抓斗挖泥船定深平挖控制器研究与设计
2016-09-05周振燕仇文峰
周振燕,杜 谦,仇文峰
(中交疏浚技术装备国家工程研究中心有限公司,上海 201208)
抓斗挖泥船定深平挖控制器研究与设计
周振燕,杜谦,仇文峰
(中交疏浚技术装备国家工程研究中心有限公司,上海201208)
在分析抓斗机自动控制需求的基础上,重点分析了疏浚控制中抓斗在定深和平挖两种工况下抓斗插入深度、抓斗提升和开闭速度等参数,提出两个自动控制器的总体方案,最终对其进行了仿真计算。
抓斗;自动控制;定深;平挖
0 引言
二十一世纪是海洋资源开发的新世纪,世界各国把开发海洋、发展海洋经济和海洋产业作为国家发展的战略目标。
本文研究大型抓斗挖泥船定深挖泥和平挖挖泥自动控制技术,设计自动控制器。此项成果将填补我国在此项领域的空白,对打破国外垄断,提高自身竞争力具有深远意义。
1 控制器总体方案设计
1.1定深控制器总体方案设计
为避免超深超挖,需要自动控制抓斗在指定的深度开始挖掘。抓斗在定深工况模式下工作时,设计人员必须预先设置好抓斗的挖泥深度。当抓斗下降到预先设定的深度后,就根据控制器指令自动减速下降,直到抓斗完全按照预先设定的速度进入泥土直至停止。抓斗斗口完全闭合,即抓斗定深工作完成,抓斗根据控制器指令自动进入提升动作,到达加速提升点后,通过提升手柄抓斗加速提升,直至达到卸泥高度进行卸泥。抓斗定深挖泥流程如图1所示。
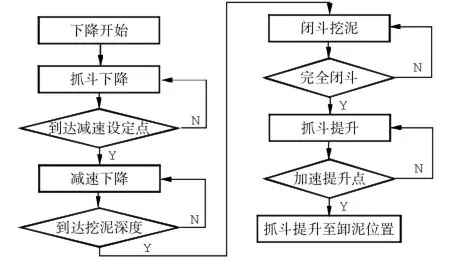
图1 定深挖泥控制流程图Fig.1 Flow chart for fixed-depth dredging
在抓斗进行定深挖泥的过程中,为了保护抓斗控制器不过载,系统对以下参数需要预先设定:抓斗下放挖泥的深度、上限停止点、下限停止点、减速位置等。在设定参数时,要根据抓斗电机的实际功率及受到的各种阻力来确定。
1.2平挖控制器总体方案设计
为使挖掘后海床面尽可能平坦,需要通过抓斗的提升与开闭联动控制,使斗的齿尖运动轨迹在斗闭合期间垂直深度保持不变。平挖控制模式下,需要事先设置抓斗的挖泥深度以及在抓斗闭斗过程中钢丝绳的补偿位移。抓斗下降到达预先设定的深度后进行闭斗工作,抓斗钢丝绳和油缸行程的数据实时送往控制器与事先存储的理论数值进行比较,计算得出钢丝绳对应的放缆量,及时给圆盘制动器发出工作指令,使抓斗钢丝绳的运动随着抓斗开闭动作实时调节,使抓斗挖掘后泥面接近平整状态。抓斗平挖挖泥流程如图2所示。
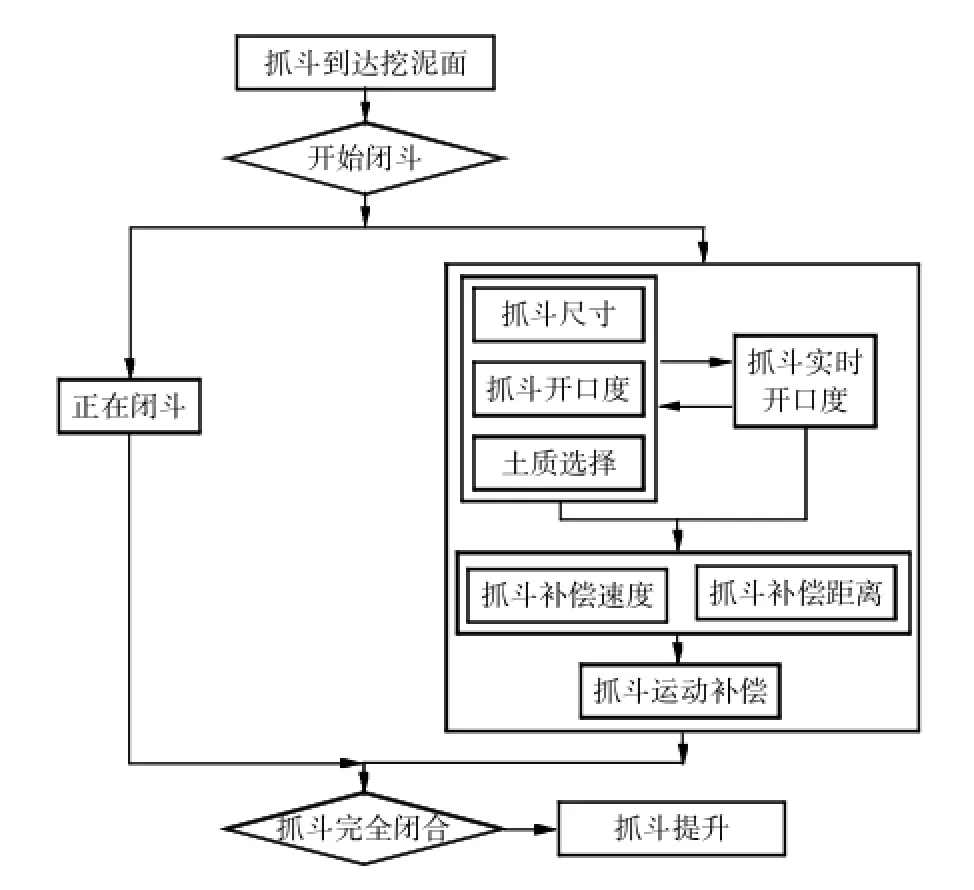
图2 平挖挖泥控制流程图Fig.2 Flow chart for flat dredging
自动控制PLC用于抓斗机定深及平挖控制器系统,各种开关量、模拟量信号配置在控制系统中实现自动控制器的正常运行。通过采用变频调速矢量控制技术,控制抓斗起升电机以及液压系统运动,实现抓斗上升下降与开闭的功能[1-5]。
2 疏浚土壤特性及控制器的参数分析
在挖泥过程中,抓斗受力主要有抓斗自重、抓斗与疏浚土间的摩阻力及钢丝绳对抓斗的拉力等。
2.1初始插入深度计算

抓斗切入泥土深度计算公式:式中:G为抓斗质量,kg;Vg为抓斗下落速度,m/s;g为重力加速度,m/s2;l'为斗刃的计算周长,cm;δ0为刃口的厚度,cm;q0为单位挖掘阻力,kg/cm2。
2.2定深控制器设计
通过对抓斗定深挖泥过程的详细分析,明确了在设计定深控制器时一系列参数设定的原理。抓斗在下降过程中要设定减速位置,减速位置的设置是在减加速度一定的情况下,按照设定的“挖泥深度”为基准反向设定。

式中:S为减速点;a为起升加速度;t为起升时间。
为了求在定深工况下刃口轨迹曲线,本文以200 m3抓斗为例,参考抓斗尺寸(图3),x为油缸行程,两个旋转轴之间的距离b=7 600 mm,R= 1 200 mm,闭斗角度α=53.2°,L=6 344.6 mm,当x=8 800 mm时,抓斗完全闭合,当x=5 800 mm时,抓斗完全打开。
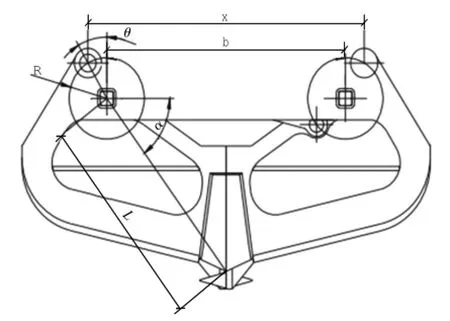
图3 抓斗结构图Fig.3 Structural diagram of a grab
抓斗到达挖泥面后,钢丝绳保持不动状态,为了得到抓斗在挖掘时刃口的挖掘曲线y,在电机不过载情况下,选取合适的油缸匀速运动速度v,s表示油缸在抓斗闭合过程中的位移,建立定深运动方程:

在抓斗闭合过程中,将抓斗实时开闭角度输入控制器中,通过角度与时间差计算得到抓斗的开闭速度vk,其中θ如图3所示。

在抓斗挖泥过程中,不同的开闭速度对应着不同的挖掘曲线,而开闭速度受到抓斗油缸速度、挖掘阻力等因素的影响。在抓斗闭合过程中,考虑到电机等因素的影响,要选取合适的挖掘速度。
在抓斗提升时,抓斗的起升重量为抓斗的自重与土重之和,起升加速度a的选择要确保起升电机在额定功率之内。
2.3平挖控制器设计
平挖与定深工况类似,都是根据电机的固有功率选择合适的起升及开闭速度,差别在于,平挖工况时,抓斗在闭斗过程中,钢丝绳要时刻根据油缸的运动上下调节,以确保挖掘平面的精度。
在平挖工况下,抓斗闭合过程中,钢丝绳时刻进行位移补偿,考虑到电机不得过载,选取合适的油缸匀速运动速度v,s表示油缸在抓斗闭合过程中的位移,其中参数θ如图3,为了得到抓斗在挖掘时钢丝绳的位移补偿曲线y,建立平挖运动方程式(5)。抓斗的开闭速度vk计算同式(4)。

在抓斗平挖闭合过程中,为了实时得到抓斗运动状态,通过计算抓斗实时开口度yl来显示抓斗的实时位置。抓斗开口度函数为:

式中:l为刃口到轴的距离。
在抓斗平挖挖泥时,不同的开闭速度对应不同的位移补偿曲线,而开闭速度受到抓斗油缸速度、挖掘阻力等因素影响。在抓斗闭合过程中,考虑到电机等因素影响,要选取合适的挖掘速度。在实际工作中,通过开口度的计算,使操作更加明了。在抓斗开口度为0时,考虑到起升电机因素,设定合适的起升加速度α提升抓斗。
3 定深平挖模型仿真
3.1定深运动仿真曲线
在开闭电机功率允许的范围内设置油缸运动速度,取油缸速度为9 m/min,可以得出抓斗在定深挖泥时的运动轨迹及速度时间曲线,如图4、图5所示。可以看到,抓斗在闭斗工作时刃口最大深度为2 500 mm,最后闭合时的深度为1 400 mm;在闭合过程中,速度始终都在变化,抓斗工作后在海床上形成了高达2 500 mm的不平整度。
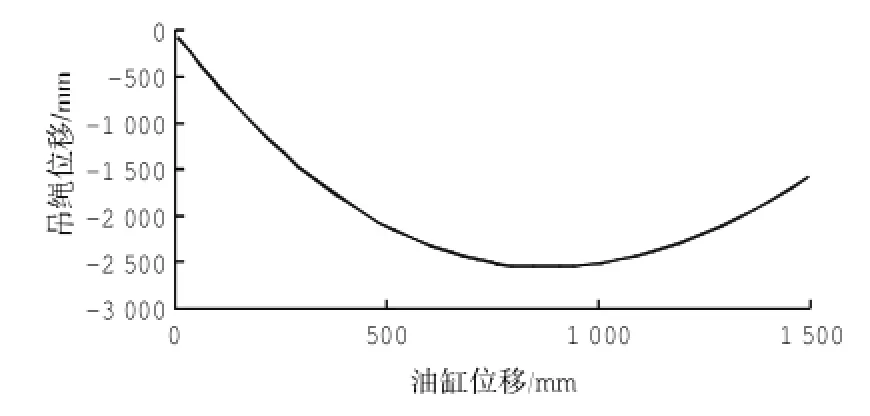
图4 定深挖挖掘轨迹曲线Fig.4 Track curve of fixed-depth dredging

图5 定深挖挖掘速度曲线Fig.5 Speed curve of fixed-depth dredging
3.2平挖运动仿真曲线
在开闭电机功率允许的范围内设置油缸运动速度,取油缸速度为9 m/min,可以得出抓斗在平挖挖泥时的位移补偿曲线以及加速度时间曲线,如图6、图7所示。

图6 平挖位移补偿曲线Fig.6 Deviation compensation curve of flat dredging
抓斗在闭斗工作时钢丝绳提升最大高度为2 500 mm,最后抓斗闭合时的提升高度为1 400 mm,与图4正好相反。同样在闭合过程中,速度始终都在变化,通过速度与加速度曲线的分析,可看出选择的油缸速度是否超出开闭电机的功率范围,从而起到保护电机的作用。开口度曲线显示了抓斗的开口度与时间的关系,可直观看出抓斗位置信息。

图7 抓斗开口度Fig.7 Opening of clamshell
4 结语
在分析抓斗机自动控制需求的基础上,重点分析了疏浚控制中抓斗在定深和平挖两种工况下抓斗插入深度、抓斗提升和开闭速度等参数,提出了定深挖泥和平挖挖泥两个自动控制器的总体方案,设计自动控制器,最终对其进行了仿真计算研究成果具有实用价值。
[1]肖汉斌,张永涛,路世青,等.疏浚抓斗平挖运动研究与仿真[J].武汉理工大学学报:交通科学与工程版,2013,37(3):482-485,490.
XIAO Han-bin,ZHANG Yong-tao,LU Shi-qing,et al.Research and simulation on flat dredging kinematics of dredging clamshell [J].Journal of Wuhan University of Technology:Transportation Science&Engineering,2013,37(3):482-485,490.
[2]朱也夫.抓斗卸船机抓斗轨迹优化及控制策略的研究[D].大连:大连海事大学,2010.
ZHU Ye-fu.Optimization and control strategy of grab running path for grab ship unloader[D].Dalian:Dalian Maritime University, 2010.
[3]缪袁泉,田雨,张红升,等.抓斗挖泥船抓斗机自动控制技术[J].中国港湾建设,2014(12):47-50.
MIAO Yuan-quan,TIAN Yu,ZHANG Hong-sheng,et al.Automatic control technologies for grab machine of grab dredger[J]. China Harbour Engineering,2014(12):47-50.
[4] 滕雪刚.港口起重机抓斗测试系统及控制策略研究[D].武汉:武汉理工大学,2012.
TENG Xue-gang.Test system and control strategy of the grab of port crane[D].Wuhan:Wuhan University of Technology,2012.
[5] 黄晨君.桥式抓斗卸船机电气控制系统的研究[D].武汉:武汉理工大学,2007.
HUANG Chen-jun.Researching the electrical control system of the bridge-type grab ship unloader[D].Wuhan:Wuhan University of Technology,2007.
Research and design of controller for fixed depth dredging and flat dredging for a grab dredger
ZHOU Zhen-yan,DU Qian,QIU Wen-feng
(CCCC National Engineer Research Center of Dredging Technology and Equipment Co.,Ltd.,Shanghai 201208,China)
On the basis of analysis of automatic control requirements of a grab,the paper focuses on the parameters for the digging depth,hoisting speed and open and close speed of the dredging grab in the fixed depth dredging and flat dredging in dredging control process.An overall scheme for two automatic controllers was proposed,which was eventually simulated.
grab;automatic controller;fixed depth dredging;flat dredging
U615.351
A
2095-7874(2016)05-0073-04
10.7640/zggwjs201605018
2015-12-21
工信部高技术船舶科研项目计划资助(工信部联装)([2012]539)
周振燕(1988— ),女,上海市人,工程师,电气工程及其自动化专业。E-mail:zhouzhenyan@CCCC-drc.com