智能软件测姿测向仪*
2016-09-07魏彦飞耿建平施浒立
魏彦飞,耿建平,施浒立
(1. 桂林电子科技大学电子工程与自动化学院, 广西 桂林 541004;2. 中国科学院国家天文台, 北京 100012; 3. 北京日月九天科技有限公司, 北京 100012)
智能软件测姿测向仪*
魏彦飞1,2,耿建平1,施浒立2,3
(1. 桂林电子科技大学电子工程与自动化学院, 广西 桂林 541004;2. 中国科学院国家天文台, 北京 100012; 3. 北京日月九天科技有限公司, 北京 100012)
机械、电子和软件技术是推动社会不断进步和发展的重要技术。随着计算机和微电子技术的快速发展,人们的工作和生活开始越来越多地依赖于软件技术[1]。文中论述了载体测姿测向由机械测姿装置到电子测姿装置,再到如今迅速崛起的智能软件测姿装置的发展历程,并着重介绍了GPS/BDS软件测姿仪的设计理念、测量原理和技术及姿态角的测量流程。智能软件测姿测向仪具有简单、方便、灵活和智能等特点,有很好的应用前景。
测姿测向;载波相位测量;智能软件
引 言
从古至今,掌握了解方向和测定确定方向以及测量确定姿态,是人们从事日常活动时需要掌握的重要参数。早年测定方向的工具是机械测向装置,如指南针、罗盘等。测定姿态的工具是机械测姿装置,如水泡水平仪。有了电气器件和电子技术以后,测姿测向装置发生了变化,有了电子陀螺、电子测向仪和电子倾角仪等。电子测姿测向仪发展到今天,因计算机技术和微电子技术的发展,其性能的提高开始依赖于软技术,即依靠算法和软件。本文根据测姿测向装置发展的上述脉络,介绍了测姿测向仪发展中的设计理念及应用状态。
1 机械测姿测向装置
典型的机械测向装置是指南针(见图1)。指南针的始祖是司南,司南是由天然的磁铁矿石打磨提炼成杓形后将其放在有方位刻度的圆盘上指示方向的装置(见图2)。由于天然磁石琢磨成司南杓,成品率低,磁性弱,转动时与圆盘接触产生的摩擦阻力较大,指南的
效果往往会受到影响[2]。在以后漫长的历史岁月里,经过人们不断的改进和摸索,司南杓演变为简便的针形,天然磁石制作发展为人工磁化,从而使磁针的磁性更强,磁针转动时的摩擦力越来越小,使得指南针的准确性得到了极大的改善。
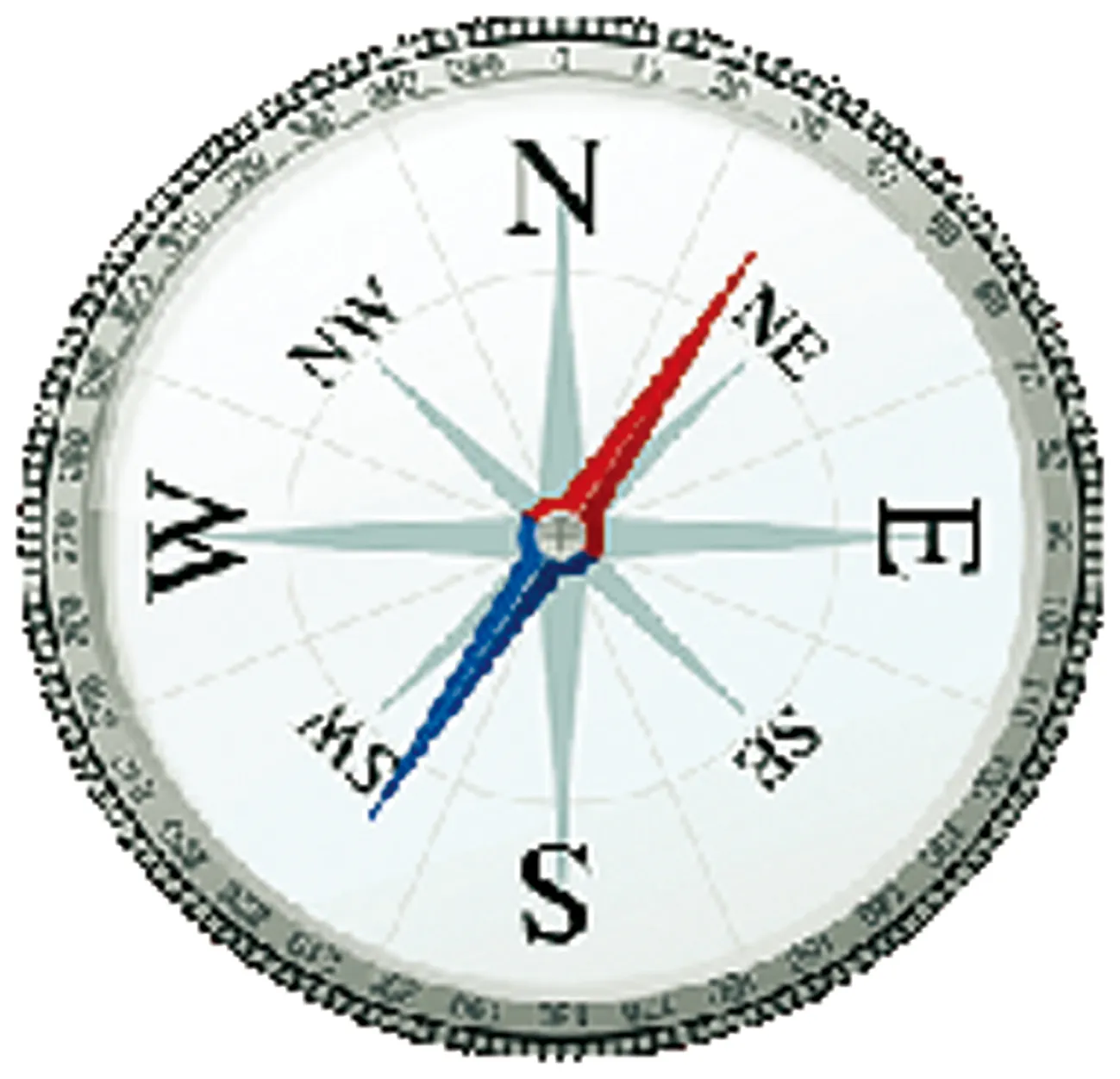
图1 典型的指南针
图2 指南针的始祖——司南
虽然指南针有辨别方向的功能,但是存在不少不足之处。比如指针稳定性差,指针定向稳定所需的时间较长;方向度数的判断依赖人的经验和视角,出现误差的可能性较大;生产制作过程中会产生机械误差;在建筑物里或者在周围磁场强的情况下,产生的误差变大;抗干扰能力不足。
还有一类机械测向装置是罗盘。罗盘是在指南针的基础上发展而来的,其功能要比指南针多。指南针侧重于指示方向,罗盘刻度更精密,能示意详细的角度,还有测量及示意倾角等功能。
典型的机械测姿装置是水泡水平仪(见图3)。水泡水平仪利用水、水银和酒精等液体的液面能保持水平这一特性,以液面为基准实现姿态测量。这种原始的检测方法有诸多缺点:仅仅依靠肉眼观察水泡的位置来估计测量值会导致测量误差偏大;水泡水平仪只能完成特定环境下的角度测量,功能较为单一;靠观测水泡的位置来估计角度也导致其测量的范围较小。

图3 水泡水平仪示意图
总的来说,机械式测姿测向装置简单,成本低,容易操作,但其往往也有很多不足,如定位不准、不灵活、易损坏等。
2 电子测姿测向仪
电子技术的发展和广泛应用使测姿测向装置发生了变革,出现了无线电测向仪、电子陀螺仪、电子倾角仪和电子罗盘等测姿测向装置,由使用机械装置测向发展为应用电子技术辅助,或用电子技术实现测姿测向。下面以电子倾角仪和电子罗盘为例加以说明。
电子倾角仪的测量范围可达±90°,测量误差小于0.1°,可满足大多数工程应用要求。它与传统的水泡水平仪相比,具有电子检测、即时显示、精度高、量程宽、使用及携带方便等特点,完全脱离了传统的看水泡移动估计倾角值的测量方法,大大提高了工作效率。此外,由于电子倾角仪输出的是数字结果,所以它可以结合其他数字设备,组成一个功能更强大的仪器[3]。
电子倾角仪的工作原理是预先设置基体中轴旋转的某一方向为正方向,当轴沿此方向旋转时,计数增加,当轴沿相反方向旋转时,计数减少。电子倾角仪的计数与倾角仪的初始化角度有关。初始化倾角仪时,其值通常会设置为0。在这种情况下,通过计算旋转的角度,倾角的位置就能够轻易地检测出来。
电子倾角仪的硬件主要由倾角传感器、A/D模块、单片机模块和显示模块4大部分组成。其结构组成如图4所示。
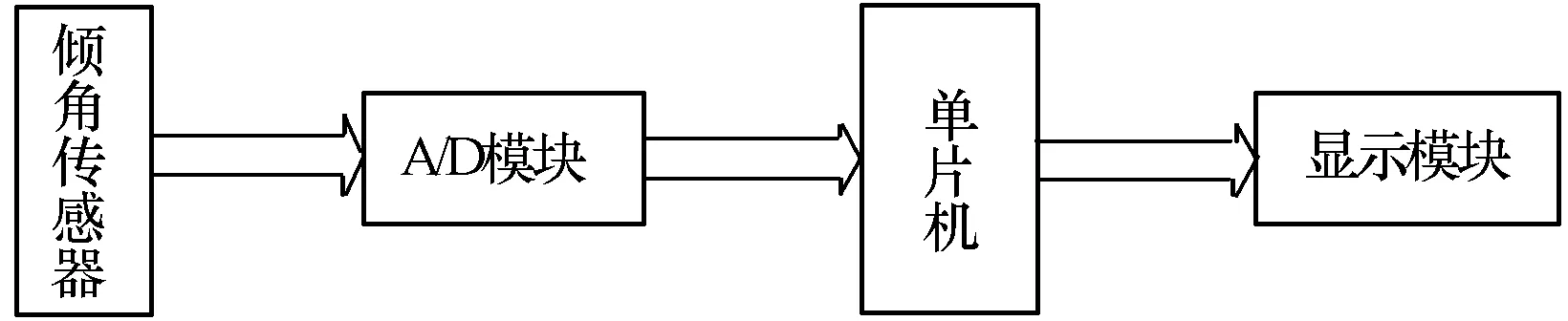
图4 电子倾角仪系统结构框图
其中,倾角传感器是整个电子倾角仪的关键部件,经常用于系统的水平测量。倾角传感器作为测试单元输出电压信号,从工作原理上可分为“固体摆”式、“液体摆”式及“气体摆”式3种。倾角传感器还可以用来测量相对于水平面的倾角变化量[4]。A/D模块的作用是将电压信号由模拟量转换为数字量。单片机是整个系统的核心部件,主要负责接收A/D模块输出的数据,并对其进行处理。显示模块则是人机交互的通道,可以通过显示模块直观地读取倾角仪最后的计算结果。
电子倾角仪操作的主流程如图5所示。
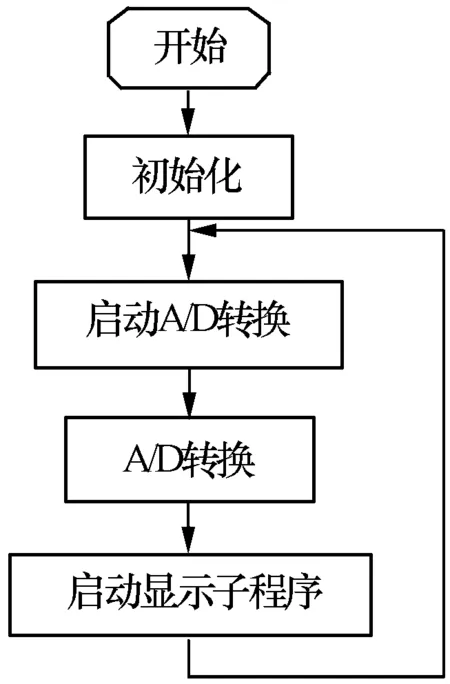
图5 电子倾角仪系统主流程图
电子罗盘姿态角测量的基本原理是根据地磁场的水平分量指向磁北的特性,利用磁场传感器可以获得磁航偏角,在非水平状态下,需要倾角仪提供电子罗盘的姿态角,根据倾角补偿算法得到地磁场水平分量阵列,从而根据三角函数解算得到磁航偏角;在静态情况下,加速度传感器可以准确地测量重力加速度在载体坐标系上的分量阵列,进而解算出电子罗盘的姿态角[6]。典型电子罗盘装置的组成如图6所示。
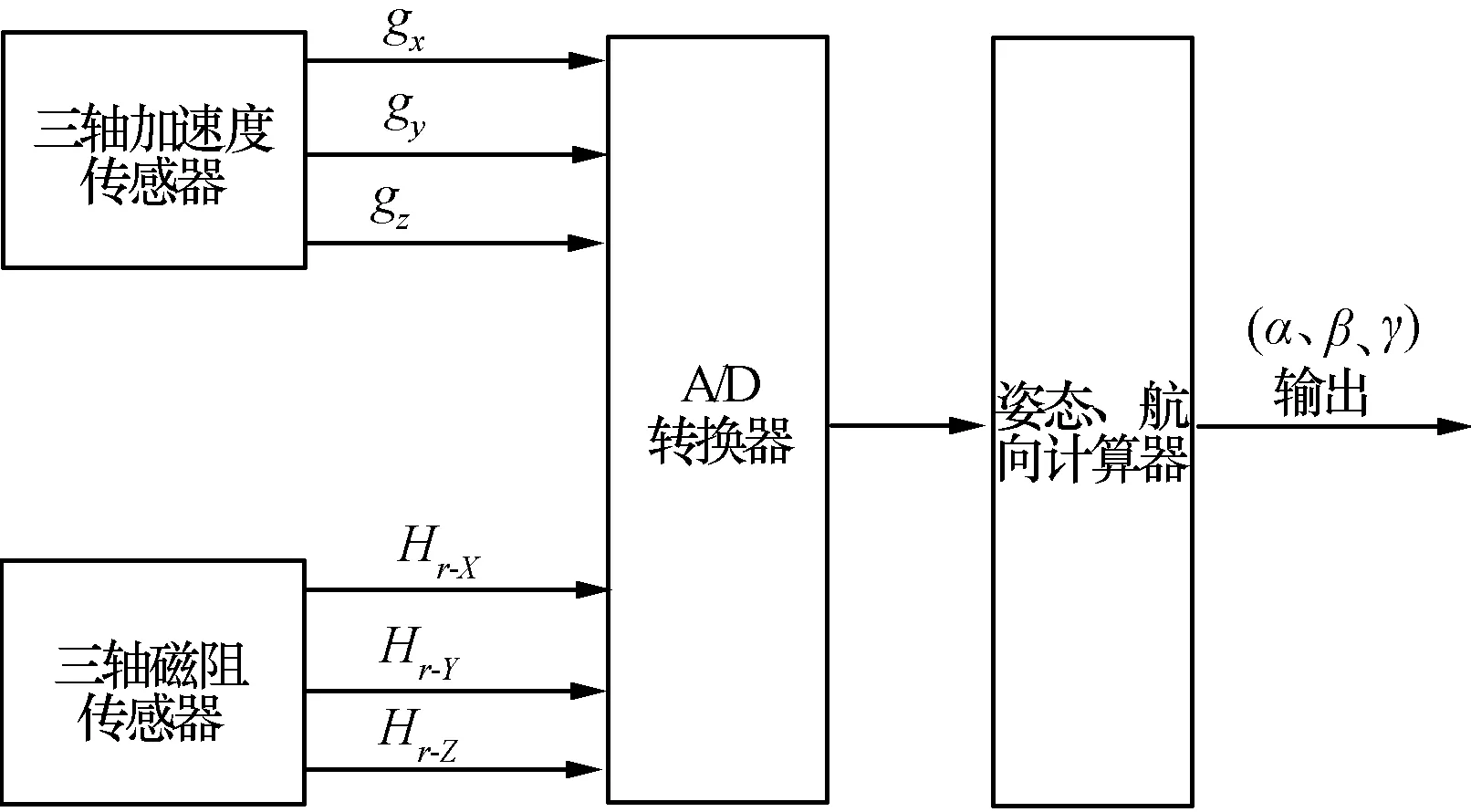
图6 典型电子罗盘组成示意图
如图6所示,电子罗盘主要包括3大模块:传感器模块、数据采集模块和姿态航向解算模块。三轴加速度传感器负责采集三维空间中的加速度分量,三轴磁阻传感器负责采集地磁场分量。但是由于磁阻传感器输出的电压信号很微弱(只有mV级),所以必须通过运算放大器将其放大后经A/D转换器转换为数字信号。将转换后的数字信号送入微处理器进行实时的姿态矩阵计算,最终将得到稳定的姿态参数,通过串口在上位机实时输出[6]。
在传统的导航定位中,载体坐标系和当地水平坐标系之间的转换关系可以通过3个姿态角参数(航向角、俯仰角和横滚角)来表示。其中航向角α为载体纵轴在水平面内的投影与地理北之间的夹角;俯仰角γ为载体横轴和水平面之间的夹角;横滚角β为绕载体纵轴的旋转角[7]。
将三轴磁阻传感器对应于载体的3个坐标轴正确安装后,测得结果(HX,HY,HZ)为地磁场磁感应强度在载体坐标系3个坐标轴上的投影分量。在当地水平坐标系中,磁阻传感器3个轴输出为(Hr-X,Hr-Y,Hr-Z)。令其转换矩阵为
(1)
(2)
则可得:
(3)
式中:rrol为传感器横滚角方向上的转换矩阵;rpit为俯仰角方向上的转换矩阵。
假设加速计测得的3个轴的重力加速度分别为gx、gy、gz,可由下列公式得到航向角α、横滚角β、俯仰角γ:
(4)
电子罗盘与传统机械式、指针式和平衡式罗盘相比具有体积小、精度高、成本低及稳定可靠等优点[8],可作为GPS、陀螺仪等导航手段的补充,被广泛应用于导航仪器和姿态传感装置中,其测量精度直接影响到系统的性能。该技术已经成功用于小型无人机、手持通信终端、便携式通信终端等设备,被广泛运用在航空、航海和移动车辆快速定向定姿领域。
除了电子倾角仪、电子罗盘以外,还有多种电子测姿测向仪,如无线电航向仪、无线电测向仪以及电子陀螺等,其中无线电航向仪需要利用高频无线电信号,很容易受到电磁波的干扰。
3 软件测姿测向仪
随着计算机技术的蓬勃发展和嵌入式微电子器件的广泛应用,机械装置以及电子机械装置发生了深刻的变化。如上述电子罗盘中就运用了数字处理设备来提高机电性能。下面以利用卫星导航信号实现测姿测向为例加以说明。
3.1 基线方向矢量的测量原理

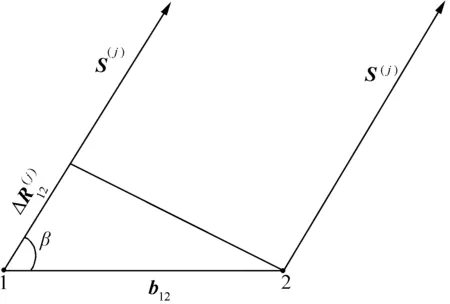
图7 基线方向矢量的测量原理图
众所周知,高精度的GPS测量必须采用载波相位观测值来实现,GPS/BDS基线矢量的测量就是通过载波相位差分的方式来实现的。因为连接在载体上的GPS/BDS基线都比较短(多数为几十厘米到几米之间),利用载波相位差分技术能够消除绝大部分的误差。下面以单基线为例加以介绍。GPS/BDS卫星的载波信号到达2个天线时可被视为平行波,这时2个天线接收的载波信号间的相位差为
λ(N1-N2)+λ(Δφ1-Δφ2)=eb12
(5)
式中:e为天线至卫星的单位矢量,天线的位置坐标可由GPS/BDS伪距定位求得,卫星的坐标由卫星星历解算可得[9];b12=[xyz]T为未知基线矢量在地球坐标系中的坐标;λ为载波波长;N为整周模糊度;Δφ为载波相位中不足一周的小数部分。
假设在同一时刻接收机能够接收到n颗卫星的观测数据,那么,通过下面的观测方程组就可以得到n组基线矢量坐标:
(6)
从式(6)可以看出,测得两天线接收的卫星载波信号间的相位差以后,只需要知道一组正确的整周模糊度N,就能够通过解算得到未知基线矢量。求解整周模糊度较为著名的算法有最小二乘模糊度搜索算法(LSAST)、优化Cholesky分解算法、LAMBDA算法、快速模糊度搜索算法(FASF)等。在这些搜索算法中,被广为接受的LAMBDA算法不仅有较好的性能,而且其理论体系比较完善。选择合适的整周模糊度求解算法就可以解算出基线矢量b。将b进行坐标转换,得到基线矢量bBFS(载体坐标系)、bLLS(地理坐标系)和两基线矢量的变换矩阵,姿态角就可轻易地解算出来[9]。
3.2 GPS/BDS姿态测量的观测方程
因为GPS/BDS载波频率高、波长短,这使得载波相位测量具有很高的测量精度(可达到mm量级),因此GPS/BDS测姿通常采用载波相位测量技术。
载波相位测量过程中存在诸如电离层误差(ρion)、对流层误差(ρtrop)、卫星钟差和星历误差(va)、接收机钟差(vb)、观测噪声(v)等误差源(多径误差暂不考虑)。因为存在着多种误差源,载波相位的测量方程可用下式来表述:
(7)
式中:φ为载波相位测量的真实值;λ为波长;R(j)为测量时刻接收机到用户的实际距离;N为整周模糊度。
3.2.1 载波相位单差观测方程
在超短基线的情况下,可以认为2个接收机接收同一颗卫星的信号路径相同,这样基本上就可以消除电离层、对流层以及卫星钟差的影响。对于多路径误差暂时不予考虑,由式(7)可以得出天线1和天线2对于同一颗卫星j的载波相位伪距方程[10-13]:
(8)
(9)
对式(8)、式(9)两式求单差得到:
(10)
(11)
由式(11)可以看出,接收机之间单差相位观测方程消除了卫星钟差和星历误差,电离层误差和对流层误差也被很好地消除了。
3.2.2 载波相位双差观测方程
当2个接收机同时对卫星进行观测时,它们的单差观测方程组为
(12)
对式(12)中的2个观测方程求差,可以得到:
(13)
式中,vb1、vb2表示接收机1和接收机2之间的钟差,与观测哪一颗卫星没有关系,并且目前GPS/BDS姿态测量系统的硬件多采用多个天线共用一个时钟基准的方式[14]。所以在同一时刻每一个接收机观测到不同卫星的钟差是相同的,即
那么,式(13)就可以化简为
(14)
由式(14)可以得出结论:GPS/BDS载波相位测量值经过双差以后,可以直接消除接收机钟差、卫星钟差和星历误差,能够大大降低电离层和对流层延时造成的误差。如果多个接收机共用一个时频基准,那么接收机内部的噪声误差也可以减小。
3.3 软件测姿测向仪的组成
典型的GPS软件测姿测向仪的实物见图8。

图8 GPS测姿测向仪
这是由珠海德百祺公司与北京日月九天科技有限公司合作研发的卫星测姿测向仪。它用一对天线接收卫星载波信号,每个天线后面有低噪声放大器和滤波器,再通过变频模块把L波段导航卫星信号从L波段变频至中频。两路中频信号同时进入基带模块进行相关,求解出两路信号之间的路径差(或用载波相位差表示)。基带信号输出至DSP,由DSP完成测姿测向计算。
3.4 计算流程
根据上述设计理念,便可以构成GPS/BDS智能软件测姿测向仪的工作流程:
1)利用接收机接收到的星历文件计算出观测卫星的位置坐标。
2)根据接收到的卫星观测数据建立载波相位差分观测组。
3)求解整周模糊度。选取合适的整周模糊度求解算法(如LAMBDA算法)快速确定整周模糊度。
4)由整周模糊度可以得到基线矢量在WGS-84坐标系中的坐标。
5)将解算出的基线矢量进行坐标转换,得出相关矩阵和不同坐标系(载体坐标系、当地水平坐标系)下的基线矢量坐标。
6)根据求得的相关矩阵和基线矢量坐标求解出载体姿态角。
典型的GPS/BDS智能软件测姿测向仪工作流程如图9所示。
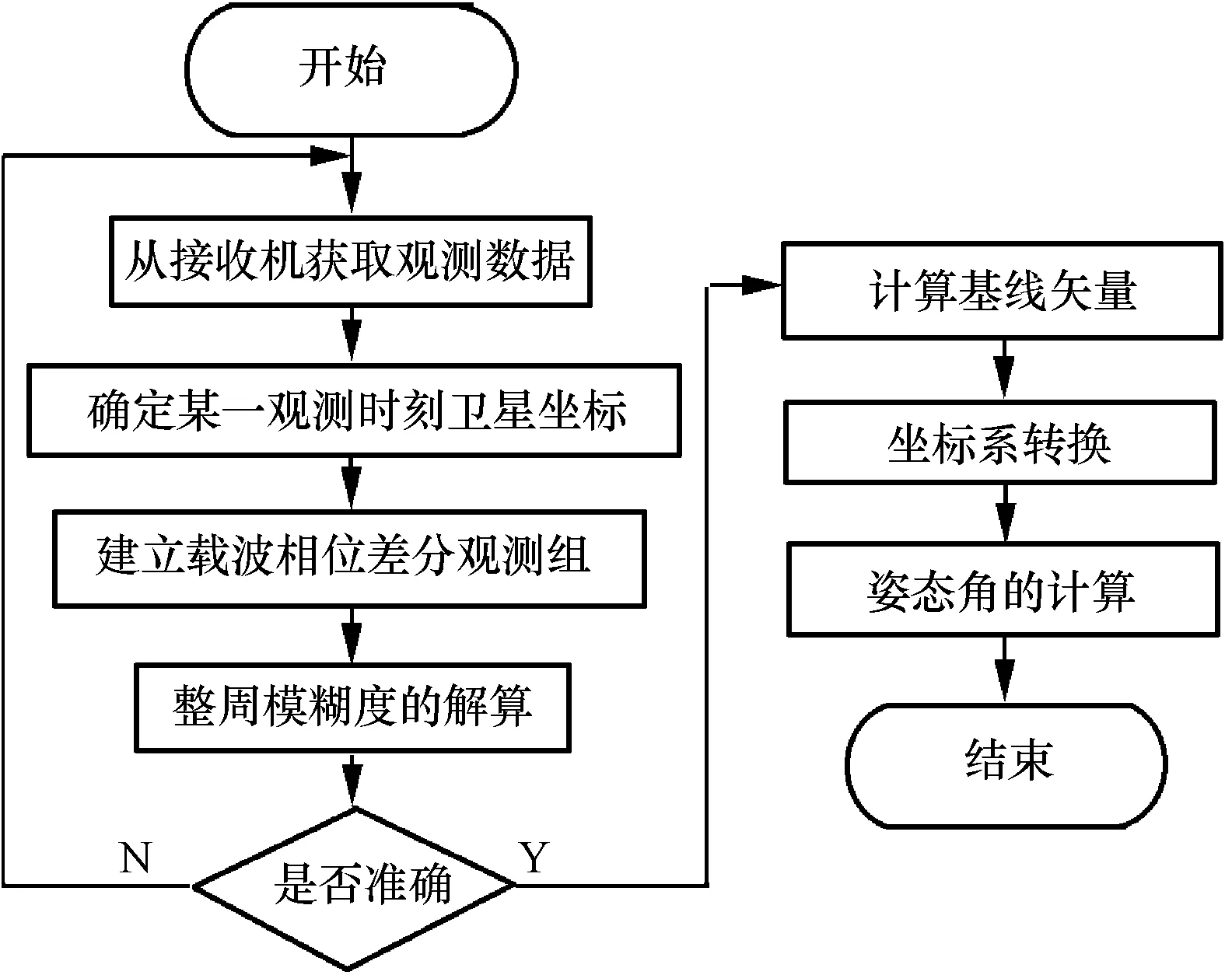
图9 GPS/BDS姿态测量流程图
4 结束语
从测姿测向仪的发展历程可见,仪器设备经历了从最初的机械测姿测向发展到利用电子技术的电子测姿测向的过程。计算机技术及软件技术的飞速发展,特别是嵌入式器件的发展和广泛应用,使电子机械装置发生了变革。那就是利用软件技术来扩展机电设备和装置的功能,来提升机电设备和装置的性能,甚至可以用嵌入式器件及软件来代替机电设备,称为机电功能的软件实现,具有简单、方便、灵活、智能等特点。
[1] 施浒立, 周津慧, 徐国华. 软件机械[J]. 电子机械工程, 2002, 18(5): 1-4, 15.
[2] 王仙洲. 论指南针的发明[J]. 青岛大学学报: 自然科学版, 2000, 13(3): 120-122.
[3] 张伟, 梁华为, 杨新钢, 等. 基于MSP430单片机的便携式数字倾角仪的研制[J]. 工业仪表与自动化装置, 2006(2): 70-72.
[4] 唐立军, 李倩, 张开锐. 一种新型MEMS倾角仪的设计及测试[J]. 测试技术学报, 2009, 23(3): 197-200.
[5] 胡超, 艾国祥, 庞峰, 等. 一种提高电子罗盘航向和姿态测量精度的新方法[J]. 上海交通大学学报, 2015, 49(2): 158-163, 168.
[6] 郑玉冰, 章雪挺, 刘敬彪. 磁阻式电子罗盘的设计[J]. 计算机测量与控制, 2008, 16(7): 1027-1029.
[7] 胡超, 庞峰, 李圣明, 等. 便携式甚小口径地球站快速寻星技术研究[J]. 机电工程, 2014, 31(11): 1396-1400, 1410.
[8] 王勇军. 基于磁阻和加速度传感器的三轴电子罗盘研制[D]. 桂林: 桂林电子科技大学, 2010.
[9] 高源骏. GPS测姿算法与天线布局研究[D]. 哈尔滨: 哈尔滨工程大学, 2011.
[10] 谢钢. GPS原理与接收机设计[M]. 北京: 电子工业出版社, 2012.
[11] SABATINI R, RODRIGUEZ L, KAHARKAR A, et al. Carrier-phase GNSS attitude determination and control system for unmanned aerial vehicle applications[J]. ARPN Journal of Systems and Software, 2012, 2(11):297-322.
[13] BARONI L, Hélio Koiti Kuga. Analysis of attitude determination methods using GPS carrier phase measurements[J]. Mathematical Problems in Engineering, 2012.
[14] 过静君, 葛茂荣, 张宏兵. 适用于航天器的GPS姿态测量算法和软件设计[J]. 清华大学学报: 自然科学版, 2000, 40(6): 99-102.
魏彦飞(1987-),男,硕士,主要研究方向为数据处理、导航定位和控制工程。
耿建平(1973-),男,博士,副教授,主要研究方向为测控技术、虚拟仪器、卫星导航和软件。
施浒立(1944-),男,博士,研究员,主要研究方向为天文技术方法、卫星导航定位及天文导航。
Attitude and Direction Finder Using Intelligent Software Technology
WEI Yan-fei1,2,GENG Jian-ping1,SHI Hu-li2,3
(1.ElectronicEngineeringandAutomationCollege,GuilinUniversityofElectronicTechnology,Guilin541004,China;2.NationalAstronomicalObservatory,ChineseAcademyofScience,Beijing100012,China;3.BeijingRiyueJiutianTechnologyCo.,Ltd.,Beijing100012,China)
Mechanical, electronic and software technologies play key roles in promoting progress and development of human society. With the fast growing of computer and microelectronics technologies, today people′s work and life rely more and more on software technology. In this paper the progress of attitude and direction measuring from mechanical device to electronic device and then to today′s fast growing intelligent software device are discussed. The design concept, measuring principle and technology and angle measurement process of software GPS/BDS attitude finder are mainly introduced. The intelligent software device is simple, easy to use, adaptable and of course intelligent. It has a bright application future.
attitude and direction measuring; carrier phase measuring; intelligent software
国家自然科学基金资助项目(271284F010203);广西自然科学基金资助项目(2014GXNSFAA118393)
2015-12-14
TN96
A
1008-5300(2016)01-0059-06
