基于物理检测方式的胶轮车运输监控系统
2016-09-06佘九华陈小林张明杰
佘九华, 陈小林, 张明杰
(1.天地(常州)自动化股份有限公司, 江苏 常州 213015;2.中煤科工集团常州研究院有限公司, 江苏 常州 213015)
基于物理检测方式的胶轮车运输监控系统
佘九华1,2,陈小林1,2,张明杰1,2
(1.天地(常州)自动化股份有限公司, 江苏 常州213015;2.中煤科工集团常州研究院有限公司, 江苏 常州213015)
针对基于射频识别技术的胶轮车运输监控系统建设投入高、维护量大、不适应某些矿区需求等问题,提出了一种基于物理检测方式对井下车辆进行定位的胶轮车运输监控系统,介绍了系统总体架构、胶轮车判定方法、系统控制逻辑等。应用结果表明,该系统能够有效识别胶轮车位置,较基于射频识别技术的胶轮车运输监控系统安装及维护更加简便。
胶轮车; 运输监控; 物理检测; 车辆定位
网络出版地址:http://www.cnki.net/kcms/detail/32.1627.TP.20160429.1113.002.html
0 引言
辅助运输系统作为矿井运输系统的补充,承担矿井的人员、物料、设备以及部分煤炭运输任务。其中胶轮车因其运输灵活、运输效率高等特点而得到越来越多的应用,以神东矿区为代表的大型矿井都采用胶轮车运送人员、物料及设备[1]。然而胶轮车行驶巷道有时狭窄、交叉点多,给行车造成很大困难,尤其是使用胶轮车较多的矿井,迫切需要对胶轮车进行有效的运输监控,避免碰头、追尾等事故的发生。
实现胶轮车运输监控最重要的是要实时准确地检测出胶轮车位置。现有的胶轮车运输监控系统大多采用2.4 GHz射频技术实现胶轮车的区域定位,车辆识别范围较大,当避让硐室较密集时,射频信号重叠,容易造成位置识别错误[2]。另外,采用射频技术时,需要在巷道内安装大量的位置识别标志器,位置识别标志器通过线缆与监控分站连接,增加了工程施工及后期维护难度,不利于胶轮车运输监控系统的推广。本文提出一种基于物理检测方式的胶轮车运输监控系统。该系统采用检测地磁变化的机车位置传感器或检测巷道高度变化的超声波物位传感器获得车辆出入列信息,车辆调度控制分站根据车辆信息进行控制逻辑计算,然后对信号灯进行控制。
1 系统总体架构
基于物理检测方式的胶轮车运输监控系统由车辆调度控制分站、机车位置传感器或超声波物位传感器、信号灯等组成,如图1所示。在单行巷道的每个入口处布置由1台车辆调度控制分站、1台信号灯、4台传感器等组成的监控设备,直行巷道的2个入口处分别布置1台车辆调度控制分站,多岔道情况下布置2台以上车辆调度控制分站。控制入口处布置的所有车辆调度控制分站组成1组,组内的车辆调度控制分站之间存在主站与从站的逻辑关系。从站负责将采集到的车辆出入列信息通过CAN总线传输给主站,同时接收主站传来的信号灯控制命令,根据该命令控制信号灯,并上传信号灯状态信息、传感器状态信息;主站负责收集自身采集的车辆出入列信息、从站上传的车辆出入列信息,根据获取的车辆出入列信息执行逻辑决策,生成信号灯控制命令控制本地信号灯以及向从站发送信号灯控制命令,同时上传本地信号灯状态信息、本地传感器状态信息。系统软件通过网络获取井下设备监测、控制信息,并对井下设备进行远程管理。
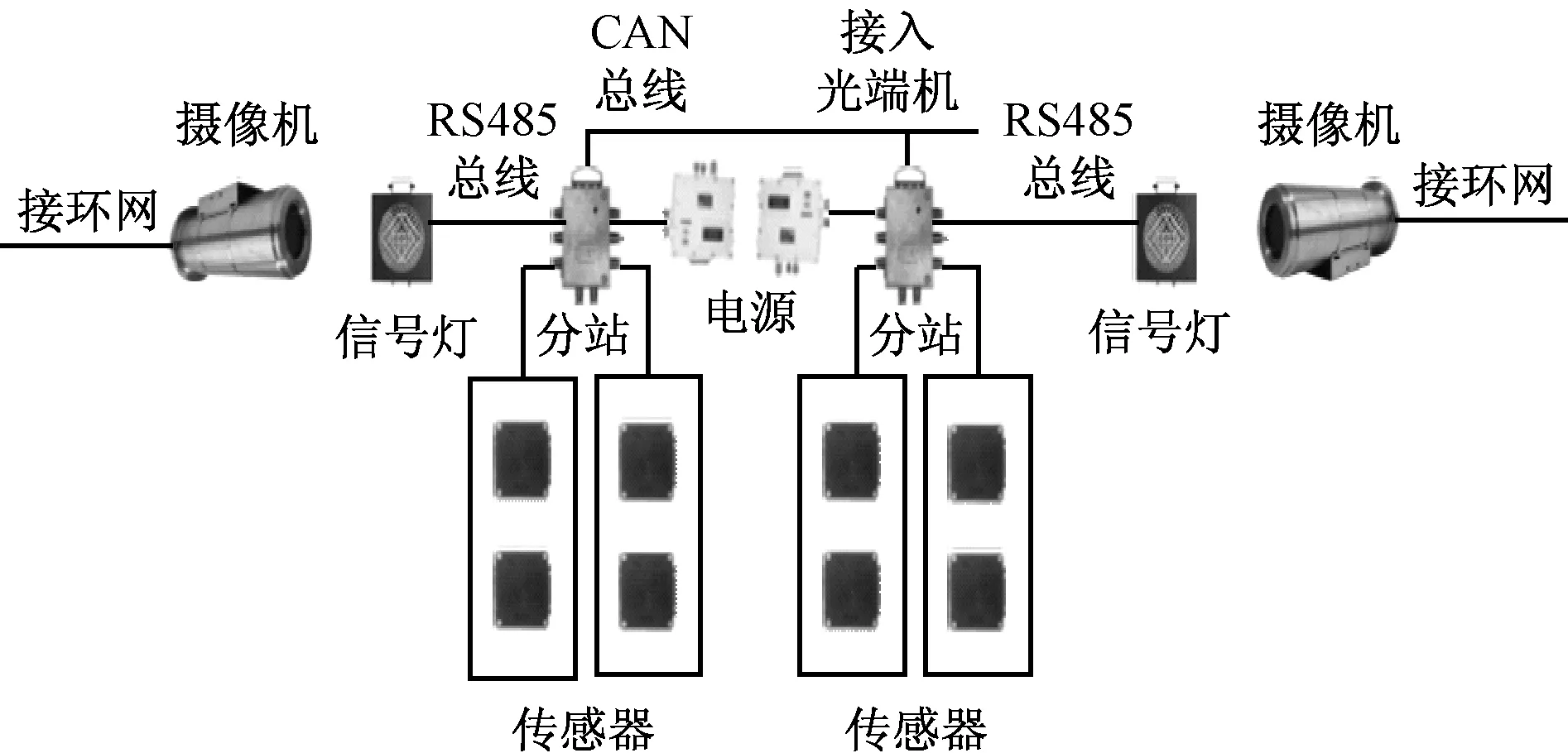
图1 基于物理检测方式的胶轮车运输监控系统组成
若系统增加车辆闯红灯视频监控与取证功能,则需在每个单行巷道入口的信号灯前方布置1台网络摄像机并通过光纤接入环网。系统软件预录视频,根据车辆调度控制分站上报的车辆闯红灯监测情况截取视频,并将该段视频与闯红灯查询关联。当系统软件配备车牌识别分析模块时,可自动分析出闯红灯车辆牌号,并与闯红灯查询关联。
2 胶轮车判定方法
系统采用机车位置传感器或超声波物位传感器获取胶轮车位置[3]。机车位置传感器测量地磁场强度并以频率信号输出,超声波物位传感器利用超声波测量距离并以频率信号输出[4]。当有车辆经过传感器时,传感器的输出频率会发生变化,车辆调度控制分站检测频率信号的变化,捕获车辆经过的事件,并通过检测车辆经过前后2组传感器产生时间的顺序判断是否有车辆经过,避免其他移动物体经过造成车辆通过的假象。由于每台传感器的检测范围有限,为了适应较宽巷道应用,通过传感器冗余方式来增大检测面积。车辆调度控制分站检测车辆经过过程如图2所示。T1为1号、2号传感器位置的车辆经过状态,T1=0代表1号、2号传感器位置无车辆到达,T1=1代表1号、2号传感器位置有车辆到达;T2为3号、4号传感器位置的车辆经过状态,T2=0代表3号、4号传感器位置无车辆到达,T2=1代表3号、4号传感器位置有车辆到达。胶轮车判定逻辑见表1,其包含了判定车辆及小物体干扰的所有方法。

图2 车辆调度控制分站检测车辆经过过程
3 系统控制逻辑
系统设计了2种信号灯控制方式:分站自动控制和上位机手动控制。分站自动控制是指车辆调度控制分站依据由传感器获得的车辆数量、方向等信息进行决策,并直接控制信号灯,实现自动调度控制功能;上位机手动控制是指系统软件通过系统总线下达控制命令到井下车辆调度控制分站,实现信号灯的手动控制。系统通常情况下运行于分站自动控制模式下,井下有特殊要求时进行上位机手动控制。
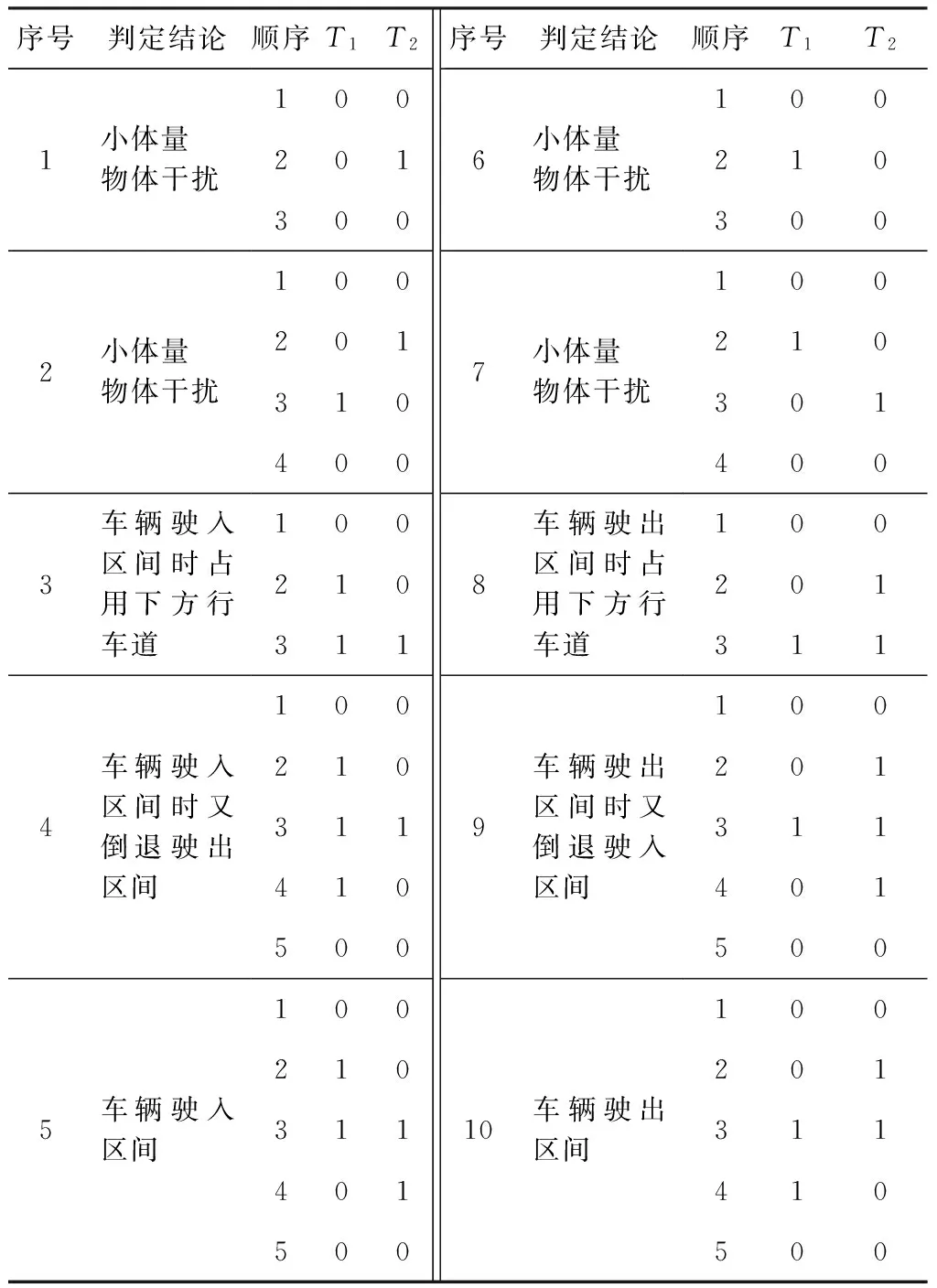
表1 胶轮车判定逻辑
系统控制逻辑按照设定的控制区域特点进行分析,单向区间只分析车辆数量,双向区间分析车辆数量和方向并进行敌对闭锁,丁字形、十字形交叉路口形成的多向区间分析车辆的数量和方向、各个方向的信号灯互为敌对。为便于系统维护,将传感器通信状态及车辆调度控制分站主传输状态纳入控制逻辑判断中,通过信号灯不同的图案显示不同的故障类型。
4 结语
基于物理检测方式的胶轮车运输监控系统已在郭家湾煤矿应用。实践表明,该系统可通过物理检测方式有效识别胶轮车位置,为矿井胶轮车辅助运输提供可靠的避车信号。与传统基于射频方式的胶轮车运输监控系统相比,该系统减少了大量线缆的应用,安装及维护更加方便。
[1]赵立厂.矿井胶轮车运输信号系统的分布式架构设计[J].工矿自动化,2012,38(9):101-103.
[2]郭海军,续芳.煤矿无轨胶轮车监控调度系统设计[J].工矿自动化,2013,39(4):9-12.
[3]祝国源.基于地磁感应的矿用机车位置检测传感器的研究[J].工矿自动化,2010,36(6):8-11.
[4]万纯.基于矿用型机车位置传感器的设计与实现[J].电子世界,2014(14):233.
Rubber-tyred vehicle transport monitoring system based on physical detection mode
SHE Jiuhua1,2,CHEN Xiaolin1,2,ZHANG Mingjie1,2
(1.Tiandi (Changzhou) Automation Co., Ltd., Changzhou 213015, China; 2.CCTEG Changzhou Research Institute, Changzhou 213015, China)
For problems of huge construction cost and maintenance and inability of meeting requirements of some mining areas existed in rubber-tyred vehicle transport monitoring system based on radio frequency identification technology, a rubber-tyred vehicle transport monitoring system based on physical detection mode was proposed. Overall framework of the system, rubber-tyred vehicle identification method and the system control logic were introduced. The application shows the system can identify location of rubber-tyred vehicle and has more convenient setting and maintenance than the one based on radio frequency identification technology.
rubber-tyred vehicle; transport monitoring; physical detection; vehicle location
1671-251X(2016)05-0009-03
10.13272/j.issn.1671-251x.2016.05.002
2015-12-22;
2016-03-03;责任编辑:李明。
江苏省科技成果转化专项资金项目(2014ZX001)。
佘九华(1982-),男,山东临沂人,工程师,现主要从事煤矿安全监控系统软件开发工作,E-mail:463290951@qq.com。
TD525/67
A网络出版时间:2016-04-29 11:13
佘九华,陈小林,张明杰.基于物理检测方式的胶轮车运输监控系统[J].工矿自动化,2016,42(5):9-11.