基于Hough变换的红外图像的目标分割
2016-09-01吴梦怡何家溢
吴梦怡,何家溢
(中国传媒大学 信息工程学院,北京 100024)
基于Hough变换的红外图像的目标分割
吴梦怡,何家溢
(中国传媒大学 信息工程学院,北京 100024)
红外图像是根据目标与背景的温度差异而形成,不受光照等其他条件的影响,可全天工作,被广泛应用在各个领域中。但是由于目标和背景的热辐射所造产生的红外图像的分辨率低,对比度差等特点,使红外图像的分割变得较为困难。Hough变换具有对图像中直线的残缺部分、噪声以及其他共存的非直线结构不敏感的特性,具有较强的抗干扰性和鲁棒性。本文提出一种基于Hough变换的红外图像规则目标的检测方法。通过观察红外图像中目标分布情况,估计出目标边界的曲线方程,对该方程进行Hough变换,从而检测出目标并进行分割。利用该方法避免了由于红外图像的目标与背景对比度差、边缘模糊、视觉效果较差等原因造成的不易检测边缘曲线的问题。经实验证明,基于Hough变换的规则的红外目标的检测方法具有可行性,且检测效果好。
红外图像;边缘检测;图像分割;霍夫变换
1 引言
红外图像的获取是根据目标与背景的温度分布情况进行的,它的采集不受光照条件的限制,并且可以克服部分视觉上的障碍而探测到目标,具有较强的抗干扰能力,被广泛应用在各个领域,如在视频监控领域、动目标跟踪领域或红外成像反舰导弹等。但由于红外图像具有像素分辨率低、对比度差、噪声大、图像边缘模糊等特点,准确将红外图像的目标分割是比较困难的。
图像分割算法一般是基于图像灰度值的不连续性或其相似性。根据图像的不连续性进行分割有边缘检测、边界跟踪等方法,常用的边缘检测算子有Roberts算子、Sobel算子、Pewitt算子、Canny算子。根据图像的相似性将图像分割的常用方法有阈值分割、区域生长、区域分裂与合并。
由于红外图像的分辨率低、灰度对比度差、边缘不光滑等特点,一般的基于空域滤波或灰度域值的方法很难将目标和较强的背景干扰区别开来。文献[4][5][6]通过利用Otus和遗传算法相结合的方法,确定最佳阈值,对图像进行分割。文献[1]采用基于区域增长和神经网络的方法分割和识别目标,因计算量较大而难以实际应用。在Kass等人提出的Snakes算法[2]和OSher等人提出的水平集方法[3]的基础上,文献[7]提出了一种改进的水平集模型,用于对红外图像进行分割。文献[8]提出一种基于Sobel算子和蚁群算法相结合的红外图像边缘检测算法。文献[11]结合分水岭变换、小波变换与形态技术,实现红外自动图像分割。文献[9]介绍了一种基于纹理相似度量的图像分割方法。文献[10][12]是以模糊C均值聚类算法为基础,提出的改进的红外图像分割的方法。文献[13]提出基于期望最大化聚类的红外热像分割方法。
Hough提出的Hough变换[14]是一种在图像中定位形状的技术,具有较强的抗干扰性和鲁棒性,被广泛应用于各个领域。在生物医学领域中,Hough变换已被成功应用于基于人工智能的专家诊断系统;X射线人体照片和CT图像的处理和判读;光学显微镜和电子显微镜中的细胞核自动分析系统等。在自动化、机器人视觉领域中,Hough变换已被用于产品部件的自动监视、缺陷诊断、生产过程的自动监控、计算机辅助制造(CAM),例如基于Hough变换的机械零件检测和定位系统;基于Hough变换采用直线、圆弧等作为基本特征的工业产品检查系统。在空间技术、军事防御领域中,Hough变换已被用于运动目标轨迹的检测与识别,高空侦察机、间谍卫星和军事雷达等目标自动识别系统的特征提取,例如应用Hough变换对战斗机的外形特征进行提取和自动识别。在办公自动化领域中,采用Hough变换进行英文字符特征提取并自动识别,其对印刷体字符识别率为99.6%,对手写体字符的平均识别率也达到了86.9%,并已成功应用于邮政信件的自动分拣、文件处理等。
根据红外图像的特性和Hough变换在各个领域被广泛应用的趋势,本文提出一种基于Hough变换的红外图像中目标分割的方法。该方法主要是根据单个目标的形状特点和所有目标的布局情况,根据目标边界,选择合适的曲线方程,利用Hough变换检测目标。
2 霍夫变换原理
Hough变换是一种使用表决原理的参数估计技术。其原理是利用图像空间和Hough参数空间的点—线对偶性,把图像空间中的检测问题转换到参数空间。通过在参数空间里进行简单的累加统计,然后在Hough参数空间寻找累加器峰值的方法检测曲线。Hough变换的实质是将图像空间内具有一定关系的像元进行聚类,寻找能把这些像元用某一解析形式联系起来的参数空间累积对应点。
直线由两点A=(x1,y1)和B=(x2,y2)定义(参见图1)。通过点A的所有直线由y1=kx1+q表示,k和q是某些值。这意味着同一个方程可以解释为参数空间k和q的方程,因此通过点A的所有直线可以表示为方程q=-x1k+y1(参见图2)。类似通过点B的直线可以表示为q=-x2k+y2。在参数空间k和q中,两条直线的唯一公共点是在原图像空间中表示连接A和B的唯一存在的直线。
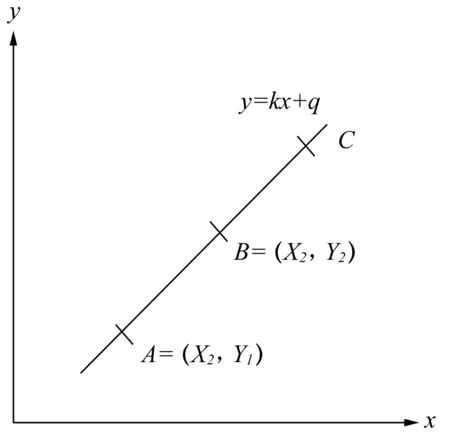
图1 图像空间
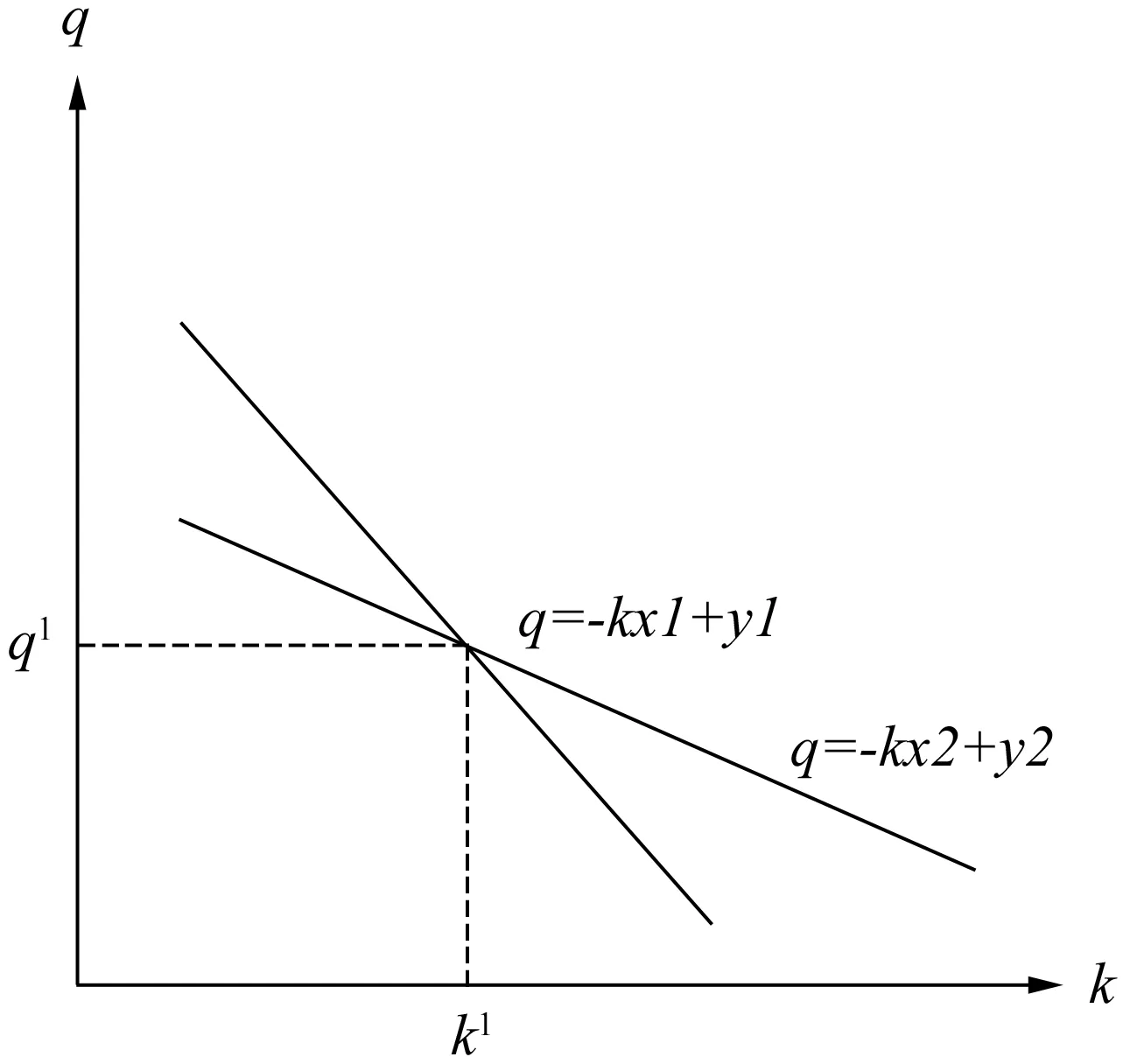
图2 k和q的参数空间
这意味着图像中的每条直线在参数空间k和q中由单独一个点表示,直线的任何一部分都变换为同一个点。直线检测的主要思想就是确定图像中所有的直线像素,将通过这些像素的所有直线变换到参数空间的对应点,在参数空间检测点(a,b),该点是由图像中直线y=ax+b的Hough变换的结果。
一般情况下,我们没有任何有关图像中直线的信息,因此任何方向的直线可以通过任何边缘像素。在真实情况下,这些直线的数目是无限的,然而,为了实际目标,只能根据目标特性考虑有限数目的直线方向。直线的可能方向定义了参数k的一个离散化。类似的,参数q也被采样为有限数目的值。参数空间不再是连续的,而是被表示为矩形的单元。这个单元的阵列被称为累计数组A,它的元素是累计单元A(k,q)。对于每个边缘元素,确定其参数k和q,这些参数表示了通过该图像的允许方向的直线。对于每条这样的直线,直线参数k和q的值用来增加累计单元A(k,q)的值。显然,如果公式y=ax+b,所表示的直线出现在图像中,累计单元A(a,b)的值就会被增加很多次,次数等于直线y=ax+b作为可能通过某个边缘像素的直线被检测到的数目。对于任意像素P,通过它的直线可能是任何的方向k,但是第二个参数q受像素P的图像坐标和方向k所约束。因此,存在于图像中的直线会引起图像中适合的累加单元的值变大,而通过边缘像素的其他直线,它们不对应图像中存在的直线,对于每个边缘像素具有不同的参数k和q,所以对应的累加单元极少被增加。换句话说,图像中存在的直线可以作为累加数组中的高值累计单元被检测出来,检测到的直线参数有累积数组的坐标给出。结果是,图像中直线的检测被变换为累计空间中局部极值的检测。
由于k的取值在解析式为一般方程的情况下没有明确的取值范围,因此通常将直线方程表示成极坐标的形式:
ρ=xcosθ+ysinθ
其中θ是垂直于图像中直线的直线角度,ρ是原点到直线交点的距离,参见图3所示。
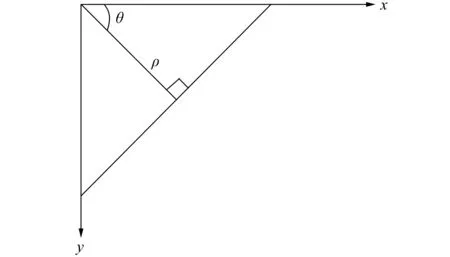
图3 直线的极坐标
该解析式,提供了一种不同的映射函数:在二维累加器数组根据感兴趣的参数θ和ρ,按照正弦波方式投票。即图像中的一条直线上的一个点映射到传统霍夫空间为一条直线转变为映射到极坐标下的霍夫空间为一条正弦曲线。这种替代映射的优势在于:参数θ和ρ的值现在被限定在特定的范围内,θ的取值范围是0~180°,ρ的可能取值由图像大小所决定。
3 曲线的霍夫变换
通过将检测过程中的直线方程替换为一元二次方程,霍夫变换可用于抛物线检测。一般一元二次曲线解析式为:
f(x)=ax2+bx+c
由霍夫变换原理可知,其对应的霍夫方程为c=y-ax2-bx,霍夫空间是一个坐标分别为a、b、c的三维空间,累加器是一个三维累加器(a,b,c)。即图像中的一元二次曲线上的任意一点映射到霍夫空间内为一个平面,曲线上的多个点映射到霍夫空间内为多个平面,平面的交点也就是图像空间内曲线表达式的系数值。也就是说每次像素点的映射结果都使累加器对应的值增加,图像中存在的曲线可以作为累加数组中的高值累计单元被检测出来,检测到的曲线系数由累积数组的坐标给出。结果是,图像中曲线的检测被变换为累计空间中局部极值的检测。选择合适的阈值,筛选出满足条件的曲线边缘。
由于系数a、b、c的值没有明确的取值范围可以限定,因此,本文提出选用一元二次方程的顶点式进行变换,其顶点式表达式为:
f(x)=a(x-h)2+k
其对应的霍夫方程为k=y-a(x-h)2,霍夫空间仍是参数为k、a、h的三维空间,累加器为(a、h、k),此时图像中边缘曲线上一点映射到霍夫空间变为一个曲面,多个点对应多个曲面,曲面的交点为图像中的曲线方程所对应的系数值。累加器(a、h、k)中,h和k对应为原曲线方程的顶点坐标,也就是说h和k的取值由图像大小决定,h最大不能超过图像的宽度,k最大不能超过图像的高度。a对应原曲线方程的系数,a的值可由图像中的曲线的开口大小决定。这种替代映射的优势在于:参数a、h、k的值现在被限定在特定的范围内,取值与图像有关。
4 算法流程图
本文提出的算法可以解决由于红外图像特点所引起的分辨率低,对比度差等其他原因造成的目标检测不准确的问题,具有较强的抗干扰性和鲁棒性。该算法的关键点是根据目标分布情况选择合适曲线方程作为霍夫变换的检测方程,并选择合适阈值筛选极值点,检测出目标曲线,流程图如图4所示,算法步骤为:
第一步,红外图像的提取可以按照红外图像的摄取帧速来提取每一帧图像。
第二步,对图像进行几何失真校正。由于视像管摄像机及阴极射线管显示器的扫描偏转系统有一定的非线性,因此,会造成枕形失真或桶形失真。另外,由于所摄取某场景的图像覆盖面积较大,由于地球表面呈球形,这样摄取的平面图像也将会有较大的几何失真。
第三步,将校正好的图像转化为灰度图像。
第四步,图像增强,由于红外图像的低分辨率,对比度差等特点,直接对图像进行二值化化处理,效果可能不佳,因此要先进行图像增强处理。
第五步,将灰度图像二值化,得到灰度值只有0和255黑白图像,是进行边缘检测的基础。图像二值化过程中阈值的选择直接关系到目标边缘检测的结果,间接影响霍夫变化的检测结果,因此选择合适的阈值是关键。
第六步,图像边缘检测,边缘检测算子有很多种,对于同一种检测算子而言,图像不同,检测的结果也不同。因此要根据图像特点选择合适的检测算子。
第七步,进行霍夫变换,根据目标物理特点和目标的分布情况,选择合适的曲线方程,进行霍夫变换,根据霍夫变换的结果和目标分布情况,选择合适阈值,筛选出目标曲线。
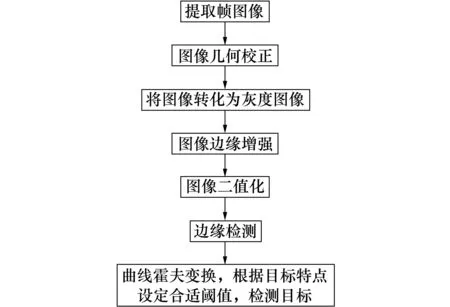
图4 算法流程图
5 实验结果与分析
本文实验采用的是某一电影院放映某一电影的某一段观影现场视频,提取的单帧图像分辨率为704*480,通过提取座位上有人和无人两种情况的图像,来验证霍夫变换在红外图像上的检测性能。本文所有的算法程序均在MATLAB2014开发平台下实现。
图5为提取电影院的无人的座位图,可以看出座位排列整齐,为一行排列方式近似一条抛物线,每一列排列方式近似一条直线,对其进行图像预处理得到图6,图7为经过Canny算子边缘检测处理得到的座位边缘图像,可以看出该图中的边缘基本是连续,只有少部分的边缘是断开的,并且座位几乎没有缺失情况,但是座位边缘不光滑,图8为经过曲线霍夫变换检测的座位行排列的图像,可以看出座位的排数基本被检测出,结合实际情况,根据曲线之间的距离,可以确定电影院座位的排数。

图5 电影院座位图

图6 图像预处理
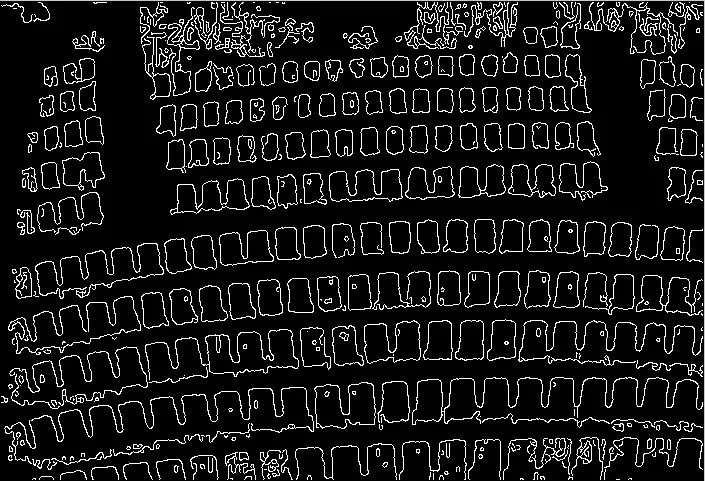
图7 边缘检测图

图8 曲线检测图
当提取有人的座位图像时,如图9所示,通过设置合适的二值化的阈值,选择Roberts算子进行边缘检测,得到的结果如图10所示,由于有人的存在,根据二值化图像检测出来座位边缘有空缺,但是根据存在的座位可以大致估计出座位的排列方式仍为一条曲线,利用曲线霍夫变换,选择合适的阈值,筛选出符合条件的曲线,检测结果如图11所示。该实验说明,尽管有部分边缘的缺失,但是依照总体布局,利用曲线霍夫变换依旧可以将座位排数检测出,进一步验证了霍夫变换具有对图像中曲线的残缺部分、噪声以及其他共存的非直线结构不敏感的特性,具有较强的抗干扰性和鲁棒性。

图9 原始图像
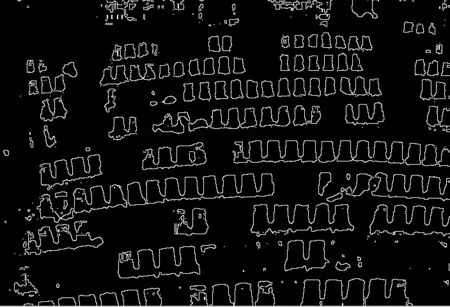
图10 边缘检测图
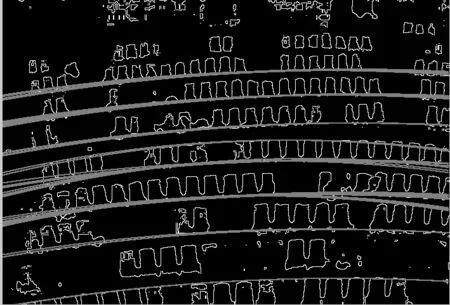
图11 座位上有人的座位检测图像
通过座位上有人和无人的图像的两次检测实验,证明了霍夫变换的确可以解决出由于红外图像的目标与背景对比度差、边缘模糊、视觉效果较差等原因造成的目标边缘缺失或边缘不清晰的问题,验证了霍夫变换具有对图像中曲线的残缺部分、噪声以及其他共存的非直线结构不敏感的特性,具有较强的抗干扰性和鲁棒性。
6 结论
本文提出的基于Hough变换检测红外图像中的目标的方法,通过电影院红外图像中座位的检测实验,利用目标集合的空间分布规律和单个目标的形状特性,验证了霍夫变换具有对图像中曲线的残缺部分、噪声以及其他共存的非直线结构不敏感的特性,具有较强的抗干扰性和鲁棒性,解决了由于红外图像的目标与背景对比度差、边缘模糊、视觉效果较差等原因造成的目标边缘缺失或边缘不清晰的问题,该方法具有可行性,并且检测结果准确。
[1]Correia B,Dinis J,Davies R.Automatic detection and recognition of stationary motorized vehicles in infrared Images[J]. SPIE, 1999,37(18):140-150.
[2]Kass M,Witkin A,and Terzopoulos D. Snakes:Active Contour Models[J]. Computer Vision,1988,1(4):321-331.
[3]OSher S J and Paragios N. Geometric Level Set Methods in Imaging[M]. Vision and Graphics,Springer,New York,2003.
[4]Shunyong Zhou,Pingxian Yang,WenlingXie. Infrared Image Segmentation Based on Otsu and Genetic Algorithm[J]. Multimedia Technology (ICMT),2011,7:5421-5424.
[5]Zhang Chaofu,Ma Li-Ni,Jing Lu-Na. THRESHOLD INFRARED IMAGE SEGMENTATION BASED ON IMPROVED GENETIC ALGORITHM[J].Information Science and Control Engineering (ICISCE),IET International Conference on,2012,12:1-4.
[6]J Xia,J Sun.Infrared Image Segmentation Combining Mutual Information and Genetic Algorithm[J].International Conference on Information Engineering and Computer Science,2009,12:1-4.
[7]X Mei,J Lin,L Zhang,L Xia. Infrared Image Segmentation Algorithm Based on Improved Variational Level Set Model[J]. International Conference on Mechatronics and Automation,2007,8:1224-122.
[8]Dong Wang,Jingzhou Zhang.Infrared image edge detection algorithm based on sobel and ant colony algorithm[J]. Multimedia Technology (ICMT),2011 International Conference on,2011,7:4944-4947.
[9] W B Blanton,K E Barner.Texture-Based Infrared Image Segmentation by Combined Merging and Partitioning[J]. International Conference on Image Processing,2007,9(2):45-48.
[10]S Gupta,A Mukherjee. Infrared image segmentation using Enhanced Fuzzy C-means clustering for automatic detection systems[J]. Fuzzy Systems (FUZZ),International Conference on,2011,6:944-949.
[11]S R Neves,E A B da Silva,G V Mendonca.Wavelet-watershed automatic infrared image segmentation method[J].Electronics Letters,2003,(39):903-904.
[12]L Gang,Z Qianqian,Z Dan. Neighborhood weight fuzzy c-means kernel clustering based infrared image segmentation[J]. Information and Automation (ICIA),International Conference on,2014,(7):451-454.
[13]T J Ramírez-Rozo,J C García-álvarez,C G Castellanos-Domínguez. Infrared thermal image segmentation using expectation-maximization-based clustering[A]. 2012 XVII Symposium of Image,Signal Processing,and Artificial Vision (STSIVA)[C],2012.
[14]Hough P V C.Method and Means for Recognizing complex Patterns[P].US Patent:396954,1962.
[15]Illingworth J,and Kitter J.The Adaprtive Hough Transform[J]. IEEE Trans,PAMI,1987,9(5):690-697.
(责任编辑:马玉凤)
Object Segmentation of Infrared Image Based on Hough Transform
WU Meng-yi,HE Jia-yi
(Information Engineering School,Communication University of China,Beijing 10024)
Infrared image is formed according to the temperature difference between the target and the background. It is not affected by other conditions,such as light and it can work all day. So it is widely used in various fields. However,due to the low resolution and low contrast of infrared image generated by the thermal radiation of the target and background,the segmentation of infrared image becomes more difficult. Hough transform has a strong anti-interference and robustness,which is not sensitive to the incomplete part of the image,noise and other non-linear structures. In this paper,a method for the detection of regular targets in infrared image based on Hough transform is proposed. By observing the distribution of target in infrared image,the curve equation of the target boundary is estimated,then the Hough transform is carried out to detect the target and segment the target. By using this method,it is avoided that the target of infrared image is not easy to detect the edge curve due to the difference of background contrast,blurred edge and poor visual effect. The experimental results show that the infrared target detection method based on Hough transform is feasible,and the detection effect is good.
infrared image;edge detection;image segmentation;hough transform
2016-04-26
吴梦怡(1991 -),女(汉族),河北邢台人,中国传媒大学硕士生.E-mail: 395272549@qq.com
TP391.41
A
1673-4793(2016)04-0020-07
