基于扩展卡尔曼滤波算法的室内定位跟踪系统
2016-09-07凌海波周先存
凌海波,周先存
(皖西学院 信息工程学院,安徽 六安 237012)
基于扩展卡尔曼滤波算法的室内定位跟踪系统
凌海波,周先存
(皖西学院 信息工程学院,安徽 六安 237012)
为了解决无线室内定位系统实时跟踪位置坐标误差较大问题,提出一种基于扩展卡尔曼滤波(EKF)算法的室内定位方法。系统采用基于WiFi信号指纹定位,然后利用扩展卡尔曼滤波对估算的位置进行滤波,以改善WiFi指纹定位方法的精度,达到对目标实时跟踪。仿真和实验结果表明,该算法有效地改善了系统定位精度,能较好地满足室内定位的需求。
无线局域网;室内定位;扩展卡尔曼滤波;实时跟踪
无线室内定位技术已经被用于很多基于位置的应用,随着智能手机的普及,其应用越来越广泛。现有最新理论成果仍然面临很多挑战,WiFi信号会受到多径效应和环境动态变化的影响,在无线局域网络中对目标进行监测并跟踪,由于在室内复杂环境中,目标的状态会随着时间的变化而变化,并且传感器获取的数据受到室内环境的影响,此时直接用定位算法计算的位置和实际的位置会有很大的误差,从而影响了室内定位系统的精度[1-3]。跟踪定位系统应以最小的计算复杂度获得较高的定位精度,文献[4-6]提出了利用卡尔曼滤波、扩展卡尔曼滤波、粒子滤波等算法实现跟踪,其中扩展卡尔曼滤波算法收敛速度快,在实时跟踪定位中有着很广泛的应用。本文采用扩展卡尔曼滤波算法随定位算法估算的位置坐标进行滤波处理,进一步提高室内定位的精度。
1 基于WiFi信号指纹定位算法描述
1.1 基于RSSI测距定位算法


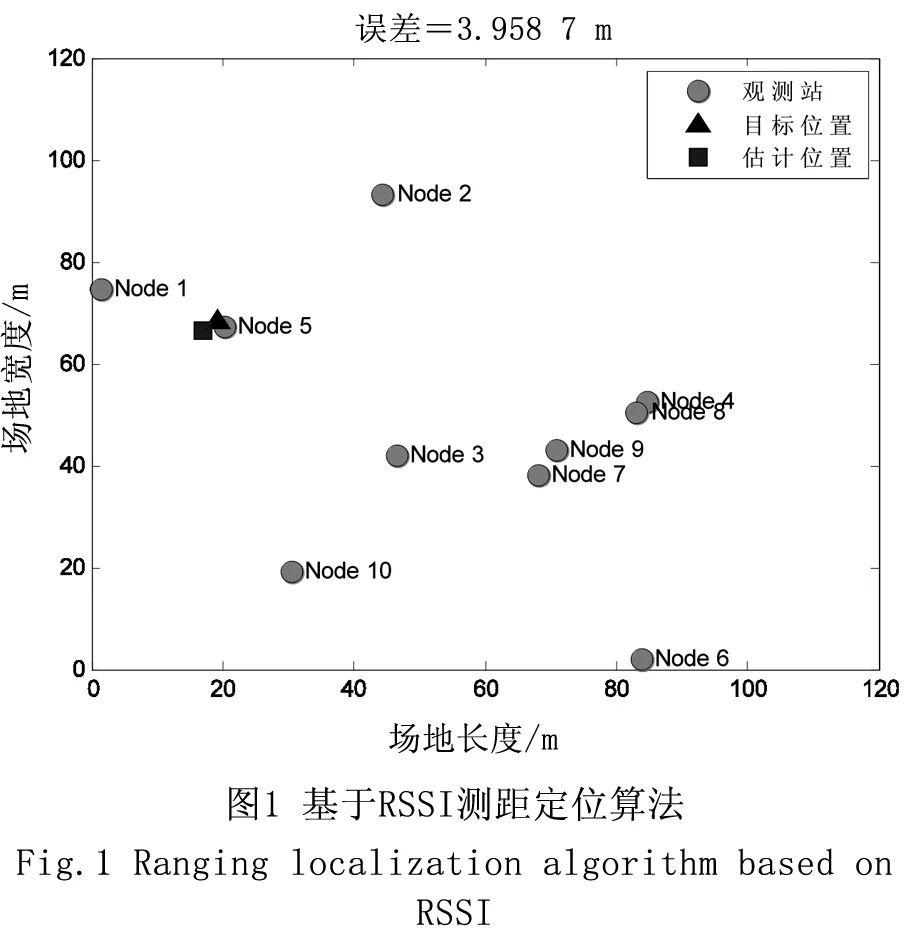
式中,A为无线收发节点相距1 m时接收节点接收到无线信号强度RSSI值。假设室内布置10个AP,根据RSSI定位原理仿真,图1为基于RSSI测距定位算法仿真结果,可以看出定位偏差为3.958 7 m,而实际的RSSI偏差更大。
1.2 基于WiFi信号指纹的定位算法
由于无线电波在室内传播会受到多径效应的影响,传统的基于到达时间(TOA)、到达角度(AOA)等难以实现定位。本文采用基于WiFi信号指纹定位,采用普通的商用AP以及WiFi终端能够方便测量RSS。通过利用无线信号在室内不同位置的特征区别,将这些特定位置的无线信号特征作为该位置的无线信号指纹,建立位置和指纹之间的数据库,以此寻找匹配的指纹,实现用户的位置估计,该方法在很大程度上解决了无线信号在室内传播的多径效应的影响。位置指纹估计方法分为两个阶段:训练阶段和定位阶段[8-9]。
在训练阶段,训练人员对室内定位区域进行位置采样,在每个采样位置上收集无线信号特征,并将采样的无线信号特征存入到位置指纹数据库中。在定位阶段,用户发送所在的指纹到定位服务器,服务器将该指纹信息与数据库中的指纹数据进行对比,将最相似的指纹所在的位置作为该用户位置估计。
本文采用位置指纹方法继续室内定位,主要采用概率方法建模构建每一个AP的信号强度。采样阶段,在目标区域内每隔1.5 m采样一个位置,将采样的位置信号指纹构建成无线指纹地图。假设共有k个AP,用户在不同的位置上接受到来自这k个AP的不同信号强度,假设采集点数为N,记录在N个采样点处的指纹数据,得到关于信号强度的k维向量,则采样点i接收到来自k个AP的信号强度为:
Si=(RSSIi1,RSSIi2,…,RSSIik)
i=1,2,3,…,N
其中,N表示采样点的总数;k表示AP的个数。
在定位阶段,设需要查找的位置x∈X,X为室内定位的位置空间。则,位置x所在的信号强度即为与s中的信号强度匹配最高的那个数据对应的位置,即P(x/s)的概率最大[10]。假设k个AP都是相互独立的,则根据贝叶斯理论得出:
argmaxx[P(x/s)]=argmaxx[P(s/x)]
又P(s/x)可以计算为:
因为信号强度可以通过高斯分布模型来确定。
2 扩展卡尔曼滤波目标跟踪算法
由于无线信号在室内传播过程中存在多径效应、衰减等干扰,使得RSS存在时变性。另外,RSS在空间上的传输能量也有限,会随着距离的增加而减弱,使得RSS作为指纹室内定位的精度有限。且在实时跟踪过程中,系统要求达到实时的效果,需要实时跟踪移动设备读取信号强度样本数据。由于目标状态随着时间变化而变化,采集的信号强度也受到噪声干扰,并且用户本身移动过程不平缓,这些都严重影响了定位的精度和稳定性。
本文采取扩展卡尔曼滤波算法对估算的位置进行滤波处理,进一步提高系统定位的精度。
通常,目标跟踪系统方程为:
X(k+1)=ΦX(k)+Γμ(k)
Z(k)=HX(k)+v(k)

式中,μ、ν为零均值的过程噪声和观测噪声;T为采用周期。目标跟踪系统大部分都为非线性系统,非线性系统离散动态方程为:
X(k+1)=f[k,X(k)]+G(k)W(k)
Z(k)=h[k,X(k)]+V(k)
X(k)=ΦX(k-1)+Γμ(k)
μ(k)的均方差Q=w*diag([1,1]),w为一个可调节的参数。v(k)的均方差R=5。状态方程为线性,由于观测方程为非线性,则需要求其雅阁比矩阵,即:

假定目标在室内二维平面上运动,初始位置为(10 m,10 m),水平运动速度为2 m,垂直运动速度也为2 m,假设部署10个AP,利用WiFi指纹定位方法进行跟踪,扩展卡尔曼滤波模拟实验如图2所示,观测样本总数为40个,扫描周期为T=1 s,观测噪声均值为0,方差为10 m。
算法首先利用非线性函数将非线性模型局部化,扩展Kalamn滤波将非线性函数做一阶泰勒公式展开,得到线性化的系统方程,完成对目标滤波估计。本算法部分代码如下:
for t=2:N
X(:,t)=F*X(:,t-1)+G*sqrtm(Q)*randn(2,1);%目标真实轨迹
end
⋮
%求雅阁比矩阵H
H=[-(Xn(3,1)-y0)/D,0,(Xn(1,1)-x0)/D,0];%一阶近似
K=P1*H'*inv(H*P1*H'+R);%增益
Xekf(:,i)=Xn+K*(Z(:,i)-dd);%状态更新
P0=(eye(4)-K*H)*P1;%滤波误差协方差更新
end
%误差分析
从图2可以看出,未滤波时,系统采用WiFi指纹估算的位置与真实位置相差较远,滤波前最大相差距离达到3.5 m,滤波后估算跟踪轨迹基本沿着真实轨迹运行,基本维持在小于0.5 m的误差范围内,最大误差也只有1.5 m,很大程度上提高了系统的定位精度。


3 实验结果与分析
3.1 实验环境
室内定位实验场地在皖西学院信息工程学院办公楼5楼,长约60 m,宽8 m的半层楼面,共布置了17个AP,使用的都是国内常用的路由器D-Link,AP的型号为DIR-629,其中502实验室布置5个AP,隔壁504布置6个AP,走廊布置8个AP,服务器放置在502实验室,每个AP之间都相隔一段距离。
实验实时跟踪路径如图3所示,共采样200个点,每个采样点之间的距离为1.5 m左右,每个采样点采样的时间为5 s。
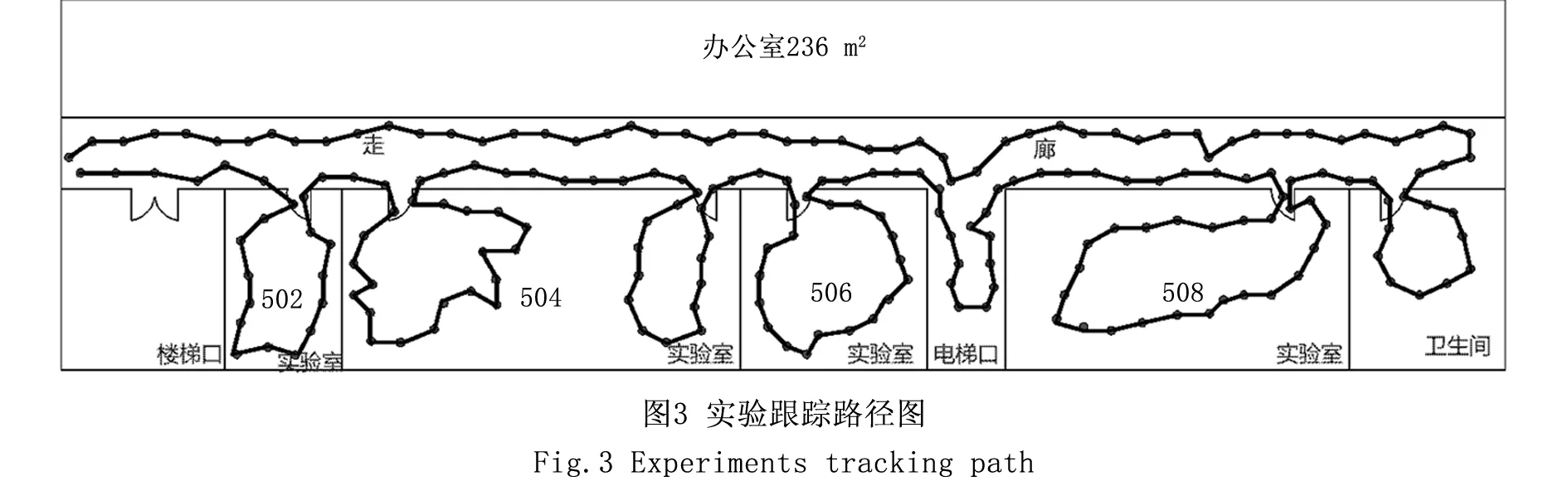
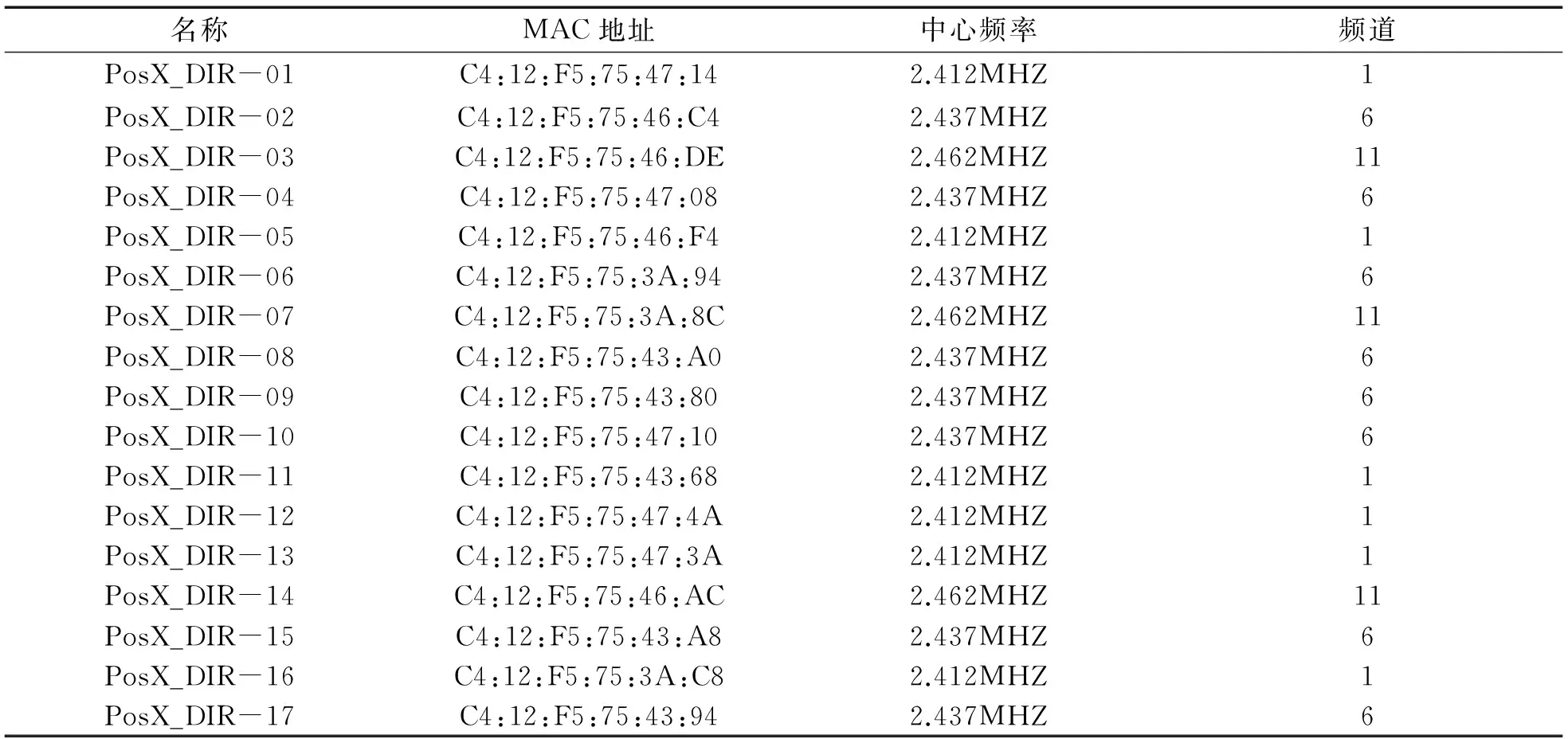
表1 实验AP参数
实验场地的AP名称、MAC地址、中心频率和频道如表1所示。
3.2 实验结果分析
根据以上实验环境,实时跟踪定位主要采用基于WiFi指纹定位算法,利用概率性方法建模特定位置上每一个AP的信号强度特征,再采用扩展卡尔曼滤波算法对采样阶段的RSSI信号进行滤波,然后利用滤波后的RSSI指纹信号进行定位跟踪。从实时跟踪路径结果可以看出,跟踪精度很高,基本能够实现实时跟踪,当目标穿越门时候,有时候会出现一些很微小的误差。根据实验结果可以拟合出运动在X和Y方向上的误差曲线,如图4所示。由误差曲线可以看出,实时跟踪只有在很少采样点的位置上有较大的误差,大部分采样点误差都在零值附近有很小的波动。由此可以看出采用扩展卡尔曼滤波算法进行滤波后,基本可以对目标进行实时、准确地跟踪。

4 结论
采用扩展卡尔曼滤波算法后的目标定位精度与滤波前有了明显的提高,跟踪精度也改善明显,提高了室内定位系统的定位精度。实时跟踪只在很少采样点的位置上有较大的误差,大部分采样点误差都在零值附近有很小的波动。由此可以看出采用扩展卡尔曼滤波算法进行滤波后,基本可以对目标进行实时、准确地跟踪。
[1]LIU H,GAN Y,YANG J,et al.Push the Limit of WiFi Based Localization for Smartphones[C]∥Proceedings of ACM MobiCom,2012:305-316.
[2]MAUTZ R,TILCH S.Rvey of optical indoor positioning systems[C]∥Proceedings of IEEE IPIN, 2011.
[3]HILSENBECK S,BOBKOV D,SCHROTH G,et al.Based data fusion of pedometer and WiFi measurements for mobile indoor positioning[C]∥Proceedings of ACM UBICOMP,2014.
[4]曾 钰,林 都.基于伪线性 KF和EKF的无源定位算法研究[J].中北大学学报:自然科学版,2011,32(2):174-178.
[5]刘盼红.基于粒子群优化算法的Hadoop调度算法研究[J].河北工程大学学报:自然科学版,2015,32(1):83-85.
[6]OLAMA M M,DJOUADI S M,PAPAGEORGIOU I G,et al.Position and velocity tracking in mobile networks using particle and Kalman filtering with comparison[J].IEEE Transactions on Vehicular Technology,2008,57(2):1001-1010.
[7]谢先明.结合滤波算法的不敏卡尔曼滤波器相位解缠方法[J].测绘学报,2014,43(7):739-745.
[8]杨 铮,吴陈沭.位置计算:无线网络定位与可定位性[M].北京:清华大学出版社,2014.
[9]LI L, SHEN G, ZHAO C,et al.Experiencing and handling the diversity in data density and environmental locality in an indoor positioning service[C]∥Proceedings of ACM MobiCom,2014:459-470.
[10]ZHOU Q Y,KOLTUN V.Simultneous locatization and calibration:self-calibration of consumer depth cameras[C]∥Proceedings of the IEEE CVPR,2014: 454-460.
(责任编辑王利君)
Wireless indoor positioning system based on extended Kalman filtering algorithm
LING Haibo ,ZHOU Xiancun
(College of Information Engineering, West Anhui University, Anhui Lu’an 237012 , China)
An indoor the real-time positioning technology based on Extended Kalman Filtering(EKF) algorithm is proposed to solve the problem that the forecasted position error is larger. Systems based on fingerprint positioning WiFi signal, and the Kalman filter is used to filter the forecasted location in order to improve the accuracy of WiFi fingerprinting positioning method, to achieve real-time tracking of the target. The simulation and experimental results illustrate that method improves the positioning precision, can better fulfil requirements of indoor positioning.
wireless LAN;indoor positioning;EKF; real-time trackin
2016-03-30
国家自然科学基金资助项目(61572366,61303209);皖西学院校级项目(WXZR1503,WXZR1524)
凌海波(1989-),男,安徽庐江人,硕士,助教,研究领域为无线传感器网络、无线室内定位。
1673-9469(2016)02-0108-05
10.3969/j.issn.1673-9469.2016.02.024
TP301.6
A
