电励磁同步电机惯性储能直流馈电系统新型单位功率因数控制
2016-09-06史黎明李耀华
刘 洋 史黎明 赵 鲁 李耀华
(1.中国科学院电力电子与电气驱动重点实验室(中国科学院电工研究所) 北京 100190 2.中国科学院大学 北京 100190)
电励磁同步电机惯性储能直流馈电系统新型单位功率因数控制
刘洋1,2史黎明1赵鲁1李耀华1
(1.中国科学院电力电子与电气驱动重点实验室(中国科学院电工研究所) 北京100190 2.中国科学院大学北京100190)
电励磁同步电机惯性储能直流馈电系统中,同步电机存在定子磁链幅值、功率因数和直流母线电压3个控制自由度。为减少系统的无功功率,并提高系统的效率,需控制直流母线电压基本恒定以及提高系统的功率因数。该文从上述两个控制需求出发,提出一种电励磁同步电机新型单位功率因数控制方法,该方法采用转子磁场定向,对功率因数和直流母线电压进行闭环控制,将三自由度降为二自由度。仿真计算和在电励磁同步电机惯性储能系统平台上的实验结果表明,与传统的电机直轴电流为零的控制方法相比,该文提出的方法在保证直流母线电压基本恒定的同时,使同步电机的功率因数提高至0.97,视在功率减少28%,可有效减少系统无功功率。
同步电机惯性储能电励磁磁场定向控制单位功率因数
0 引言
近年来,电励磁同步电机(Excited SynchronousMotor,ESM)惯性储能直流馈电系统由于储能密度高、功率密度大、循环寿命长以及功率因数可控等优点[1-4],在大功率场合得到广泛应用,如脉冲功率电源[5]、微网[6-8]、风力发电系统[9,10]等。
惯性储能直流馈电系统的基本要求是维持基本恒定的直流母线电压以及快速输出负载所需电功率。系统在释放能量过程中,同步电机工作在发电状态,转速下降,同步电机端电压的幅值和频率也在变化。同时,直流电压也随负载而变化。对于变负载的同步电机直流馈电系统,稳定直流电压的方法主要有两大类:一是同步电机输出端不稳压,但直流端稳压,称为单端口稳压;另一种是同步电机输出端基本稳压,且直流端也稳压,称为双端口稳压[3]。单端口稳压一般采用晶闸管可控整流或二极管不可控整流带DC-DC变换器方式[11],由于仅在直流端稳压,同步电机很难在较宽的转速范围内稳定运行。另外,单端口稳压方法中一般需要较大的直流滤波环节。双端口稳压通过调节气隙磁场,在变负载情况下维持电机输出端电压基本稳定,同时采用不可控整流带DC-DC变换器实现直流侧稳压,或直接采用全功率型PWM整流器实现高品质直流馈电[12-15]。
同步电机惯性储能直流馈电系统在大功率场合,单位功率因数运行可减小变流器运行容量,降低成本,提高系统储能密度。文献[16]在直驱隐极永磁同步风力发电机控制系统中,根据测量得到的磁极位置角度和定子电流幅值,利用定子电感和永磁体磁链参数,计算出定子磁链位置角度,按定子磁链定向控制电机的功率因数。但风力发电系统中一般采用最佳风能捕捉方案,即控制外环为永磁同步电机的有功功率环而非直流电压环,直流环节稳压的任务交由背靠背并网逆变器完成。另外,相比于永磁同步电机的转子固定励磁,电励磁同步电机在磁场调节、电机端稳压的控制更加灵活多样。
由于励磁环节可控,电励磁同步电机控制上存在定子磁链、功率因数、直流母线电压(或电机转速、有功功率等外环控制量)[17,18]3个自由度。文献[17]采用双磁场定向控制,在定子磁场定向坐标系下完成定子磁链、功率因数控制,并综合这二者计算出励磁电流参考值;之后通过坐标变换,将定子直轴电流、转速外环输出的定子交轴电流参考值变换到转子磁场定向坐标系下d、q轴电流参考值,再经PI控制器闭环调节完成对转速的控制。文献[19]同样对电励磁同步电机完成了上述3个自由度的控制,只是全部控制过程都在气隙磁场定向坐标系下完成。
本文从保证系统直流馈电电压稳定以及减少系统无功功率角度出发,对传统电励磁同步电机矢量控制方法进行改进,采用直流母线电压和功率因数闭环控制,将三自由度降为二自由度,并在转子磁场定向坐标系下完成控制,形成一种适合惯性储能直流馈电系统的电励磁同步电机新型单位功率因数控制。
1 惯性储能直流馈电系统数学模型
图1为电励磁同步电机惯性储能直流馈电系统结构简图。由于电机漏感通常较小,一般在回路中串入泵升电感Lp以提高母线电压达到需要的值。系统在储能阶段,三相PWM整流/逆变器(CV)工作模式为逆变,在电能释放阶段为PWM整流,由开关S1、S2控制两个阶段的切换。

图1 同步电机惯性储能直流馈电系统框图Fig.1 Block diagram of ESM based inertia wheel energy storage system
将电励磁同步电机等效为定子感应电动势es与定子电阻Rs的串联,其与泵升电感Lp、CV电路、直流侧电容C一起组成电压型PWM整流器,如图2所示。

图2 同步电机直流馈电系统等效图Fig.2 Equivalent diagram of ESM based inertia wheel energy storage system
由开关函数sk描述的PWM整流器模型为

式中,当上桥臂导通、下桥臂关断时sk=1,反之sk= 0,k=a,b,c。
2 同步电机新型单位功率因数控制
同步电机电能释放过程是同步电机惯性储能直流馈电系统的关键,此时同步电机一直处于动态发电过程中,因此对电机控制的动态性能要求很高。本文采用以下方法进行控制:①采用功率因数和转速的闭环控制;②采用转子磁场定向控制。
电励磁同步电机采用定子磁场定向或气隙磁场定向方法,需要准确观测定子或气隙磁链,而磁链观测器易受电机参数、温度及磁饱和程度变化的影响。在定子磁链幅值、功率因数、直流电压3个自由度中,后两者是直流馈电系统最基本的要求。省略定子磁链闭环控制,可降低系统控制复杂度,在更宽的电机转速范围内增加系统稳定性及可靠性。通过在电机轴端安装高分辨率绝对式编码器,可精确获得转子磁场位置信息,且不受电机参数变化影响,因此可提高系统的动态性能。
2.1励磁侧控制
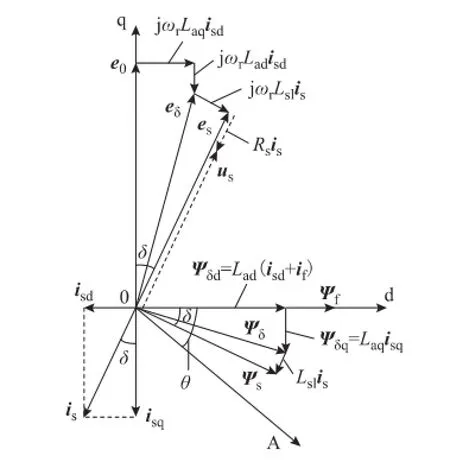
图3 同步电机单位功率因数发电状态矢量图Fig.3 Vector diagram of ESM in generating state with unity power factor
在图3中,按电动机惯例,磁链滞后于感应电动势90°。以控制同步电机发电状态定子感应电动势矢量es与相电流矢量is反向为目标来控制励磁电流,即可达到同步电机单位功率因数运行。由图3推导可得

式中,if为励磁电流;Lsl为定子漏感;Lad、Laq分别为d、q轴励磁电感;δ为空载感应电动势e0与定子电压us两矢量间的夹角。


式中,Lsd、Lsq分别为 d、q轴同步电感,Lsd=Lad+ Ls1,Lsq=Laq+Lsl。
按照式(3)计算出励磁电流给定值i*f,通过闭环调节,从而控制同步电机单位功率因数运行。
2.2定子电枢侧控制

图4中,控制系统由直流母线电压外环、同步电机电枢相电流内环和励磁电流环构成。




图4 同步电机新型单位功率因数控制框图Fig.4 Block diagram of a novel unity power factor control for ESM
3 仿真与实验
3.1仿真结果
1)仿真工况与参数
仿真工况如图1所示。仿真开始前,系统已储能完毕,同步电机具有稳定的初始转速;将开关S1断开,S2闭合,系统开始运行,同步电机将惯性储能转换为电能,向负载输出有功功率,同时维持直流母线电压基本恒定。
仿真设置同步电机初始转速为1 500 r/min,直流母线电压参考值680 V,同步电机载波频率4 kHz,励磁载波频率16 kHz。电机参数如表1所示。

表1 电励磁同步电机参数Tab.1 ESM parameter
2)仿真波形与分析
仿真中,同步电机从1.2 s开始向直流侧负载馈电。图5为负载的有功功率曲线,其峰值达到413 kW。图6为同步电机d、q轴电流仿真波形,二者分别反向增加至-158 A和-802 A,其中负号表示此时同步电机处于发电状态,电流矢量反向。

图5 负载有功功率仿真波形Fig.5 Simulation of load active power

图6 同步电机d、q轴电流仿真波形Fig.6 Simulation of d-,q-axis current in ESM
图7为直流母线电压参考值、实际值和同步电机转速波形。同步电机转速由1 500 r/min降至1 246 r/min,直流母线电压由680 V降至约600 V。直流母线电压略有跌落的主要原因是负载功率变化剧烈,而控制系统的闭环调节需要一定的响应时间,再加上数字控制的固有延迟,使同步电机输出功率略滞后于负载需求,但输出负载功率整体上升平稳。

图7 直流母线电压、同步电机转速仿真波形Fig.7 Simulation of DC-link voltage and ESM speed


图8 同步电机励磁电压及励磁电流仿真波形Fig.8 Simulation of field voltage and current in ESM
在相同负载情况下,分别采用本文提出的新型单位功率因数控制方法及传统isd=0控制方法,仿真得到同步电机a相电压及电流波形如图9所示,图中电流波形显示时均取反。
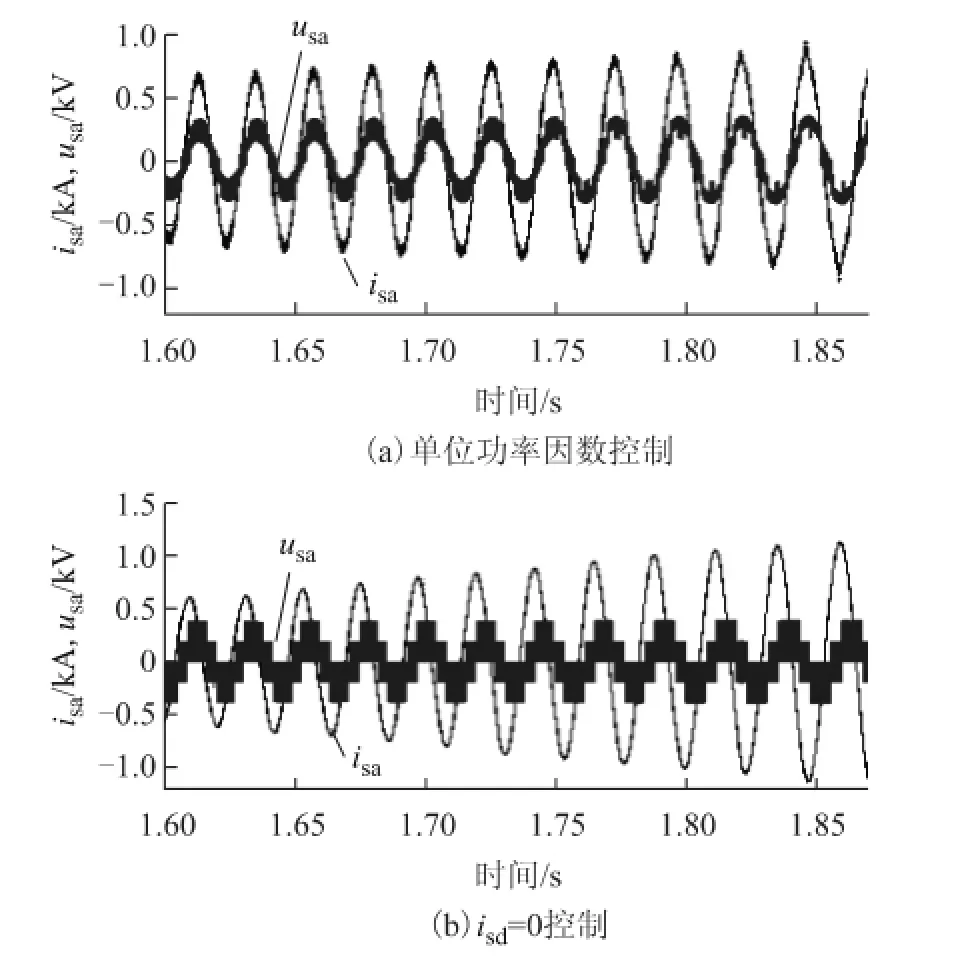
图9 两种控制方法下同步电机a相电压及电流仿真波形Fig.9 Simulation of phase a voltage and current in ESM under two control schemes
图9a中,电压、电流相位基本相同,电机以单位功率因数运行;图9b中,二者之间存在一定的相位差。
根据图9a和图9b,分别计算出同步电机的有功功率、视在功率和功率因数,结果如表2所示。可见,采用本文提出的方法,同步电机功率因数显著提高,视在功率有效减少。

表2 有功功率、视在功率和功率因数对比计算结果Tab.2 Calculated active,apparent power and power factor
3.2实验结果
图10为负载有功功率实验波形,其峰值达到400 kW左右。
图11为同步电机直流馈电过程d、q轴电流isd、isq及转速nr的实验波形。随着负载功率逐渐增加,同步电机转速从1 500 r/min降至1 200 r/min左右;直轴电流isd增至-210 A左右,交轴电流isq增至-800 A左右。

图10 负载有功功率实验波形Fig.10 Experimental result of load active power
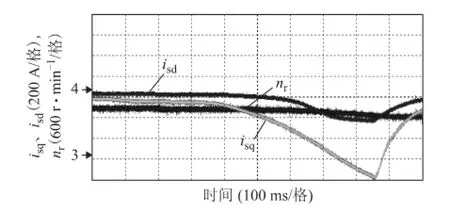
图11 同步电机d、q轴电流及转速实验波形Fig.11 Experimental results of d-,q-axis current and speed in ESM
图12为同步电机励磁电压uf与励磁电流if实验波形。与仿真中所述情况相同,当同步电机d轴电流isd>40 A时投入单位功率因数控制。
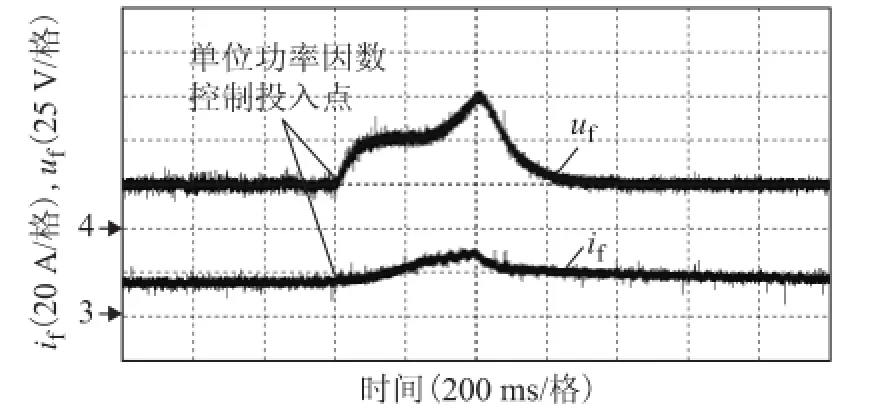
图12 同步电机励磁电压与励磁电流实验波形Fig.12 Experimental results of field voltage and current in ESM
图13为直流母线电压udc与同步电机a相电流isa实验波形。与仿真情况类似,由于负载有功功率变化剧烈,实验中直流母线电压略有跌落。

图13 直流母线电压与同步电机a相电流实验波形Fig.13 Experimental results of DC-link voltage and phase a current in ESM
在相同的负载情况下,分别采用本文提出的新型单位功率因数控制及传统isd=0控制进行对比实验,得到同步电机a相电压及电流波形如图14所示,图中电流波形显示时均取反。
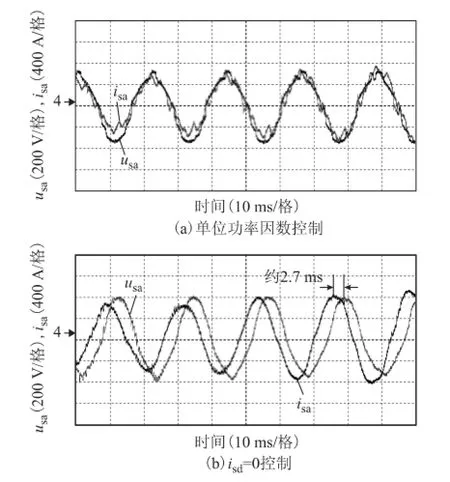
图14 两种控制方法下同步电机a相电压、电流试验波形Fig.14 Experimental results of phase a voltage and current in ESM under two control schemes
图14a中,相电压、电流相位基本相同;图14b中二者相位相差约2.7 ms,电流与电压周期约为22 ms,即isa超前usa约44°,此时功率因数为0.72。因为isa显示取反,所以实际上usa超前isa约136°,这表示此时同步电机向直流侧负载传输有功及感性无功功率。
表3为采用两种控制方法测得的实验数据比较。可以看出,相比于isd=0控制方法,本文提出的新型单位功率因数控制方法将同步电机功率因数提高至0.97,系统视在功率减少28%。

表3 有功功率、视在功率和功率因数实验数据计算结果Tab.3 Experimental results of calculated active,apparent power and power factor
4 结论
本文提出了一种适合大功率电励磁同步电机惯性储能直流馈电系统的新型单位功率因数控制方法。对直流母线电压及功率因数进行闭环控制,降低了系统控制自由度。在转子磁场定向坐标系下实施控制,将电压型PWM整流器的电流控制与同步电机控制相结合,即通过三相电流闭环控制,实现了同步电机单位功率因数运行。与传统isd=0控制方法对比结果表明,采用本文提出的新方法,同步电机的视在功率大幅降低,系统无功功率得到有效减少。
[1]戴兴建,邓占峰,刘刚,等.大容量先进飞轮储能电源技术发展状况[J].电工技术学报,2011,26(7):133-140. DaiXingjian,DengZhanfeng,LiuGang,etal. Review on advanced flywheel energy storage system with large scale[J].Transactions of China Electrotechnical Society,2011,26(7):133-140.
[2]张维煜,朱誯秋.飞轮储能关键技术及其发展现状[J].电工技术学报,2011,26(7):141-146. Zhang Weiyu,Zhu Huangqiu.Key technologies and development status of flywheel energy storage system[J]. Transactions of China Electrotechnical Society,2011,26(7):141-146.
[3]沈建新,缪冬敏.变速永磁同步发电机系统及控制策略[J].电工技术学报,2013,28(3):1-8. Shen Jianxin,Miao Dongmin.Variable speed permanent magnetsynchronousgeneratorsystemsandcontrol strategies[J].Transactions of China Electrotechnical Society,2013,28(3):1-8.
[4]戴兴建,于涵,李奕良.飞轮储能系统充放电效率实验研究[J].电工技术学报,2009,24(3):20-24. Dai Xingjian,Yu Han,Li Yiliang.Efficient test on the charging and discharging of the flywheel energy storage system[J].TransactionsofChinaElectrotechnical Society,2009,24(3):20-24.
[5]Swett D W,Blanche J.Hi-voltage flywheel charging module forcapacitorbanksusedinpulsedpower applications[C]//14th IEEE International Pulsed Power Conference,Dallas,TX,2003,2:1441-1444.
[6]黄宇淇,方宾义,孙锦枫.飞轮储能系统应用于微网的仿真研究[J].电力系统保护与控制,2011,39(9):83-87,113. Huang Yuqi,FangBinyi,SunJinfeng.Simulation research on the microgrid with flywheel energy storage system[J].Power System Protection and Control,2011,39(9):83-87,113.
[7]余涛,梁海华,周斌.基于R(λ)学习的孤岛微电网智能发电控制[J].电力系统保护与控制,2012,40(13):7-13. YuTao,LiangHaihua,ZhouBin.Smartpower generation control for microgrids islanded operation based on R(λ)learning[J].Power System Protection and Control,2012,40(13):7-13.
[8]周林,黄勇,郭珂,等.微电网储能技术研究综述[J].电力系统保护与控制,2011,39(7):147-152. Zhou Lin,Huang Yong,Guo Ke,et al.A survey of energy storage technology for micro grid[J].Power System Protection and Control,2011,39(7):147-152.
[9]刘世林,孙海顺,顾明磊,等.一种新型风力发电机与飞轮储能联合系统的并网运行控制[J].电工技术学报,2012,27(4):248-254. Liu Shilin,Sun Haishun,Gu Minglei,et al.Novel structure and operation control of a flywheel energy storage system associated to wind generator connected to power grid[J].Transactions of China Electrotechnical Society,2012,27(4):248-254.
[10] 胡雪松,孙才新,刘刃,等.采用飞轮储能的永磁直驱风电机组有功平滑控制策略[J].电力系统自动化,2010,34(13):79-83. Hu Xuesong,Sun Caixin,Liu Ren,et al.An active power smoothing strategy for direct-driven permanent magnet synchronous generator based wind turbine using flywheelenergystorage[J].AutomationofElectric Power Systems,2010,34(13):79-83.
[11] 傅捷,刘刚.磁悬浮飞轮储能发电运行前馈-反馈控制器设计[J].航空精密制造技术,2012,48(1):30-33. Fu Jie,LiuGang.Designoffeedforward-feedback controller for discharging system of magnetic suspended flywheelenergystorage[J].AviationPrecision Manufacturing Technology,2012,48(1):30-33.
[12] 刘学,姜新建,张超平,等.大容量飞轮储能系统优化控制策略[J].电工技术学报,2014,29(3):76-82. LiuXue,JiangXinjian,ZhangChaoping,etal. Optimization control strategies of large capacity flywheel energystoragesystem[J].TransactionsofChina Electrotechnical Society,2014,29(3):76-82.
[13] 杜玉亮,郑琼林,郭希铮,等.飞轮储能系统反向制动发电问题研究[J].电工技术学报,2013,28(7):157-162,176. Du Yuliang,Trillion Q,Guo Xizheng,et al.Research on problem of regenerative braking process of flywheel energystoragesystem[J].TransactionsofChina Electrotechnical Society,2013,28(7):157-162,176.
[14] 杜玉亮,郑琼林,郭希铮,等.飞轮储能系统弱磁控制研究[J].电力电子技术,2013,47(9):60-62. Du Yuliang,Trillion Q,Guo Xizheng,et al.Researchon flux-weakening control of flywheel energy storage system[J].Power Electronics,2013,47(9):60-62.
[15]郭伟,王跃,李宁.永磁同步电机飞轮储能系统充放电控制策略[J].西安交通大学学报,2014,48(10):60-65. Guo Wei,Wang Yue,Li Ning.Control strategy for flywheel energy storage system with permanent magnet synchronous machine[J].Journal of Xi’an Jiaotong University,2014,48(10):60-65.
[16]姚骏,廖勇,李辉,等.直驱永磁同步风力发电机单位功率因数控制[J].电机与控制学报,2010,14(6):13-20. Yao Jun,Liao Yong,Li Hui,et al.Unity power factor control of a direct-driven permanent magnet synchronous wind-power generator[J].Electric Machines and Control,2010,14(6):13-20.
[17]Szabo C,Imecs M,Incze I I.Double-field orientation of unity power factor synchronous motor drive[C]//14th InternationalConferenceonIntelligentEngineering Systems(INES),Las Palmas,Spain,2010:237-242.
[18]Szabo C,Imecs M,Incze I I.Vector control of the synchronous motor operating at unity power factor[C]// 11th International Conference on Optimization of Electrical and Electronic Equipment,Brasov,2008:15-20.
[19] 李崇坚.交流同步电机调速系统[M].北京:科学出版社,2006.
A Novel Unity Power Factor Control of Electrically Excited Synchronous Motor in an Inertia Wheel Energy Storage System
Liu Yang1,2Shi Liming1Zhao Lu1Li Yaohua1
(1.Key Laboratory of Power Electronics and Electric DriveInstitute of Electrical Engineering Chinese Academy of ScienceBeijing100190China 2.University of Chinese Academy of ScienceBeijing100190China)
In the electrically excited synchronous motor(ESM)based inertia wheel energy storage DC supply system,there are three degrees of freedom from the control consideration,i.e.the stator flux,the power factor,and the DC-link voltage.To reduce the system reactive power and increase the efficiency,the DC-link voltage should be stabilized and the power factor should be increased.In this paper,a novel unity power factor control scheme for ESM is proposed,in which we degrade the control freedom and perform the close-loop control on power factor and DC-link voltage in a rotor-oriented reference frame.Simulation and experiment carried out in an inertia wheel energy storage system show that,compared with the traditional isd=0 scheme,the proposed scheme increases the power factor to 0.97,and realizes a 28%down of the apparent power,which effectively reduces the system reactive power.
Synchronous motor,flywheel inertia wheel energy storage,electrically excited,field-oriented control,unity power factor
TM315
“十二五”国家科技支撑计划重大项目资助(2013BAG19B00-04-01)。
2015-01-14改稿日期 2015-11-10
刘洋男,1983年生,博士研究生,研究方向为同步电机驱动、惯性储能系统及控制。
E-mail:13810345862@139.com
史黎明男,1964年生,研究员,博士生导师,研究方向为特种电机和驱动控制、新型轨道交通牵引供电、电能无线传输技术。
E-mail:limings@mail.iee.ac.cn(通信作者)
