国外载人航天在轨服务技术 发展现状和趋势分析
2016-09-02郭筱曦北京空间科技信息研究所
郭筱曦 (北京空间科技信息研究所)
国外载人航天在轨服务技术 发展现状和趋势分析
郭筱曦 (北京空间科技信息研究所)
保证在轨和在研航天器能在复杂空间环境中长时间稳定运行,已成为空间技术发展的重要目标。20世纪60年代,研究人员提出了“在轨服务”的概念,由此开创了空间在轨服务技术这一新的领域。空间在轨服务(OOS)是指在太空中通过人、机器人(或类机器人航天器)或两者协同来完成涉及延长航天器、平台、空间站附属舱和空间运载器寿命及能力的空间装配、维护、维修等空间操作。
空间在轨服务技术经历了从有人服务到无人自主服务的发展和过渡,虽然呈现出高度自主化的趋势,但曾在很长一段时期内,通过有人服务积累了大量经验,试验了相关技术,为后续发展奠定了坚实基础。与此同时,在可预见的将来,人类和机器人不可能相互取代。因此,进一步扩展人类与机器人的交互与协同,实现有人与自主相结合的在轨服务,也是未来载人航天在轨服务的重要发展方向之一。
1 国外空间在轨服务技术发展概述
有人在轨服务技术发展概述
有人参与或主导的空间在轨服务技术的研究与实践已有数十年历史。1965年3月,苏联航天员列昂诺夫完成了人类第一次舱外活动(EVA)。1973年,美国航天员在舱外活动中成功维修了“天空实验室”(Skylab)上未能正常展开的太阳电池翼,由此开创了航天员在舱外进行在轨服务作业的历史,并充分证明了有人在轨服务的应用价值。从20世纪90年代至今,空间在轨服务技术得到了更广泛的应用,以美国、俄罗斯为代表的有人在轨服务技术已趋于成熟。
1)“哈勃空间望远镜”(HST)的维修和维护。“哈勃空间望远镜”于1990年4月由发现号(Discovery)航天飞机送入太空,至今已在轨服役26年,美国航空航天局(NASA)先后安排了5次针对它的在轨服务,最终延长了其使用年限,且每次服务都使其功能得到提升,性能与可靠性得到显著提高。
2)对“国际通信卫星”(lntelsat)的在轨服务。国际通信卫星-603在1990年发射升空后星箭无法分离,导致卫星被留在近地轨道。国际通信卫星组织(现已更名为国际通信卫星公司)委托NASA发射近地点发动机替换件提升轨道。1992年,在奋进号(Endeavour)航天飞机首飞任务中,航天飞机与该卫星交会并进行在轨捕获,航天员执行舱外活动,在卫星上安装了1台新的近地点发动机,成功将卫星推入预定转移轨道,最终实现了对该卫星的重新部署。
3)空间站组装和维护。和平号空间站(Mir)从1986年2月升空到2001年3月离轨,共运行15年,其间故障频发,多达1500次。经过100多名航天员的在轨维修和维护,和平号才能实现超期服役。“国际空间站”(ISS)是接受在轨服务的最典型范例之一,对它的在轨服务除了维修、更换设备等行为以外,还包括大规模的在轨装配服务,使美国、俄罗斯等航天大国积累了丰富的在轨服务经验。

航天员站在加拿大机械臂-2上
自主在轨服务技术发展概述
近年来人工智能、机器人等新兴技术飞速发展,为自主在轨服务提供了良好的基础。美国是自主在轨服务的先行者,NASA和美国国防高级研究计划局(DARPA)都很重视自主在轨服务能力开发。欧洲国家中,德国对在轨服务的研究由来已久,技术水平很高,正在将服务范围从低轨扩展到高轨。空间机器人是加拿大开展航天活动的支柱之一,加拿大研制并建造的几代空间机械臂系统及与美国合作开展的机器人燃料加注计划,都是瞄准在轨服务的应用领域。日本的大型空间机械臂研制水平接近加拿大,通过开展一系列试验任务,初步掌握了在轨服务关键技术。
2 “国际空间站”舱外活动概况
在“国际空间站”的建造和全面应用阶段,航天员通过执行舱外活动完成了各种在轨服务任务。截至2016年5月31日,已进行193次专用于“国际空间站”组装和维护的舱外活动,总时长为1204h47min,其中28次舱外活动从到访航天飞机出发,117次任务从寻求号(Quest)气闸舱出发,46次从码头号(Pirs)对接舱出发,还有2次从星辰号(Zvezda)服务舱前端的转移舱出发。
“国际空间站”舱外活动系统
气闸舱是“国际空间站”主要的加压过渡舱,设计目的是为身着航天服的航天员做舱外活动前的准备工作。寻求号气闸舱于2001年7月由阿特兰蒂斯号(Atlantis)航天飞机发射升空,之后与“国际空间站”的节点-1舱联接。寻求号气闸舱长6m,直径3.9m,质量6.5t,由乘员气闸和设备气闸两部分组成。2001年9月,俄罗斯码头号对接舱抵站。
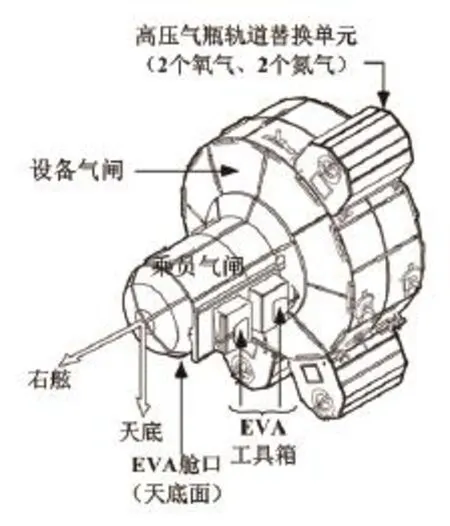
由乘员气闸和设备气闸组成的寻求号气闸舱
目前,站上所有国籍的乘员都使用美国“舱外机动装置”(EMU)和俄罗斯“海鹰”(Orlan)系列航天服进行舱外活动。
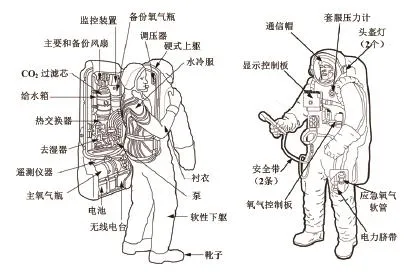
“舱外机动装置”是由几个需组装才能穿上的部分组成的模块化航天服。航天服背面的背包,即基本生命保障系统(PLSS)包含了必要的设备和消耗品。以“舱外机动装置”为基础的舱外活动标称计划为7h,此外,配备了一个提供30min备用氧气供应的副氧包。“海鹰”系列航天服为大小可调的航天服,穿上时几乎不需要组装,像一扇门一样打开,让乘员可以进出航天服。以“海鹰”为基础的舱外活动标称计划为5h,同样有30min的应急氧气供应。
与航天飞机不同,空间站不能机动救援自由漂浮的舱外活动乘员。美国航天员使用“舱外活动简易救生装置”(SAFER),它是一种独立的、有推进力的背包自救系统。这种装置结构小巧简单,安放在舱外活动航天服的背包下方,质量为38.25kg,有24个小推力发动机,可做六自由度的机动控制,工作时间为13min。
除上述系统以外,站上还有大量专用舱外活动工具和约束器,保障作业顺利完成。

美国“舱外机动装置”
俄罗斯海鹰-M航天服

“国际空间站”航天员进行舱外活动
舱外活动操作
一次舱外活动前后需进行很多操作,包括舱外活动前准备气闸舱、检查航天服和防止减压病的预吸氧协议程序,以及舱外活动后的航天服维护和气闸舱处理等。航天员在出舱前要预先在气闸舱内呼吸纯氧,用纯氧取代体内血液中的氮气,以预防减压病,这个过程称为预吸氧。如果将预吸氧时间计算在内,航天员舱外活动全过程至少需要11h,其中真正在舱外的工作时间为6h。
舱外活动发展
早期的“阿波罗”(Apollo)和“天空实验室”任务中,由于任务性质和有限的货物返回能力,大部分舱外活动硬件被丢弃在月球表面或留在“天空实验室”上。20世纪70年代,因航天飞机提供返回系统硬件进行整修、维护和故障调查的能力,任务设计者利用这种能力设计了“舱外机动装置”和相关硬件。
随着航天飞机退役,美国制定了新的操作概念方案,以保证“国际空间站”舱外活动硬件可继续使用。要解决的挑战包括延长站上舱外活动硬件的使用寿命和认证期,保证使用备选运载火箭安全发射舱外活动硬件的能力,维持“舱外机动装置”硬件的在轨可操作性,并确保高纯度水源以保障供给。
未来,人类足迹将进一步向深空、向其他行星拓展,用于执行在轨服务任务的舱外活动系统和操作概念方案也需要随之更新和演进,以适应复杂的空间环境和任务需求。
3 载人航天领域先进在轨服务体系研究现状和趋势
“国际空间站”作为先进在轨服务技术试验平台的应用
“国际空间站”是长期在轨的大型空间基础设施,使其成为验证有人和无人在轨服务系统的天然平台。已利用“国际空间站”上的机器人系统进行过多次在轨服务作业试验,验证了众多关键技术,其中最瞩目的是近年开展的“机器人燃料加注任务”(RRM)。
“机器人燃料加注任务”由NASA和加拿大航天局(CSA)共同开发,设计利用“国际空间站”上的“灵巧专用机械手”(Dextre)验证遥控机器人的在轨服务能力。为满足任务要求,NASA戈达德航天中心为“灵巧专用机械手”设计了一个模块和工具包。“机器人燃料加注任务”模块搭载航天飞机发射,于2011年7月抵达站上,安装在“国际空间站”的外部平台上,总质量约250kg,有典型卫星上常见的28种零部件:喷管、阀门和电线等。“机器人燃料加注任务”模块内也存有4种供“灵巧专用机械手”使用的新工具:钢丝钳和隔热层操纵工具、多功能工具、安全帽移除工具与喷管工具。
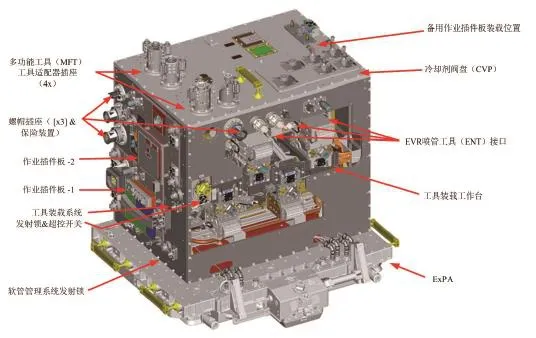
“机器人燃料加注任务”硬件结构图
“机器人燃料加注任务”标志着“灵巧专用机械手”的首次非“国际空间站”维护性作业及首次用于研究和开发项目,并例证了“国际空间站”逐步被用作技术试验平台的过程。“机器人燃料加注任务”分为两个阶段:第一阶段验证可用于服务和加注在轨卫星的新技术、新工具和新技能;第二阶段始于2015 年4月,在“机器人燃料加注任务”模块上安装新硬件,进一步验证上述机器人能力。
有人在轨服务先进体系概念研究
迄今为止,人类已完成的空间在轨服务都在近地轨道上开展。当前地球静止轨道(GEO)上的航天器都并未设计可捕获和服务功能,因此,GEO航天器无人在轨服务存在的困难包括:缺少捕获接口、有锐边危险、没有设计容纳舱外活动设备的功能、没有设计组合体运行或自由漂浮控制模式等。
2011年,NASA和DARPA开展了一项联合研究,考查可用于对GEO上航天器提供有人在轨服务的能力和体系方案,称为“有人GEO服务”(MGS)研究。该研究的主要利益相关方为DARPA战术技术处、NASA首席技术专家办公室和当时的NASA空间运行任务部。该研究主要关注能力和技术,并非用于提出或评断具体方案,也不指定具体服务对象,研究目的是为将来5~10年内的有人在轨服务任务评估和预测技术、方案和架构。
“有人GEO服务”研究的顶层架构要素包括:①居住舱/服务体,维持3名乘员在GEO生存60天,支持2人舱外活动,在2次载人任务之间的间隔期可自主运行最多6个月;②乘员运输飞行器,将人类乘员安全运送至GEO目标位置并返回地球,每次维持3名乘员生存4天,该飞行器可在GEO环境中休眠60天;③太空拖船,捕获非合作目标航天器,重定位GEO航天器或其他组成部分,至少在GEO环境中运转5年;④运载器和上面级,近地轨道运载能力14.6t。
团队主要考虑2种“有人GEO服务”方案:①GEO直接入轨和返回;②GEO往返轨道转移。方案1包括2个自动拖船,用于移动服务对象往返于原位置与GEO双用居住舱/服务体之间;方案2仅包含GEO上的居住舱/服务体,可自主机动至服务位置,无需拖船。整个研究的其中一部分是专门评估在地球、近地轨道和GEO航天器服务位置之间高效转移乘员的能力。乘员转移方案权衡包含从“双子星座”(Gemini)型太空舱到有翼升力体飞行器在内的各种方案。服务任务可分解为以下几个标称阶段:交会、检测、捕获、服务和分离。该研究不考虑全由机器人执行的无人服务备选方案,尽管为提高有人服务的效率,大量使用了机器人系统。由于GEO环境恶劣,适合途径是为最复杂的一部分作业预留人类乘员舱外活动时间,而允许机器人执行其余作业。具体来说,包括:①计划在任何可行的时候使用机器人系统,同时权衡新工具开发和乘员暴露时间;②计划当无可行或及时的机器人方案存在时,由人类乘员执行舱外活动;③可能的话,为每次机器人作业保留舱外活动应急预案。
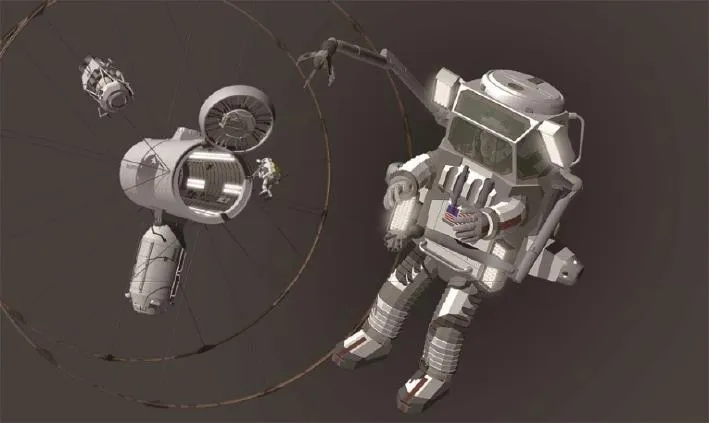
“有人GEO服务”场景设想图
该研究不受NASA当前探索架构的约束,但被允许选择一条适于实现目标的途径,其强调的能力提升亦与为NASA载人航天活动提供开拓性的目标相契合。“有人GEO服务”基础设施组成部分及相关实施技术更具价值,因其有可能推动实现更富成效的载人航天探索途径。
4 结语
在全球范围内,在轨服务已被多个国家和地区空间机构确定为一项支持空间自主性和扩展性的关键能力。数十年来,有人在轨服务为相关技术发展奠定了基础,且在可预见的将来,人类和机器人不可能相互取代。因此,实现有人与自主相结合的在轨服务是未来在轨服务发展的趋势之一。
我国开展在轨服务研究时间较晚,无论研究还是应用都处于起步阶段。当前,在轨服务重大科技专项已经列入我国国家日程,应把握好这次机遇,助推我国空间在轨服务技术乃至空间技术整体和航天工业的发展。
Development and Trend Analysis of Foreign Human Spaceflight On-orbit Servicing Technology