A320飞机电传操纵系统概述
2016-08-29蜜中国民用航空飞行学院航空工程学院周蜜硕士中国民航飞行学院航空工程学院讲师研究方向为民用飞机构造与设计研究
周 蜜中国民用航空飞行学院航空工程学院周蜜,女,硕士,中国民航飞行学院航空工程学院讲师,研究方向为民用飞机构造与设计研究。
A320飞机电传操纵系统概述
周 蜜
中国民用航空飞行学院航空工程学院
周蜜,女,硕士,中国民航飞行学院航空工程学院讲师,研究方向为民用飞机构造与设计研究。


link
评估值21万
appraisement
行业曲线
industry
point
本文简要介绍了A320飞机电传操纵系统的组成。详细描述了A320飞机飞行操纵面作动器的控制模式;阐述了操纵面与作动器、飞行控制计算机之间的对应关系,同时介绍了多台计算机之间接管控制的优先顺序。对于民航业内从业人员及相关科研人员,本文有一定的参考意义和使用价值。

A320飞机采用电传操纵系统,应用多台飞行控制计算机和多个作动器构成余度系统,极大地保证了航空飞行的安全性和可靠性。本文介绍了A320飞机飞行操纵面作动器的三种控制模式:主动伺服模式、阻尼模式和定中模式;阐述了操纵面与作动器、飞行控制计算机之间的对应关系,同时介绍了多台计算机之间接管控制的优先顺序。
飞机飞行操纵系统是用于传递驾驶员的操纵指令,驱动位于不同翼面上的舵面偏转,从而实现控制飞机姿态的系统。近100年来,飞行操纵系统经历了无助力机械操纵系统、助力机械操纵系统、不可逆助力操纵系统、增稳和控制增稳系统以及电传操纵系统(Fly-by-Wire,FBW),五个发展阶段。
电传操纵系统
电传操纵系统产生于上世纪50年代末,是较为先进的飞行操纵系统。在电传操纵系统中,飞行员对脚蹬、侧杆或驾驶盘的操纵信号,经杆力或杆位移传感器转变为电信号,传递给飞行控制计算机,飞行控制计算机将生成的控制指令输送到液压助力器,由液压助力器驱动舵面偏转。同时液压助力器及操纵面的响应信号,回输到飞行控制计算机,用于反馈控制,使飞机能够更加精准地受控于电传操纵系统。
与传统的简单机械式操纵系统和液压助力机械式操纵系统相比,电传操纵系统重量更轻,维护更为简便,更便于精微操纵信号的传递,而且系统对于飞机具有完全的控制权限,使飞机兼顾较好的操纵性与稳定性。目前采用电传操纵的民用客机有A320、A330、A340和B777等。A320飞机率先在民用运输机领域采用电传操纵系统,这在民用飞机的发展史上具有里程碑式的意义。
A320电传操纵系统
A320飞机电传操纵系统应用侧杆代替传统驾驶盘,采用多台飞行控制计算机、三套液压系统和三套三相电源系统。其中,飞行控制计算机根据正常、备份或直接控制律处理飞行员和自动驾驶仪的输入,控制并监控飞行操纵面,同时记录和存储飞行中产生的故障。在飞行控制计算机中,2台升降舵副翼计算机(Elevator Aileron Computer,ELAC)和3台扰流板升降舵计算机(Spoiler Elevator Computer,SEC)控制飞机的滚转和俯仰运动。ELAC用于升降舵、安定面及副翼的正常控制;SEC用于控制扰流板,并作为备份计算机控制升降舵和安定面。2台飞行增稳计算机(Fly Augmentation Computer,FAC)控制方向舵,实现对飞机偏航运动的控制。2台襟缝翼计算机(Slat Flap Control Computer,SFCC)控制襟缝翼。
图1为A320电传操纵系统总体架构示意图,给出了飞机机翼和尾翼上所有舵面、作动器与飞行控制计算机间的对应关系。在A320电传操纵系统中,除方向舵配平作动器、方向舵行程限制作动器和水平安定面伺服马达由电力驱动以外,其余作动器均由液压系统提供动力。
如图1所示,一般情况下,某一作动器由一台计算机控制,而对于左、右升降舵,每个作动器由一台ELAC控制的同时还有一台SEC在进行备份。四台计算机(ELAC1、ELAC2、SEC1、SEC2)参与了飞机俯仰姿态的控制,这也充分体现了电传操纵系统的多余度设计思想。
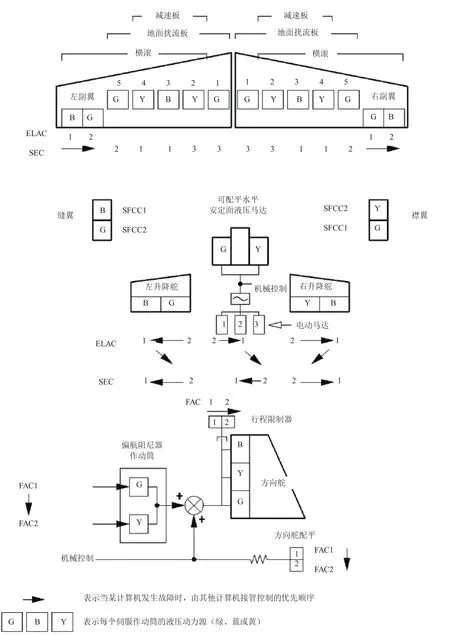
图1 A320电传操纵系统总体架构
每个副翼、升降舵以及偏航阻尼器均由两个液压作动器作动。每个作动器有两种控制方式:主动伺服模式和阻尼模式。在系统正常工作情况下,舵面仅由一个作动器作动,我们称这个作动器处于主动伺服模式,此时作动器由计算机电气控制。另一个作动器随舵面偏转而运动,我们称这个作动器处于阻尼模式。若正在工作的作动器失效,则处于阻尼模式的作动器变为主动伺服模式,而失效的作动器自动转换至阻尼方式。
对于驱动升降舵的作动器,它们除了具有主动伺服模式和阻尼模式之外,还有第三种模式,即定中模式。当仅能采用人工方式进行俯仰配平时,水平安定面后缘的升降舵则处于定中模式,升降舵作动器使其处于中立位。如果两个升降舵作动器都无电气控制,它们都将自动地转换至定中模式。如果两个作动器都无液压操纵,它们都将自动地转换至阻尼模式。
飞机俯仰运动由副翼和飞行扰流板控制。以左副翼为例,当系统正常工作时,由ELAC1控制蓝液压系统作动器驱动副翼偏转,此时该作动器处于主动伺服模式,绿液压系统作动器处于阻尼模式。若蓝液压系统失效,则绿液压系统作动器工作,并处于主动伺服模式,蓝系统作动器处于阻尼模式,在绿系统作动器带动下随动工作。若ELAC1失效,根据箭头方向,左副翼的控制将自动转换到ELAC2。若两台ELAC都失效,两个副翼作动器都将处于阻尼模式。每个飞行扰流板由一台相应的SEC控制。
飞机的俯仰运动由升降舵和可配平水平安定面控制,升降舵由液压助力器作动,可配平水平安定面由1、2、3号电动机中的一台控制两个液压马达,驱动水平安定面偏转。正常情况下是由ELAC2生成控制指令对相应的液压助力器或电动机进行控制。若ELAC2计算机失效,将按照ELAC1、SEC2、SEC1的顺序对俯仰运动进行接管控制。
飞机的偏航运动由方向舵控制,方向舵的控制信号来自于方向舵脚蹬的机械控制信号、偏航阻尼器作动筒输出信号和方向舵配平电动机输出信号的机械叠加,生成的控制信号通过三个液压助力器驱动方向舵偏转。方向舵行程限制器由电动机驱动。随着飞机飞行速度的增加,方向舵的最大偏转角度受到行程限制器的控制而减小。行程限制器、偏航阻尼器及方向舵配平受到FAC控制,计算机失效时的接管顺序为FAC1、FAC2。
结束语
A320飞机开创性地采用了电传操纵系统,其核心部件为飞行控制计算机。A320飞机应用多台飞行控制计算机,使用三套液压系统和三套三相电源系统,采用余度技术构成飞机电传操纵系统,保证了系统的可靠性。A320飞机的飞行操纵面一般由不同液压系统的多个液压驱动装置驱动,且每个操纵面可由多个计算机控制。当计算机失效时,可由备份计算机按接管控制的优先顺序对相应作动器进行控制,极大地保证了飞行的安全性和可靠性。
10.3969/j.issn.101- 8972.2016.12.010