单相逆变电路单环与双环控制的仿真实验研究
2016-08-30李文娟吴天强于长胜
李文娟, 绳 燕, 吴天强, 于长胜
(哈尔滨理工大学 电气与电子工程学院, 黑龙江 哈尔滨 150080)
单相逆变电路单环与双环控制的仿真实验研究
李文娟, 绳燕, 吴天强, 于长胜
(哈尔滨理工大学 电气与电子工程学院, 黑龙江 哈尔滨150080)
为使逆变电路具有更高的控制精度和更强的带负载及抗负载扰动能力,研究采用闭环控制的单相逆变电路。设计了电压单环和电压电流双环两种控制方案的控制器,并采用极点配置法确定相关参数。利用Simulink仿真模型对比分析了在非线性负载和突变负载情况下单环与双环控制的逆变输出电压和电流的波形。结果表明:双环控制下单相逆变电路电压变化率小、谐波含量少,具有更好的带负载及抗负载扰动能力。
逆变电路; 单环控制; 双环控制; 极点配置法
电力电子技术在一般工业、电力系统、交通运输、通信系统以及新能源系统等方面有着广泛应用[1]。电力电子技术课程是电气工程及其自动化专业的一门专业基础课,其中单相逆变电路是重要的课程内容[2]。
高质量的逆变电路要求输出波形稳态精度高、动态响应快。开环控制的逆变器难以达到这两方面的要求,而闭环控制的逆变器精度高、输出电压电流可控、受系统参数变化影响小[3],因此闭环控制是逆变电路研究的重要方向。目前较为成熟、控制效果较好的控制方案有电压单环PID控制、电压电流双环控制、重复控制、无差拍控制等。电压单环PID控制是较为传统的控制,而电压外环、电流内环的双环控制方案是高性能逆变电源的发展方向之一[4-5]。
比较单环和双环两种控制方案的输出电压、电流波形,可以直观地看出这两种控制方案的优劣。但是,通过硬件实验得到逆变电路输出波形费时且危险;而借助于仿真实验则可以方便地得到输出波形[6],有利于学生掌握逆变电路工作原理和闭环控制方法。本文基于Simulink仿真实验平台分析比较单相逆变电路的两种闭环控制方案的控制性能,通过实验分析,帮助学生理解闭环控制思想,更好地提高电力电子技术课程的教学质量。
1 控制方案设计
1.1控制策略设计
单环控制和双环控制是单相逆变电路闭环控制最常用的两种方式。单环控制以交流侧瞬时电压为被控对象;双环控制为电压外环、电流内环控制[7-8],其中电流环分为电感电流环和电容电流环。对于电感电流内环、电压外环控制系统,负载电流作为逆变器的外部扰动信号处在电流内环之外,因此控制系统对负载扰动的抑制能力较差,造成逆变器的动态性能不理想[9]。而电容电流内环、电压外环控制系统的电容电流被瞬时控制,使得输出电压因电容电流的微分作用而提前得到矫正,因此它抗负载扰动能力强、动态性能好,但是不能通过限流实现对逆变器的保护[10]。
为了解决上述问题,综合两种控制方案,采用带负载电流前馈的电感电流内环、电压外环的双环控制方案,其控制框图如图1所示。

图1 单相逆变电路双环控制框图
电压指令u*与输出电压uo作差,经过电压控制器Gv(s)生成电流指令i*,再与电感电流iL作差并结合负载电流io,经过电流调节器Gi(s)后送入脉宽调制
模块生成PWM信号,经驱动电路后控制逆变电路开关管工作。
uab是直流母线电压Ud经逆变桥PWM调制后输出的高频矩形波,uo是经过滤波器输出的交流正弦波,r为滤波电感等效串联电阻、线路电阻以及死区等其他杂散阻尼因素的综合,io、iL、iC分别是负载输出电流、电感电流、电容电流,Gv(s)、Gi(s)分别是电压环和电流环的控制器,u*为电压指令,i*为电流指令。
单相逆变电路的单环控制比双环控制少了电流环,控制框图与图1类似,不同的地方是控制回路只有一个电压环,这里不再重复给出。
1.2控制器参数设计
目前逆变电路的控制方案多种多样,例如重复控制、无差拍控制等。由于PID控制算法简单、易于控制、鲁棒性能好、控制精度高,能同时保证控制系统有很好的稳态及动态性能,因而是目前逆变电路最通用的控制技术[11]。本文仿真实验中,单相逆变电路电压单环控制采用PID控制器;在双环控制中,内环电流指令的准确度依赖于外环电压差的调节。为了准确跟踪电压指令,电压外环采用PI控制器,电流内环也采用PI控制器代替P控制器,可进一步增强双环控制的抗负载电流扰动能力。
为兼顾系统的稳态性能与动态性能,采用极点配置法设计PID控制器的参数。极点配置法是一种经典的控制系统设计方法,中心思想是将闭环系统的极点配置到预先规定的位置上,使其满足稳定性和控制性能的要求。双环控制参数确定的方法[12]如下。
设电压外环、电流内环的控制器传递函数表示为:
(1)
根据图1可以求出输出电压的闭环传递函数,将式(1)代入可以求得单相逆变电路电压电流双环控制的闭环传递函数为:
(2)
其闭环特征方程为:
D(s)=LCs3+(rC+K2pC)s2+
(3)
双环控制的闭环特征方程(3)是四阶方程,存在两个非主导极点。假设其非主导极点分别为
通常m、n取值范围5~10,此处取n=10,m=8。主导极点为
系统理想的特征方程为
(4)
将此理想特征方程展开,与(3)式比较,使它们逐项相等,并取ζ=0.7,ωn=7 100 rad/s,可得K1p= 1.137,K1i=420,K2p=298,K2i=587 500,则电压电流双环的控制器可表示为:
(5)
在单相逆变电路电压单环控制方案中,闭环传递函数的特征方程为三阶,同样列出系统的理想特征方程,与电压单环控制方案的特征方程逐项对比,可以求得其PID控制器的参数为Kp= 13.5,Ki=51 125,Kd=0.001 3,则电压单环的控制器可表示为:
(6)
极点配置法只为控制器参数的选取确定了大体方向,并不一定是最佳参数。当用极点配置法配置出PID控制器参数后,再在此基础上微调参数,使逆变电路输出电压波形达到最好。
2 建立仿真模型
为了探究单相逆变电路两种控制方案的控制性能优劣,基于Simulink仿真实验平台进行了相关的仿真实验。
在Simulink仿真实验平台上分别构建单相逆变电路的电压单环和电压电流双环控制系统的仿真模型。电压电流双环控制系统的仿真模型如图2所示。图2中Subsystem是控制子系统,PWMcreate是PWM波生成的子系统,load是负载。电压单环控制系统的仿真模型与电压电流双环控制系统的仿真模型相似,不同之处在于控制子系统。其中电压单环的控制子系统是电压指令与输出电压的差值经过PID控制器生成调制波送入PWM波形生成模块;而电压电流双环的控制子系统是电压外环生成电流指令,电流内环生成调制波。这里不再重复给出电压单环控制系统的仿真模型。两仿真模型的PWM波形生成子系统模型如图3所示。负载分为线性负载和非线性负载,仿真模型模拟了单相逆变电路带电容的二极管整流性负载和突变负载时的工作情况,其中突变负载模型如图4所示。
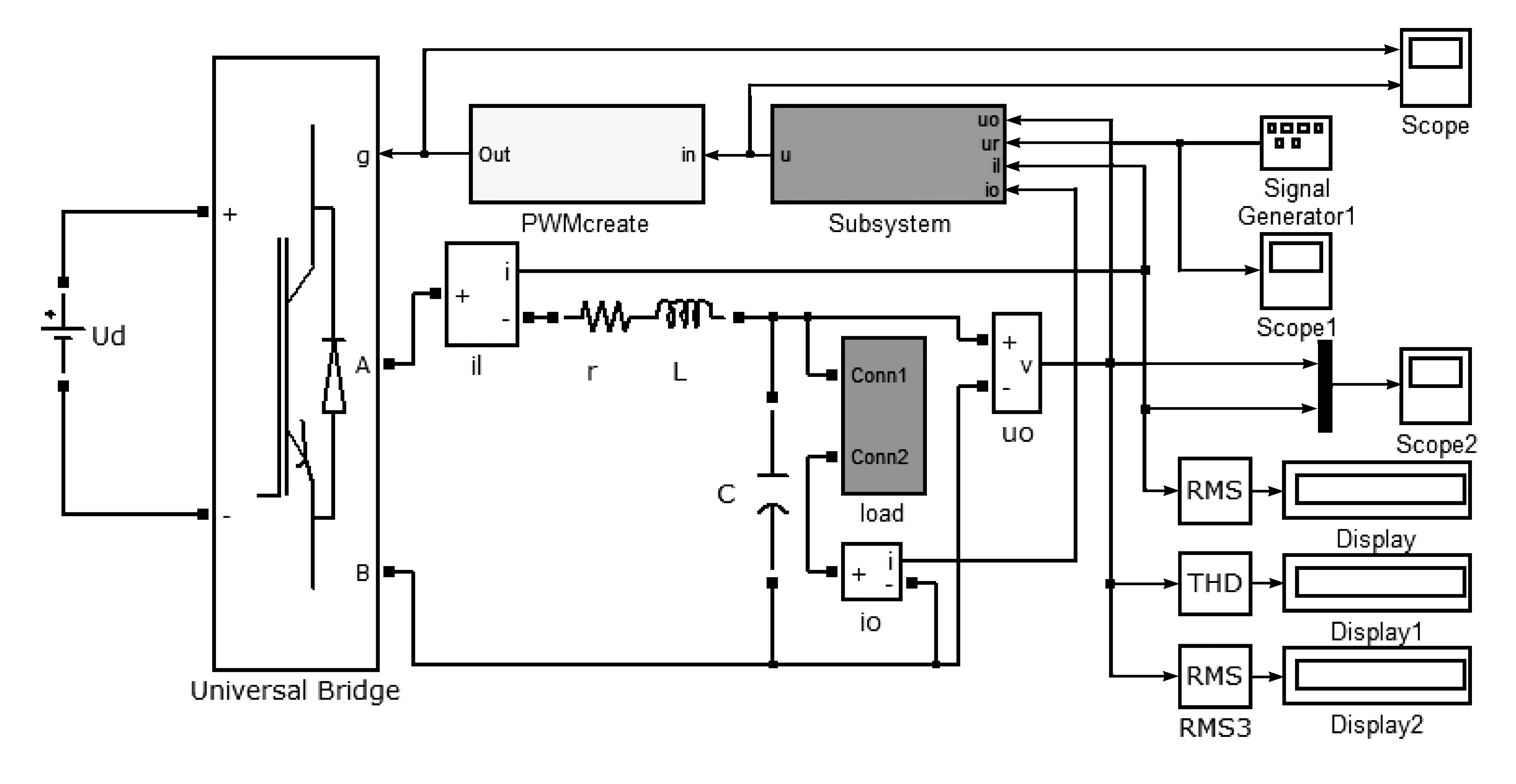
图2 电压电流双环控制仿真模型
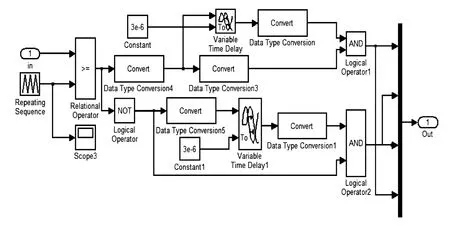
图3 PWM波生成子系统
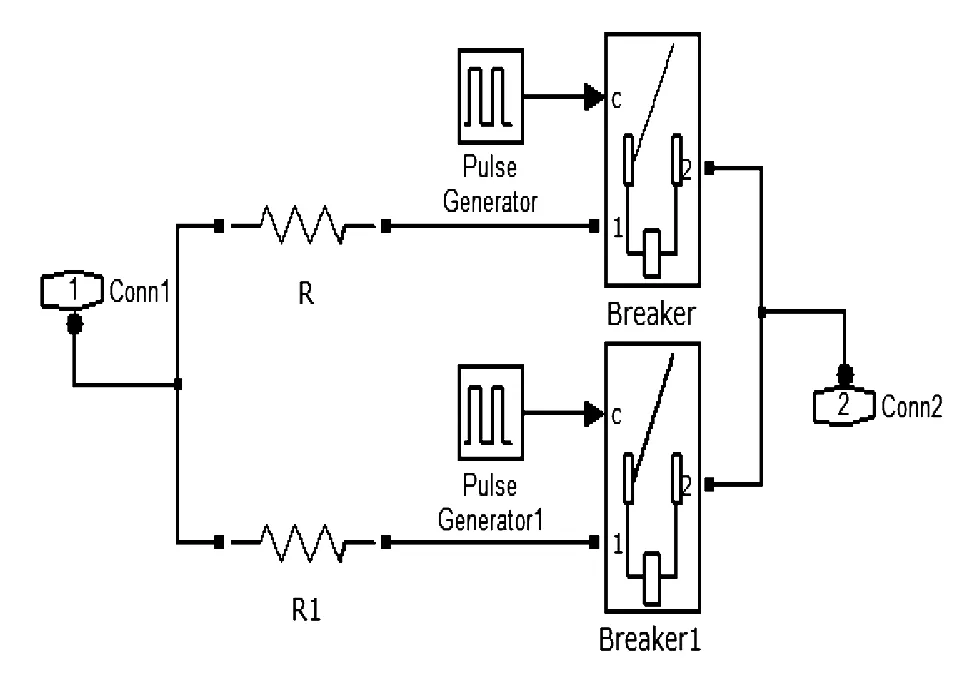
图4 突变负载模型
3 仿真结果及分析
在上述两种控制方案的仿真模型中选取如表1所示的仿真参数,可以得到不同负载下的仿真波形。

表1 单相逆变电路仿真参数表
在用极点配置法求得的控制器参数基础上进行微调,使输出电压和电流效果最佳。当负载为带电容的二极管整流性非线性负载时,两种控制方案的输出电压电流波形如图5所示。
由图5可见,电压电流双环控制的单相逆变电路输出电压、电流波形更稳定、谐波含量更少。从仿真运行结果可以得到:电压电流双环控制的单相逆变电路输出电压有效值Uo=227.7V,电压变化率为3.5%,总谐波畸变率THD=2.3%;电压单环控制的单相逆变电路输出电压有效值Uo=226.5V,电压变化率为3%,THD=7.84%。这说明单相逆变电路电压电流双环控制比电压单环控制带非线性负载能力强,输出电压电流波形效果更好。综上所述,带非线性负载时电压电流双环控制优于电压单环控制。
为检验两种控制方案抗负载扰动能力,对突变负载的情况进行仿真。仿真开始时为空载,0.025s时加入半载,0.045s时加入满载。两种控制方案在负载变化时的动态响应如图6所示。为观察方便,图中电流波形放大了20倍。
由图6可见,电压电流双环控制的单相逆变电路输出电压波形比较理想,电流波形在负载突变时有轻微的振荡,但是很快回稳。电压单环控制的单相逆变电路输出电压波形从第二个周期开始不稳定,谐波含

图5 非线性负载时输出电压电流波形
图6 突变负载时输出电压电流波形
量增加,电流波形始终振荡严重,响应时间慢。满载时,电压电流双环控制的单相逆变电路输出电压有效值Uo=219.9V,电压变化率为-0.05%,THD=0.08%;电压单环控制的单相逆变电路输出电压有效值Uo=224.5V,电压变化率为2%,THD=2.5%。这表明负载突变时单相逆变电路电压电流双环控制比电压单环控制输出的电压电流波形效果更好、动态响应更快。
4 结束语
通过Simulink仿真实验,对比了单相逆变电路电压电流双环和电压单环两种控制方案。从两种控制方案带非线性负载和带突变负载的输出电压电流波形及电压指标可以看出,单相逆变电路在电压电流双环控制下的输出电压电流波形效果、动态响应速度以及电压指标均优于电压单环控制。借助Simulink仿真实验平台辅助逆变电路教学,不但仿真波形的获取容易、准确,更能直观地观察到不同控制方案对逆变电路输出波形的影响,对指导学生学习闭环控制的思想、使学生更深入地掌握逆变电路工作原理有重要的作用。
References)
[1] 苏良昱,王武,葛瑜.电力电子技术仿真实验教学与创新思维拓展[J].实验技术与管理,2013,30(1):170-173.
[2] 李文娟,刘铜振,张经纬,等.单闭环单相PWM逆变系统的Saber仿真实验[J].实验技术与管理,2015,32(8):109-111.
[3]HuangYushui,DingXiongyong,XinYugang.Adigitalon-lineUPSbasedoninvertercontrolwithloadcurrentfeed-forward[J].ControlEngineeringofChina,2009,16(S2):14-17.
[4] 鲍陈磊,阮新波,王学华,等.基于PI调节器和电容电流反馈有源阻尼的LCL型并网逆变器闭环参数设计[J].中国电机工程学报,2012,32(25):133-142.
[5] 周樑.PWM逆变电源瞬时值反馈控制技术研究[D].武汉:华中科技大学,2006.
[6] 文小琴,毕淑娥,游林儒.基于Matlab的电力电子技术仿真平台设计[J].电气电子教学学报,2014,36(4):105-106,110.
[7] 喻晨龙,鞠志忠,祁承超.两种逆变器双环控制技术比较分析[J].通信电源技术,2013,30(5):9-12.
[8] 谢芬,鲁杰,潘丽.基于Simulink库仿真的单相逆变电源调节器设计[J].电子设计工程,2012,20(10):22-25.
[9] 林涛,王彦章.双闭环逆变器控制策略仿真研究[J].电子科技,2014,27(7):120-123.
[10] 李鑫,姚勇涛,张逸成,等.采用电容电流内环的逆变器双闭环控制研究[J].电气传动,2008,38(2):23-25.
[11] 王淑惠,彭力,康勇,等.基于极点配置PI数字双环PWM逆变器的研究[J].电源技术应用,2008,11(9):34-39.
[12] 罗军,姚蜀军,宋杨,等.基于极点配置的三相电压型逆变器控制策略研究[J].通信电源技术,2014,31(4):15-18.
Studyonsimulationexperimentofsingle-loopanddouble-loopcontrolofsingle-phaseinvertercircuit
LiWenjuan,ShengYan,WuTianqiang,YuChangsheng
(CollegeofElectricalandElectronicEngineering,HarbinUniversityofScienceandTechnology,Harbin150080,China)
Fortheinvertercircuit’shighercontrolprecisionandstrongerloadingandantiloaddisturbancecapacity,theclosed-loopcontrolofsingle-phaseinverterisstudied.Takingtwocontrolschemesofvoltagesingle-loopandvoltagecurrentdouble-loop,thecontrollersofthesetwoschemesaredesignedandthecorrespondingparametersaredeterminedbythepoleassignmentmethod.Thesimulationmodelsofsingle-loopanddouble-loopcontrolsystemwithsingle-phaseinvertercircuitarebuiltintheSimulinksimulationplatform.Thewaveformsoftheoutputvoltageandcurrentofthesingle-loopanddouble-loopcontrolundertheconditionofnonlinearloadandmutationloadarecomparedandanalyzed.Thesimulationresultsshowthatunderthedouble-loopcontrolthevoltagechangerateofsingle-phaseinvertercircuitissmall,andtheharmoniccontentislow,whichhasbetterloadingandantiloaddisturbancecapability.
invertercircuit;singleloopcontrol;doubleloopcontrol;poleplacementmethod
DOI:10.16791/j.cnki.sjg.2016.07.027
2015-11-21
黑龙江省学位与研究生教育教学改革资助项目(JGXM_HLJ_2015060)
李文娟(1968—),女,黑龙江哈尔滨,博士,教授,主要研究方向为电力电子装置与系统和成像质量评价.
TM464
A
1002-4956(2016)7-0114-04
虚拟仿真技术探索与实践