WiFi指纹辅助的惯性传感器室内定位技术研究
2016-09-03黎海涛
王 奇,黎海涛,齐 双
(北京工业大学 电子信息与控制工程学院,北京 100124)
工程与应用
WiFi指纹辅助的惯性传感器室内定位技术研究
王奇,黎海涛,齐双
(北京工业大学 电子信息与控制工程学院,北京100124)
为了提高基于移动终端的室内定位精度,结合WiFi指纹定位和传感器惯性导航技术的优点,本文提出了一种WiFi指纹辅助的惯性传感器室内定位技术。首先,利用移动终端自带的陀螺仪、加速度传感器和磁力计,通过所提动态阈值调整算法判断行人行走状态,并通过方向检测算法计算行人运动方向。然后,采用改进的地图匹配粒子滤波算法实时计算行人位置,并结合WiFi指纹定位信息和惯性传感器导航信息提出联合定位算法周期地校正行人位置。实验结果表明,所提WiFi指纹辅助的惯性传感器室内定位技术能够有效提高定位精度。
室内定位;WiFi指纹;惯性传感器;粒子滤波
TP92
A
1673-5692(2016)02-157-07
0 引 言
目前,室内环境定位与导航的需求日益增大,如地下停车场、仓库、图书馆、大型商场、机场大厅等环境中,通常需要确定人员、设备的位置信息。但是受复杂室内环境、定位精度等条件的限制,基于卫星的全球定位系统(GPS)在室内、楼宇间等地方无法发挥其优势,因此需要采用其他技术来完成室内定位导航功能。
室内定位技术主要包括WiFi、射频识别(RFID)、超声波、Zigbee、蓝牙、红外线、基于运动传感器的惯性导航等技术。WiFi热点的遍布性,使得WiFi定位技术的应用节约了大量成本。考虑到成本及实施复杂度问题,WiFi定位导航技术具有较大优势。
特别地,基于RSSI的WiFi指纹定位方法由于相对简单、成本低,而被广泛应用。但是由于室内环境复杂,WiFi信号容易受到干扰,信号强度容易产生跳变,且存在信号盲区,这导致定位偏差大。因此,只利用WiFi技术进行定位导航无法满足人们的需求。
智能移动终端普遍配有陀螺仪、加速度传感器、电子罗盘等运动传感器,这使得基于移动终端传感器的惯性导航技术具有较好的推广性。利用移动终端自带传感器进行导航具有不易受环境影响、稳定性高等优势。但是,由于电子罗盘易受环境干扰,会导致航向角度出现偏差,且步态判断误差和步长估计误差会导致行走距离误差,这些因素造成的累积误差会导致惯性导航系统无法长时间精准工作。有效消除累计误差成为解决问题的关键。
把WiFi定位与基于传感器的惯性导航技术相结合,既能消除惯性导航长时间累积误差问题又能避免WiFi定位鲁棒性低的问题。目前,人们对此技术进行深入研究,譬如,文献[3]利用WiFi指纹辅助的传感器惯性导航进行定位,但其直接用WiFi指纹定位结果校正行人位置,在WiFi信号较差的区域会造成较大偏差。文献[4]也研究了WiFi指纹辅助的传感器惯性导航,但其惯性导航时仅用简单航迹推算而未考虑地图信息,故精度较差。文献[5]研究了WiFi ToF定位与传感器惯性导航结合的技术,但是由于室内环境复杂,且存在电磁干扰及多径效应等因素,导致WiFi ToF测量时间误差较大,因此精度较低。
为了有效提高室内定位精度,本文提出WiFi指纹辅助的惯性传感器室内定位技术,结合地图信息通过地图匹配的粒子滤波算法进行定位,并采用指纹与惯性导航融合的联合定位算法进行位置校正,具有较高精度与鲁棒性。
1 定位系统实现
提出的WiFi指纹辅助的惯性传感器室内定位系统如图1,主要包括传感器惯性导航和WiFi指纹定位两部分。其中,基于传感器的惯性导航原理为:首先,利用加速度计获取加速度信息,以此通过步态检测算法判断行人行走状态;然后,利用陀螺仪、磁力计分别获得终端的地磁方向和旋转速率,并据此采用航向计算算法得到行人的运动方向。最后,结合地图信息,通过地图匹配的粒子滤波算法得到行人的估算位置。基于RSSI的WiFi指纹室内定位的原理为:首先,移动终端扫描当前的WiFi信号强度,然后与指纹库中信息进行匹配,通过KNN算法得到行人估算位置。
当需要对行人位置校正时,把惯性导航估算的位置与WiFi指纹定位的估算位置通过联合定位算法相融合得到行人的最终位置。下面分别介绍各个功能单元的工作原理及步骤。

图1 室内定位系统
1.1步态检测
人在行走过程中竖直方向加速度值呈正弦曲线趋势周期性变化,如图2。现有行人步态检测大多采用分析竖直方向加速度信号进行判定的方法。通过分析大量实验数据发现,人在行走过程中,水平方向加速度信号平均值在一定范围内波动。加入Y轴加速度判断条件可以有效滤除高频抖动,提高步态判断正确率。因此,本文采用Z轴和Y轴加速度共同判定行人步态。
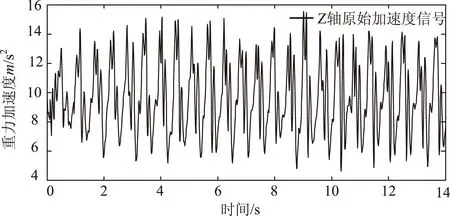
图2 Z轴原始加速度信号
1.1.1加速度信号处理
由图2可知,直接从传感器获取的加速度信号含有噪声。为了获得理想分析效果,需要对信号去噪。本文采用移动平均滤波器对Y轴和Z轴加速度信号进行去噪处理。下面以Z轴加速度信号为例说明原理:把Z轴加速度信号根据时间序列逐项输入,依次计算一定时间内信号样本的平均数,其具体步骤为:
(1)为了滤除加速度信号中的噪声,把加速度信号v(k)通过时间窗口为T1秒的短时移动平均滤波器,其输出信号为
(1)
其中,T1秒内的加速度值采样数N=T1/Δt,这里T1取典型值为0.2s,Δt为加速度计采样时间间隔, F(k)的波形如图3中细线所示。
(2)把短时移动平均滤波器输出信号F(k)通过窗口大小为T2秒的长时移动平均滤波器,得到加速度信号的实时平均值为
(2)
其中,T2秒内加速度值采样数M=T2/Δt,这里T2取典型值为1s,S(k)的波形如图3中粗线所示。
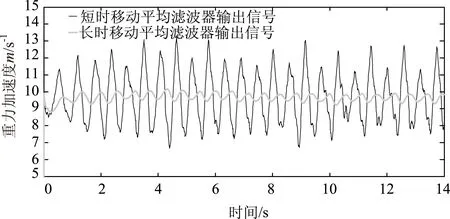
图3 移动平均滤波后Z轴加速度信号
类似地,采用上述方法处理移动终端Y轴加速度信号,得到其实时平均值Sy范围在0.3~3之间。
1.1.2步态检测
观察图3加速度曲线,可以看到短时移动平均滤波器输出信号曲线F(k)(图中细线)与长时移动平均滤波器输出信号曲线S(k)(图中粗线)周期性交叉。故本文把满足判别条件:若k时刻F(k)=S(k),且k-Δt时刻F(k-Δt)>S(k-Δt)的交叉点称为候选步态(即可能的脚步落地时刻)。
由于人体轻微抖动时的加速度信号特征也可能满足上述候选步态判别条件。为了区分正常行走与轻微抖动,本文采用功率阈值滤波器,通过比较相邻候选步态间累积功率值P与当前功率阈值Tth的大小,以此判断行人是否走步。假设两相邻候选步态时刻分别为k和t,累计功率值P定义如下
(3)
其中,k时刻与t时刻间加速度值采样数R=(t-k)/Δt,i∈{1,2,…,R}。
本文采用如下条件判断行人正确步态(即行人脚步落地时刻):1)行人步态为候选步态;2)累计功率P大于功率阈值Tth;3)Y轴加速度实时平均值Sy在0.3~3之间。若某一时刻的加速度值满足上述三个条件,则判定该时刻步态为正确步态。
1.1.3动态阈值调整
由于行人行走特征的差异,以及行走速度的影响,采用固定功率阈值来判断步态会造成较大误判率。因此,本文提出动态阈值调整算法来自动设定功率阈值Tth。通过分析大量实验数据,得到行人行走时合理功率阈值在400~1 500之间,文中把功率阈值Tth初始值设为1 000。算法流程如下。
(1)设定扫描周期为T的计时器,根据实验测试结果文中把T根据经验值设为40s;
(2)统计扫描周期T内总步数M和错误步数N。计算步态误判率e=N/M;
(3)判断e的大小,若e≤0.1,表示步态检测正确率较高,无需调整功率阈值;若e>0.1,统计本次扫描周期T内所有累积功率值小于1 500的候选步态数量,并计算其均值A
(4)
其中,S为小于1 500的累计功率个数,Pi为第i个累计功率。
(4)判断A的大小,若A大于400,则调整功率阈值Tth,使得Tth=A。
为了验证动态阈值调整算法的有效性,选取A、B、C 3名实验人员分别以最慢速度和正常速度行走100步,然后记录并计算步态检测准确率,实验数据如表1。
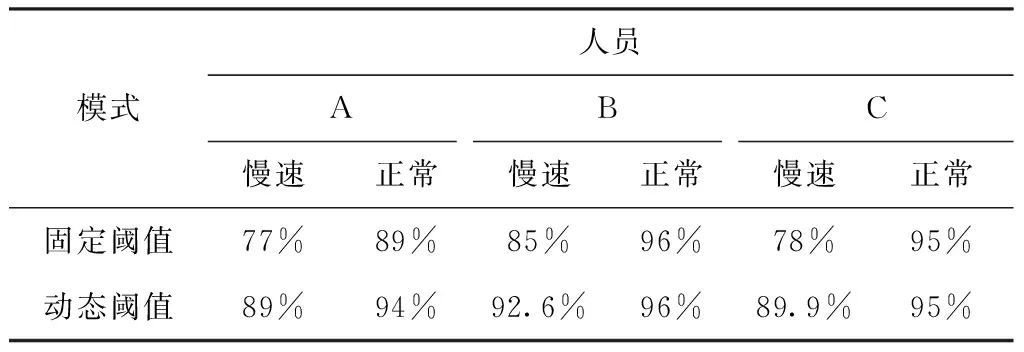
表1 步态检测正确率
可以看到,在固定阈值条件下,行人以正常速度行走时步态检测正确率较高。当慢速行走时正确率较低。当采用动态阈值调整算法后,慢速行走时的步态检测正确率相对于固定阈值有较大提升。由此,说明所提动态阈值调整算法可以有效提高步态检测正确率。
1.2航向检测
目前,行人导航系统中一般采用磁力计或陀螺仪获取行人航偏角。但由于电子设备干扰,行走中抖动都会导致航偏角出现偏差;陀螺仪易产生漂移,也会导致航偏角不准。因此,为了得到更精准方向,把磁力计和陀螺仪相结合,通过互补滤波器处理两者输入信号,得到行人航偏角。
互补滤波器工作原理如图4。首先,通过低通滤波器滤除磁力计信号噪声,然后对磁力计信号和陀螺仪信号进行加权得到行人航偏角θ
(5)
其中,θr是终端相对地球北极方向夹角;θab为陀螺仪绝对角度;补偿参数a=Δt/(Δt+Tf);Tf为低通滤波器滤波时间;Δt为终端信号采样时间间隔。

图4 互补滤波器原理
1.3地图匹配粒子滤波算法
为了提高传感器惯性导航精度,考虑到行人行走轨迹不可能穿过墙壁的客观事实,本文采用改进的基于地图信息的粒子滤波算法,结合地图信息剔除穿过墙壁的无效粒子来优化行人轨迹。
粒子滤波算法的原理为:用一定数量的离散随机采样点即粒子,对系统随机变量概率密度函数进行估计,以样本均值代替积分运算,从而得到状态的最小方差估计。粒子状态以向量形式表示为 V=[x,y,h,l],其中x和y分别表示粒子横纵坐标,h表示粒子方向,l表示行人步长。通过行人步态事件和行走方向θ,对粒子状态进行更新。
实验发现,惯导过程中存在一些粒子由于逐渐偏离粒子群而影响精度,故提出通过滤除偏离粒子群平均坐标点距离较大的粒子来提高精度。所提改进的地图匹配粒子滤波算法流程如图5,其具体步骤如下。
步骤1:初始化粒子,生成离散粒子集。
步骤2:当检测到步态事件,对每个粒子进行状态更新,状态更新方程式如下
(6)
其中,xk和yk分别为粒子k时刻状态横纵坐标,lk为步长,hk为粒子方向,θ为终端当前方向。
步骤3:判断粒子状态更新后是否穿过墙壁,并滤除穿过墙壁的粒子。
步骤4:计算粒子平均坐标(xavg,yavg)
(7)
其中,(xi, yi)表示第i个粒子的坐标,m为当前存活粒子总数。
步骤5:根据如式(8)计算各个粒子与平均坐标(xavg, yavg)的偏离距离di,并将偏离距离大于一定值Th的粒子剔除,本文Th取经验值6m。
(8)
步骤6:若被滤除粒子数大于总粒子数的m%,则补充粒子,生成与被滤除粒子数相同的粒子, 本文m取经验值30。
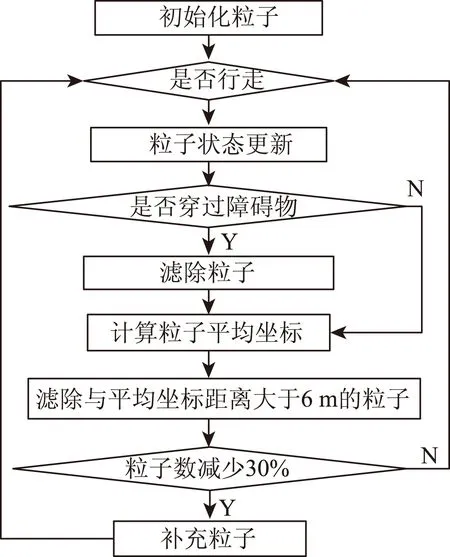
图5 地图匹配粒子滤波流程图
为了验证改进的地图匹配粒子滤波算法的有效性,实验人员沿试验场地行走40 m,并记录数据,得到误差累计分布函数(CDF)曲线如图6所示。

图6 误差累计分布函数
可以看出,在整体误差分布上,提出的改进算法误差比传统算法的误差低。
1.4WiFi指纹定位
WiFi指纹定位分为两个阶段:离线阶段和在线阶段。离线阶段,首先确定采样点,对每个采样点进行多次RSS采样,建立定位区域的指纹库。在线阶段,根据终端当前位置获取到的RSSI,选取合适的匹配算法与指纹库信息进行匹配,确定终端位置。
由于室内环境复杂,WiFi信号传播的时变特性,传统RSS指纹定位中,终端测量到的RSSI值与指纹库指纹存在较大差异。由于指纹量大,且存在较多无效指纹,导致定位结果较差。因此,本文在WiFi指纹利用仿射传播聚类法对指纹进行处理。
1.4.1离线阶段
将定位区域内采样点记为RPi,i∈{1,2,...N},遍历所有采样点进行RSSI采样,把各采样点的指纹存储为FPi=(MACm,RSSIi)T,m∈{1,2,…n},对所有采样点进行多次采样,形成指纹图,如表2。其中,MACi表示终端搜索到的第i个AP的MAC地址。

表2 指纹图
进一步,利用仿射传播聚类算法对所采集的指纹进行训练,得到类首与类成员信息,类首表示为{c1,c2…,cg},g表示类首个数。并与指纹图一起存储到服务器。
指纹聚类的原理如图7,每个椭圆中的点属于同一类,实心圆代表此类的类首。通过指纹聚类处理,可将定位搜索区域缩小至一个或少数类中,减小了部分RSSI时变特性造成的不良影响,能够有效提高定位精度,且降低指纹匹配计算的复杂度。

图7 聚类原理说明图
1.4.2在线阶段
本文采用K-NN匹配算法。其基本原理为通过计算终端当前获取的指纹与指纹图中所有指纹的欧氏距离,选出与当前指纹欧式距离最小的k个采样点,计算其坐标平均值确定终端位置确定终端位置。欧式距离越小表示当前测量指纹与指纹库指纹匹配度越高,因此定位可信赖度越高。实施步骤如下。
(1)扫描无线AP,得到当前位置指纹FPm,计算其与各个类首间的欧式距离dm,如式(9)。选取欧氏距离最小的q个(可以是1个或多个)类首。
(9)
其中,φm为当前指纹FPm的RSSI向量,φi为指纹图中采样点RPi的RSSI向量。
(2) 把选出的类首及其对应的类成员,作为定位指纹。对欧氏距离dm进行升序排序,选出前k个指纹,计算其位置平均值得到WiFi定位位置Pw,如式(10)所示。
(10)
其中,Pi为第i个指纹对应位置。
1.5联合定位算法
随着传感器惯性导航时间的增加,其累计误差不断增大,若累计误差过大则惯性导航估算的位置不能准确表示行人位置。为解决该问题,本文把WiFi指纹定位技术与惯性导航技术相融合,提出联合定位算法。算法原理为,设定位置校正周期Tr,当传感器惯性导航时间达到校正周期Tr时,启动WiFi指纹定位来辅助校正行人位置。
本文实验中根据经验值把位置校正周期Tr设为40 s,即每隔40 s,启动WiFi定位模块扫描当前位置WiFi信号强度,并与指纹库中RSSI指纹进行对比,计算当前信号与指纹库中指纹的欧式距离。选出当前最小欧氏距离d。
通过数据分析得到,当欧式距离d小于某一阈值δmin时,WiFi定位结果可信度较高。反之,欧式距离d大于某一阈值δmax时,WiFi定位结果可信度较低。根据最小欧氏距离d的大小,本文将行人位置校正分为以下三种情况。
(1)若最小欧式距离d小于或等于最小阈值δmin,文中δmin取值为120,表示WiFi指纹定位可信度较高,把其定位位置Pw设为行人当前位置。
(2)若最小欧式距离d大于或等于最大阈值δmax,文中δmax取值为150,表示WiFi指纹定位可信度较低,重新扫描RSSI进行定位。
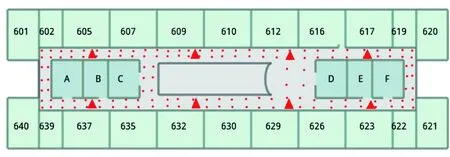
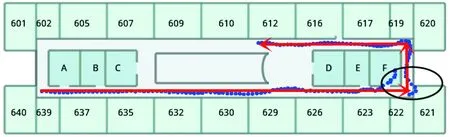
(3)若最小欧式距离d满足 σmin (11) 其中,加权权重w=a+b,a为WiFi定位位置加权系数,如式(12)所示,L为前一次位置校正与本次校正时间间隔内行人行走距离。b为惯性导航位置加权系数,如式(13)所示。 (12) (13) 选取办公楼的一层为实验场地,如图8,总面积为70 m×22 m。楼道中装有8个AP热点,如图中三角形所示。每隔1.5 m设置一个采样点,如图中圆点所示,在每个采样点采集RSSI值10次。开发了基于Android 4.4的定位软件,并在华为荣耀6终端上进行了测试。 图8 采样点及AP位置分布 为了比较现有方法与本文算法的精度及鲁棒性,以相同位置为起点,分别测试了单独惯性导航、WiFi指纹定位以及所提WiFi指纹辅助的传感器惯性导航的定位效果。惯性导航行人步长根据经验值设定为0.6 m,粒子滤波的粒子数设为1000。 (1)单独惯性导航 行人行走轨迹如图9。其中带箭头直线表示行人行走轨迹,不规则曲线表示惯性导航推算的轨迹,行走时间为1 min,行走距离75 m。圈出部分表示行人实际轨迹与惯性导航推算轨迹的位置偏差。 图9 单独惯性导航效果 可以观察到,单独使用惯性导航随着行走时间的增长累计误差逐渐增大,故单独惯性导航无法长时间精确定位。 (2)单独WiFi指纹定位 实验结果如图10,其中带箭头直线表示行人行走轨迹,不规则圆点表示WiFi指纹定位的位置。 图10 单独惯性导航效果 可以观察到,定位时位置跳动较大,故单独WiFi指纹定位精度及鲁棒性较差。 (3)WiFi辅助的惯性导航 设定WiFi校正周期为40 s,通过RSS指纹定位得到行人初始位置。实验结果如图11,其中带箭头直线表示行人行走轨迹,不规则曲线表示WiFi辅助的惯性导航推算轨迹,圈出位置为达到WiFi辅助校正周期后的校正位置。 图11 联合定位法效果 可以看到,本文所提联合定位算法,可以通过定时纠正行人位置解决惯性导航累计误差问题且无WiFi指纹定位位置跳变问题,系统可以长时间稳定定位导航。 定位算法的定位精度均方根误差(RMSE)值如表3,可知本文所提联合定位方法精度高于RSS指纹定位法以及惯性导航算法。 表3 定位算法RMSE 为了提高室内定位效果,本文提出一种WiFi指纹辅助的传感器惯性导航的定位方法。在传感器惯性导航步态检测方面,提出动态阈值调整算法自动调整功率阈值,从而提高了歩态检测准确率。改进了基于地图信息的粒子滤波算法,提高惯性导航精度。最后,提出了联合定位算法对通过对惯性导航位置进行校正消除累计误差。实验结果表明,所提方法可有效提高室内定位精度。 [1]Teresa G, Alberto G, Hani H, et al. A Fuzzy Logic-Based System for Indoor Localization Using WiFi in Ambient Intelligent Environments[J]. IEEE Transactions on Fuzzy Systems, 2013, 21(4): 702-718. [2]Nasrullah M, Yunus N. Filters for device-free indoor localization system based on RSSI measurement[C]. International Conference on Computer and Information Sciences (ICCOINS), 2014. [3]Shizhe Z, Yongping X, Jian M, et al. Indoor location based on independent sensors and WIFI[C]. International Conference on Computer Science and Network Technology (ICCSNT), 2011. [4]周亮,付永涛,李广军. 无线定位与惯性导航结合的室内定位系统设计[J]. 测控技术与仪器仪表, 2014,40(4):73-76. [5]Schatzberg U, Banin L, Amizur Y. Enhanced WiFi ToF indoor positioning system with MEMS-based INS and pedometric information[C]. Position, Location and Navigation Symposium(PLANS), 2014. [6]Wonho K, Seongho N, Youngnam H, et al. Improved heading estimation for smartphone-based indoor positioning systems[C]. Personal Indoor and Mobile Radio Communications (PIMRC), 2012. [7]Ming L, Haijun W, Qingye G, et al. Research on Particle Filter Based Geomagnetic Aided Inertial Navigation [C]. Systems and Control in Aeronautics and Astronautics (ISSCAA), 2010. [8]齐双, 王奇, 黎海涛.传感器辅助的WiFi指纹室内定位方法[J].中国电子科学研究院学报,2012, 40(1):103-106. [9]Mirowski P, Tin H, Saehoon Y, et al. SignalSLAM: Simultaneous localization and mapping with mixed WiFi, Bluetooth, LTE and magnetic signals[C]. Indoor Positioning and Indoor Navigation (IPIN), 2013. [10]Radu V, Kriara L, Marina K. Pazl: A mobile crowdsensing based indoor WiFi monitoring system[C]. Network and Service Management (CNSM), 2013. 王奇(1990—),男,河北省人,硕士,主要研究方向为基于移动终端的室内定位; E-mail:wenwen_ti@163.com 黎海涛(1972—),男,四川省人,博士,副教授,主要研究方向为无线通信、移动互联网、物联网等; 齐双(1989—),女,北京市人,硕士,主要研究方向为室内无线定位方向。 WiFi Fingerprint Assisted Inertial Sensor Indoor Positioning Technology Wang Qi, LI Hai-tao, QI Shuang (College of Electronic Information and Control Engineering, Beijing University of Technology, Beijing 100124, China) In order to improve the accuracy of indoor positioning based on the mobile terminal, an inertial sensor indoor positioning technology assisted by WiFi fingerprint is designed in this paper. Firstly, the gyroscope, accelerometer, magnetometer are utilized to detect pedestrians walking state and direction by step detection and direction detection algorithm, then the particle filter algorithm based on map matching is propose to estimate pedestrian location in real time. Finally, the joint positioning algorithm is proposed to correct pedestrian location periodically. Simulation results show that the proposed method can effectively improve indoor positioning accuracy. Indoor Positioning; WiFi Fingerprint; Inertial sensors; Particle filter 10.3969/j.issn.1673-5692.2016.02.007 2015-10-30 2016-01-10 航空电子系统综合技术重点实验室和航空科学基金联合资助项目(2013ZC15003),北京工业大学-青海民族大学合作基础研究基金项目
2 实验结果与分析



3 结 语

