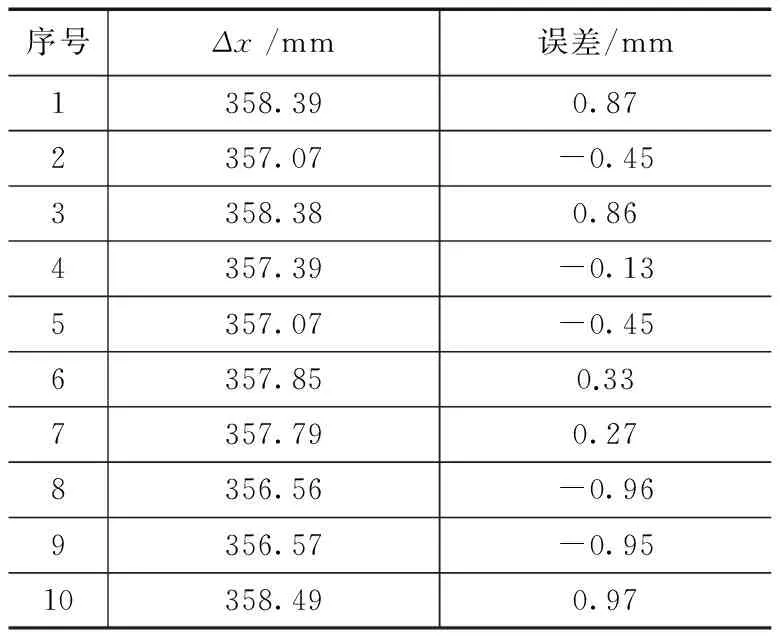
表4 重复性实验数据
表5为课题组已有的基于二维视觉测量技术[4],对货车侧面防护装置尺寸进行测量的结果统计。10次测量中,最大偏差为9.85 mm,最小偏差为1.08 mm,10次测量的平均测量偏差为5.76 mm,标准差为6.44 mm。

表5 二维视觉方法测量数据
通过以上表格可以看出本文采用的基于激光三角法的片光技术,实验精度小于1 mm,而先前使用二维视觉测量方法由于空间深度尺寸信息丢失而引起的误差可达10 mm。相比之下,前者大大提高了测量精度,测量误差小于原方法的10%。
4 结束语
本文提出的基于片光技术的货车侧面防护装置安装尺寸检测方法,从原理上避免了由于货车防护栏与车轮不共面而造成的误差,通过搭建实验平台,并对模拟实验进行处理和结果分析,表明该方法的测量结果精确可控制在1 mm以内。后期拟通过减小线性移动装置步距、或采用高精度标定板进行片光系统的标定,来进一步减小测量误差。
[1]程勇, 朱西产. 大型载货汽车被动安全性的特点及改进措施[J]. 汽车技术, 2002(2): 1-4.
[2]国家质量监督检验检疫总局. GB11567.1-2001. 汽车和挂车侧面防护要求[S]. 北京: 中国标准出版社, 2001.
[3]刘翰东, 仲伟坤. 我国载货汽车后下部防护标准存在的问题及建议[J]. 汽车技术与研究, 2010, 6:43-45.
[4]孔明, 何洋洋, 郭天太. 图像处理的货车侧面防护装置安装位置的研究[J]. 中国计量学院学报, 2014, 12(4):56-62.
[5]李冬冬,王永强,许增朴,等. 激光三角法在物面倾斜时的测量误差研究[J]. 传感器与微系统,2015,02:28-29.
[6]王颖,张圆. 一种基于平面靶标的圆结构光标定方法[J]. 红外与激光工程,2013(S1):174-178.
[7]张维光,赵宏,张琦,周翔. 线结构光三维轮廓测量系统的标定方法[J]. 中国激光,2009,1:182-188.
[8]徐志节,杨杰,王猛. 一种新的彩色图像降维方法[J]. 上海交通大学学报,2004,12:2063-2067.
[9]祁亚芳,杨明. 一种改进的随机Hough变换检测圆的方法[J]. 数学的实践与认识,2014,17:189-195.
[10]王富治,杨平,黄大贵. 基于相机定标与亚像素算法的二维图像测量系统[J]. 计算机测量与控制,2005,12:1325-1328.
[11]贾卫平,王邦国. 基于Hessian矩阵的多结构光条纹中心快速提取方法[J]. 大连大学学报,2014,6:34-37.
Measurement of Truck Side Guards Based on Sheet-of-Light
Kong Ming, Wang Yingjun, Shan Liang, Zhao Jun, Wang Daodang
(College of Metrology & Measurement Engineering, China Jiliang University, HangZhou310018,China)
A method of measuring the installation size of the truck side guards based on the sheet-of-light is presented. The laser line projector and the camera are fixed on the linear transmission mechanism. Through the linear movement of the device, the laser line moves on the side of the trucks. The images in motion collected by camera are processed to reconstruct the surface of the truck side guards, by using the laser triangulation principle. As a result, the measurement of the installation size of truck side guard is realized. This method avoids the error of measurement caused by the side guards not coplanar with the front and rear tires in the ordinary visual two-dimensional measurement process. The research on setting up the experimental platform shows that the measurement error is less than 1 mm, is far less than 10 mm which is the measurement precision of the original two-dimensional solution. It completely satisfies the requirements of system design.
truck side guards; laser triangulation method; sheet-of-light; size measurement
2015-07-13;
2015-08-25。
国家质量监督检验检疫总局公益性行业科研专项 (201310116)。
孔明(1978-),男,江苏吴江人,教授,硕士研究生导师,主要从事机器视觉、精密仪器、光电检测方向的研究。
赵军(1960-),男,黑龙江哈尔滨人,教授级高工,硕士研究生导师,主要从事精密仪器、光电检测方向的研究。
1671-4598(2016)01-0028-03
10.16526/j.cnki.11-4762/tp.2016.01.007
TP291
A
