基于CAN 总线多主通信技术的监控分站设计
2020-07-27宋益东
宋益东
(1.煤科集团沈阳研究院有限公司,辽宁 抚顺113122;2.煤矿安全技术国家重点实验室,辽宁 抚顺113006)
控制器局域网络(Controller Area Network,CAN)作为一种高可靠的现场总线,工业控制方面已经得到广泛应用。凭借其传输距离长、通信速率高、误码率低、通信方式灵活、稳定性高、实时性好、抗干扰能力强、组网简单等优点,在工业通信领域得到了广泛应用,CAN 总线标准仅对物理层及数据链路层做了相应规定,没有对应用层进行严格的规范,根据自身的应用特点很多工业控制领域已经形成了几种标准的 CAN 总线应用层通信协议,如CANaerospace、CAL、Devi-ceNet、CANopen 等[1-3]。
目前国内煤矿安全监控系统应用最广泛的CAN 总线通信协议,主要为主从式通信方式。主从式通信的优点是各个从节点可以统一管理和调度,可保证通信信息按照设定时序进行交互,有效避免总线数据竞争或冲突。但通信效率不高,监控分站主节点在等待从节点应答期间,总线始终为空闲状态,导致总线利用率较低。根据行业标准,监控系统信息融合和多系统应急联动的要求,通信数据量大幅提升,监控系统设备间的数据交叉控制和设备间数据交互数据量在不断提升[4]。要满足不断增长的监控分站通信数据需求,在总线通信速率不变的情况下,提高总线使用效率就是唯一途径。主从式通信模式,不仅增加主节点监控分站调度管理压力,同时在等待应答期间也增加对总线的无效占用。
为提升各节点的通信效率和增加对总线利用效率,设计了一种基于CAN 总线多主通信技术的监控分站, 监控分站使用基于CAN2.0 标准规范的CAN总线应用层协议,结合煤矿安全监控系统自身应用特点设计开发的相对简化的应用层协议,它可支持监控分站多主通信[2]。监控分站采用多主通信方式,每一台监控分站都可以自主发起数据传输,从而提高总线利用率,满足行业标准要求[5-6]。
1 多主通信监控分站总体结构
监控分站总体设计框图如图1。
监控分站主要是采集现场各类传感器数据,经过分析处理,根据预设数据算法和控制逻辑,一方面通过井下工业环网将实时数据上传到监控主机。另一方面根据地面中心站命令,同时结合本分站实际情况发出控制指令,控制设备声光报警或闭锁相应电源,保证煤矿作业现场安全生产。监控分站采用模块化设计,采用基于ARM 结构的处理器,主处理器选用位32 位ARM 处理器STM32F407ZGT6[7],该处理器具有丰富的片上资源,2 路CAN 控制器,以太网DMA 总线,6 个USART 等,协处理器采用STM32F103RC,多个处理器协同工作,同时处理数据采集、展示、数据通信、控制、数据存储等任务,完全满足监控分站的响应时间。
监控分站主要由核心CPU 数据数据算法和控制处理模块、通讯模块、红外遥控模块、数据采集分析模块、液晶显示模块、中心站数据通信模块和电源模块组成[8-9]。
2 关键技术
2.1 电源电路
电源电路原理图如图2。
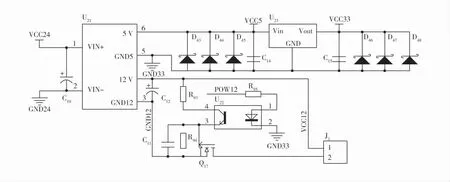
图2 电源电路原理图Fig.2 Power circuit schematic
电源是监控分站正常工作的基础,监控分站输入电源电压为DC24 V,为了提升电源的转换效率和提高监控分站的抗干扰能力,选用了一款DC/DC 模块,模块的输入电压为DC24 V,输出电压为3.3、5、12 VDC。DC12 V 给网络光电转换模块供电,DC5 V给通信模块供电,DC3.3 V 给核心ARM 芯片STM32F407ZGT6 和STM32F103RC 及外围电路供电,选用的STM32 系列ARM 芯片,正常工作电压为1.8~3.6 VDC。选用DC5 V 供电的通信芯片是为了提高通信距离和通信稳定性,DC3.3 V 直流电源采用LM1117-3.3 芯片进行电压转换,该芯片在特定的输入电压和输出负载的条件下,负载稳定度0.4%,输出电压稳定度0.2%。
2.2 CAN 总线通信电路
CAN 总线通信电路原理图如图3。

图3 CAN 总线通信电路原理图Fig.3 Principle of CAN bus communication
物理层CAN 通信主要是由光电隔离器件、CAN收发器和CAN 控制器组成,最后连接到CAN 总线上,STM32F407ZGT6 微控制器集成了CAN 总线控制器,驱动能力不强,为了增强内部的CAN 控制器的数据接收和发送能力,增加传输距离,适应煤矿监控系统应用场景,CAN 总线需要增加收发器驱动芯片,外接CAN 收发器,使之适应长距离通信的要求。监控分站CAN 的物理层使用DC5V 电压的CAN总线收发器PCA82C251 来实现,提高了总线的接收和发送能力。
为了完成监控分站与监控分站、监控分站与上位机之间的数据通信。CAN 总线通信模块需要通过程序对CAN 控制器的寄存器进行配置,可以将接收的数据或命令发送给指定的CAN 网络节点,监控分站采用多主通信会对总线通信产生竞争,利用CAN 总线的CSMA/CD 特点可以有效解决,为了解决丢包对整个监控系统造成的影响,分站采取丢包数据从发方式,从数据源头解决对于CAN 总线传输出现丢包的情况。
2.3 多主通信监控分站通信协议
目前监控系统分站CAN 总线通信协议以CAN2.0A 为主,为此主要对CAN2.0A 帧结构进行细化,从新进行定义仲裁段中标识符、数据段中数据场的具体内容。标准的CAN2.0A 链路层数据帧结构见表1,依次为帧起始、仲裁段、控制端、数据段、CRC 校验段、ACK 应答段和帧结束。
设计的监控分站多主通信协议11 位标识符区域从新划分,划分后的协议中包括3 个部分,前5 位为目的分站地址,中间部分为5 位源分站地址,最后1 位为帧类型,11 位标识符功能划分见表2。
在监控分站协议中,目的地址5 位填充接收数据的分站地址或上位机地址;源地址5 位填充发送数据的本分站地址;帧类型1 位,单帧数据用0 表示,多帧数据用1 表示。单帧数据主要应用于命令类交互;多帧数据每帧数据的第1 个字节为帧序,第2 个字节以后为各类传感器数据或控制数据,多帧数据监控分站通信协议见表3。
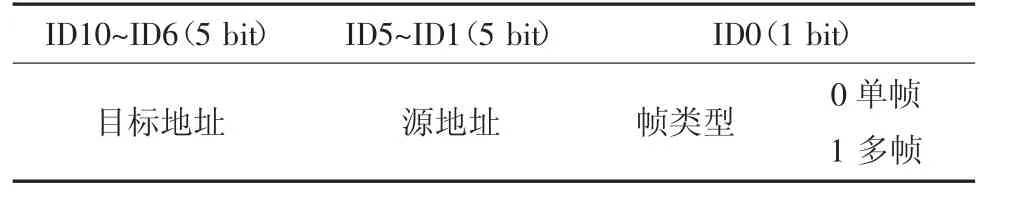
表2 11 位标识符功能划分Table 2 Function division of 11 bit identifier
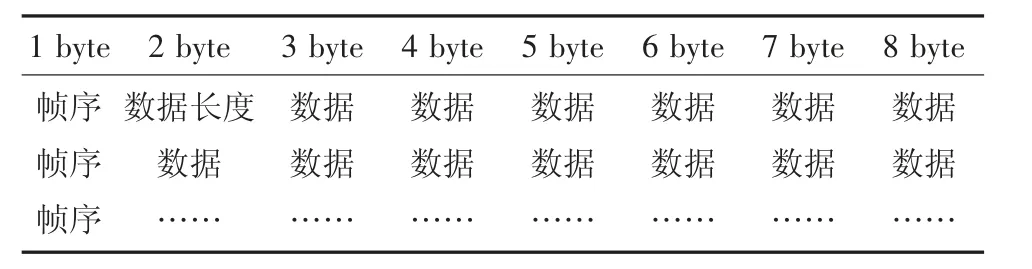
表3 多帧数据监控分站通信协议Table 3 Communication protocol of multi-frame data monitoring substation
在该监控分站协议标识符中同时设计了监控分站的数据发送地址和数据接收地址,总线上的任何一帧监控分站数据都可以被完全识别是来自哪个监控分站和发送到哪个监控分站,不会出现数据被错误接收或错误处理。经测试该协议可以满足多台监控分站间主动发起的数据传输需求。
2.4 监控分站程序
监控分站程序流程图如图4。
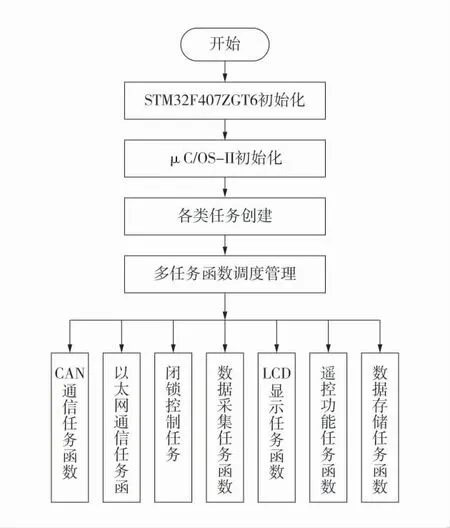
图4 监控分站程序流程图Fig.4 Flow chart of monitoring substation procedure
监控分站采用μC/OS-Ⅱ操作系统[10],该系统源代码公开,结构简单、内核小、可移植性和可裁剪性简便等特点,选用Keil uVision5 为开发环境对监控分站程序进行编译和调试。 μC/OS - Ⅱ在STM32F407ZGT6 上移植后,多任务调度和管理由操作系统内核自动处理。操作系统按照监控分站功能要求,合理划分和设计相关任务,通过任务调度函数来调度各个任务,实现分站整体高效实时运行。监控分站程序主要包括各类传感器数据采集部分,风电、瓦斯电闭锁部分,LCD 数据实时显示部分,与上位机或其他分站数据通信部分。各类任务设定不同的优先级,监控分站上电初始化通过后,由μC/OS-Ⅱ内核按照设定的优先级统一调度和管理,实现监控分站程序协调运行。
3 结 语
设计了一种基于CAN 总线多主通信技术的监控分站。介绍了多主通信监控分站总体设计和关键技术, 该多主通信监控分站可以有效支持总线多主通信,系统的通信效率和灵活性有了大幅提升。解决了长期以来监控分站主从式通信数据传输慢、总线利用率低、抗干扰能力差的问题。煤矿现场应用结果证明,监控分站运行稳定可靠,能够满足全数字化监控系统的要求。
