机械臂关节驱动组件一体化结构设计
2016-08-28杨素香王孝利王红香
杨素香 ,冯 旭 ,王孝利 ,王红香
(1.中国电子科技集团公司第二十一研究所,上海 200233; 2.中国人民解放军驻上海航天局中心军代室,上海 200100)
机械臂关节驱动组件一体化结构设计
杨素香1,冯 旭1,王孝利2,王红香1
(1.中国电子科技集团公司第二十一研究所,上海 200233; 2.中国人民解放军驻上海航天局中心军代室,上海 200100)
介绍了一种机械臂关节驱动组件,由无刷直流电动机、行星减速器、角度传感器(旋转变压器)和电磁制动器组成。集驱动、减速、传感和制动为一体,提出了关节驱动组件的一体化设计思路。无刷直流电动机与角度传感器之间增加抗干扰设计,实现了强弱电信号的隔离。样机测试结果表明,该驱动组件体积小、重量轻、控制精度高、运行平稳,可满足各类机械臂关节驱动机构的要求,具有重要的应用价值。
机械臂关节;驱动组件;一体化结构设计
0 引 言
随着计算机、自动化技术和原子能技术的飞速发展,机器人被广泛应用于航空航天、工业自动化和智能装备等行业,在军事和国民工业领域有着广阔的发展前景[1-7]。
在机器人工业中,机械臂作为机器人操作的支撑部件,为末端操作器的精确运动提供技术支撑。机械臂关节是保证机械臂运动能力、运动精度、运动平稳性以及运动安全性等一系列问题的关键[8-10]。目前针对高精度伺服控制的机械臂关节控制需要具备操作灵活、控制方便、搜索定位准确、具有一定抓取力的要求,传统的多部件实现已经不能满足要求。因此,需要一种新型驱动组件保证机械臂关节驱动具有更小的体积、更轻的重量,实现多功能高精度驱动,同时满足关节驱动低速稳定性、定位精度高、具有锁定功能的系统要求。本文介绍了一种一体化结构的机械臂关节驱动组件,以无刷直流电动机作为动力源,角度传感器(旋转变压器)作为伺服驱动位置、速度传感器,齿轮机构作为减速大转矩输出部件,电磁制动器部分作为在运动机构的锁定控制。通过一体化结构设计,体积更为紧凑、重量轻、控制精度高,经减速后可直接驱动负载,回差低,减少了传动功率损耗,提高了驱动组件的工作效率。
1 关节驱动组件结构
关节驱动组件由无刷直流电动机、行星减速器、角度传感器、电磁制动器4部分组成,其结构图如图1所示。驱动主体采用可靠性高无刷直流电动机,通过一级减速达到大转矩输出的性能要求,为满足精度控制要求,选用旋转变压器作为角度、速度传感器,同时采用电磁失电制动器实现驱动电机断电后关节的姿位保持。
2 驱动组件一体化设计
2.1一体化布局结构设计
关节驱动组件由4部分组成,为达到结构紧凑、体积重量小、多功能部件各指标的实现,结构设计过程中需遵循以下设计:
(1)为达到旋转变压器精度、制动力矩、输出效率、回差、重量指标要求,根据各部件要求,结合各部件的指标实现的关键,合理分配各部件指标。
(2)为实现大转矩输出特性,无刷电机与减速器之间进行效率、重量的合理匹配,确定最佳效率点的参数分配,之间采用齿轮头与紧固件连接。
(3)旋转变压器作为精度控制位置传感器,其输出信号的正弦性好坏直接影响到速度稳定性的控制精度,为避免无刷电机运行过程中对旋转变压器弱磁信号的干扰,在两者之间采取隔离措施。
(4)电磁制动器作为实现电机组件具有锁定功能部件,为满足旋转变压器信号调整的可操作性,同时满足电磁制动器工作气隙的调整,在电机组件布局上将电磁制动器安放在尾部。
(5)为实现多部件之间的安全、合理连接,驱动组件采用同轴连接方式,即无刷直流电动机、角度传感器、电磁制动器共轴,通过两个滚动轴承实现转轴支撑,该种连接方式具有结构紧凑、安装可靠的特点。
(6)各部件之间的连接采用紧固件连接,电磁制动器的静铁心作为组件的后端盖,护盖安装在电磁制动器定板上,可有效减少组件轴向长度,同时可降低对细长轴加工带来的困难。
2.2各部件结构设计
2.2.1 无刷直流电动机
驱动组件的动力源采用高可靠性的无刷直流电动机,无刷电机结构采用内转子正弦波结构电机,8极30槽,不等气隙、分数槽绕组形式,转子采用钐钴永磁体,该结构电机具有齿槽力矩小,绕组正弦性好、低速运行平稳、效率高等特点,同时为满足高精度控制的要求,位置传感器采用分装式旋转变压器,结构简单、安装方便、精度高。结构如图2所示。
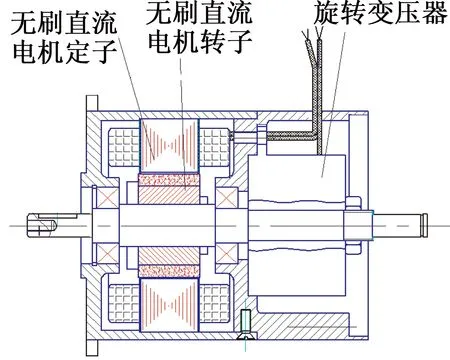
图2 无刷电机结构图
2.2.2 行星减速器
为了使整个组件体积小、重量轻、输出扭矩大,行星减速器采用一级渐开线齿轮行星传动,2K-H结构,选用NGW型式,该型式由内外啮合和公用行星轮组成。它的结构简单、轴向尺寸小,工艺性好,效率高。NGW型是动力传动中应用最多、传递效率最大的一种行星传动。结构如图3所示。输出轴、圆柱销和垫圈一体化设计,内齿轮和轴承座一体化设计,这样减少了零件数量,提高了部件强度,提高了产品可靠性。为了提高传动效率,将运动副支承选用滚动摩擦,行星轮与销轴之间装上滚动轴承。

图3 减速器结构图
2.2.3 电磁制动器
电磁制动器作为驱动组件的锁定机构,为实现驱动组件高可靠运行,防止电磁制动器产生更多的摩擦粉尘污染轴承等运动部件,结合摩擦粉尘产生的原理,摩擦粉尘产生有两部分组成,一部分由制动时瞬时的高温高压下摩擦材料与制动盘材料间的相互磨损而产生的。另一部分是由于制动盘无轴向锁定装置而在高速旋转时左右碰撞摩擦环而产生的。第一种情况磨损只能减少不能避免。对于第二种情况下的磨损则是可以避免的。

图4 电磁制动器结构图
通过采用将高速旋转的制动盘限制在。定板组件的摩擦环和动铁心组件的摩擦环之间,在制动盘高速旋转时不致碰撞它两端面的摩擦环。所以,在此种限位机构的应用下第二种情况就不产生摩擦粉尘了。
制动盘限位机构由挡板、弹簧片、非金属垫板、铆钉组成。当制动器制动时动铁心组件在压力弹簧的作用下迫使制动盘压向定板组件,同时制动盘压迫弹簧片使之产生形变并提高弹簧片弹性势能。当解锁后动铁心组件在静铁心组件产生的电磁力作用下吸靠静铁心组件,同时弹簧片在前期集聚的弹性势能作用下将制动盘推离定板组件而靠紧挡板。在此挡板的限制下使得旋转的制动盘处于定板组件的摩擦片和动铁心组件的摩擦片之间,该旋转的制动盘将不与两端面的任何个摩擦片接触。所以该制动盘将进行无摩擦和无摩擦噪声高速旋转工作,在此状态下不产生解锁旋转时摩擦粉尘。
2.2.4 部件隔离抗干扰设计
驱动组件在工作过程中,组件内部的角度传感器输出为模拟量的弱电信号,无刷电机在启动、停止时会产生大电流冲击,产生强磁场,旋转变压器输出信号容易被周围磁场干扰,使输出的信号畸变。而该信号是保证驱动源无刷电机正常工作的关键,因此,为了防止无刷电机工作产生的磁场干扰角度传感器输出,影响无刷电机正常换向,需对两部件之间进行磁场隔离处理,结构图见图2,旋转变压器机壳作为隔离材料,应选用不导磁的材料进行磁场隔离,同时该机壳作为轴承支撑用结构件,对机械强度有一定要求,一般选用铝合金或不锈钢作为结构件。通过观察无刷电机在启动、停止时旋转变压器失真度的分析、测试,通过磁场隔离后,旋转变压器信号的失真度为0.45%~0.54%,基本不会被干扰,隔离方案是合理有效的。
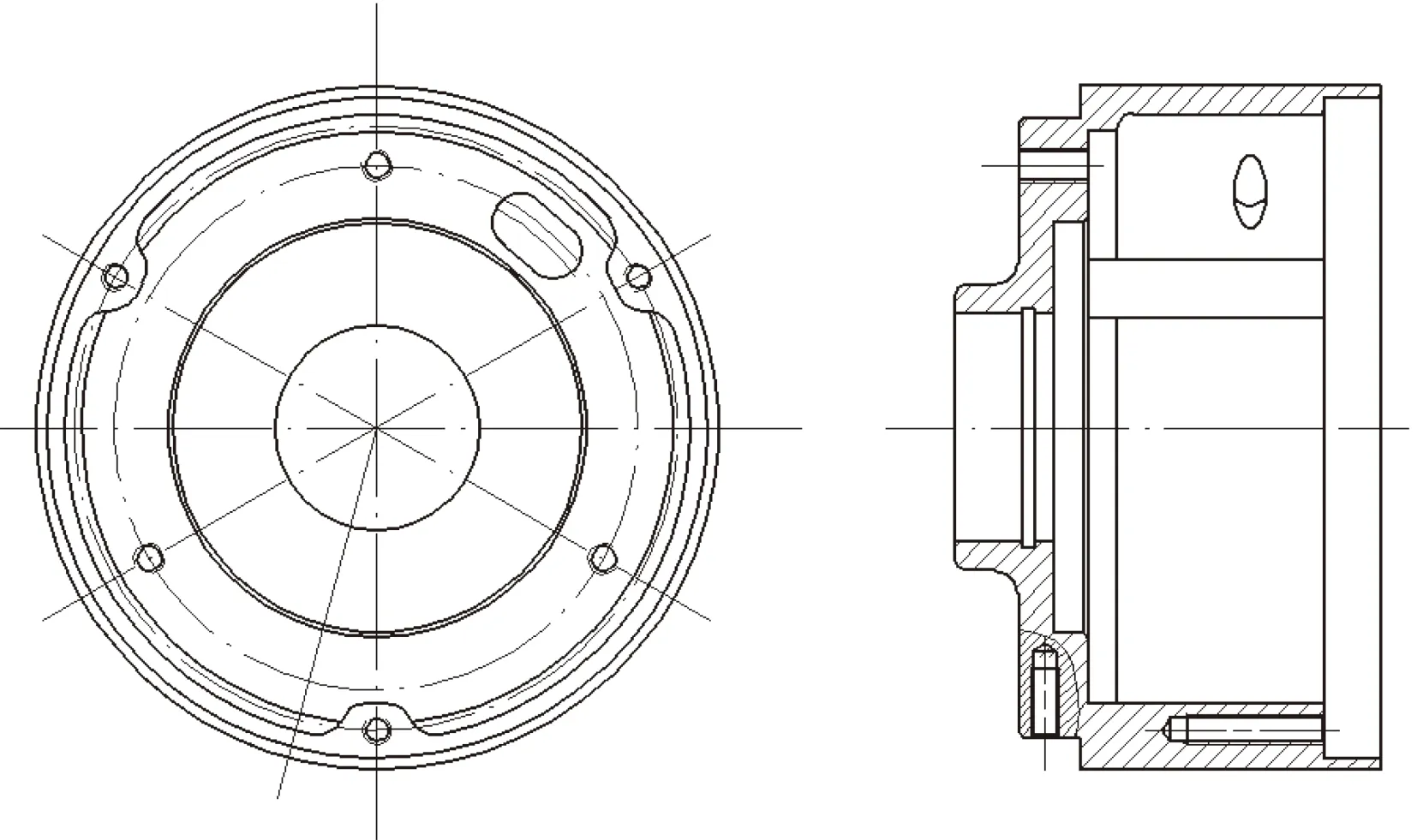
图5 隔离材料结构图
3 样机测试
所研制关节驱动组件产品已成功应用于某机械臂关机机构中。图6(a)~(e)为样机实物照片。表1为样机主要测试结果。

(a)无刷电机(b)行星减速器

(e) 驱动组件

指标要求值实测值额定转矩T/(N·m)0.60.6额定转速n/(r·min-1)600617额定电流i/A≤2.51.52效率≥70%71.1%传动精度≤32制动电压u/V1212制动力矩T/(N·m)≥0.63.2制动功耗P/W≤54.56制动方式断电制动断电制动激磁频率f/Hz50005000电气误差±10%+6%尺寸≤φ60mm×130mmφ60mm×127mm重量m/kg≤1.51.44振动试验3.3g(5~15Hz);10g(15~50Hz);30g(50~80Hz);10g(80~100Hz)冲击试验+6dB/oct(10~500Hz)500g(500~3000Hz)
样机的性能测试结果表明,本文提出的一体化结构驱动组件是可行的,具有体积小、重量轻、控制精度高、输出功率大等特点。
4 结 语
本文介绍了一种多功能一体化结构的关节驱动组件,驱动组件由无刷直流电动机、行星减速器、电磁制动器、角度传感器(旋转变压器)组成,可有效降低关节驱动组件的体积、重量,适合各类机械臂关节驱动应用。对关节驱动组件的一体化结构、电磁制动器结构形式、防止相互干扰等进行了结构分析、设计。样机测试结果表明,该一体化结构驱动组件体积小、重量轻、控制精度高、运行平稳,可满足机械臂关节驱动机构的要求,具有重要应用价值。
[1] 蔡自兴.机器人学[M].北京:清华大学出版社,2003.
[2] 张文辉,叶晓平,季晓明,等.国内外空间机器人技术发展综述[J].飞行力学,2013(6):198-202.
[3] 柳长安,李国栋,吴克河,等.自由飞行空间机器人研究综述[J].机器人,2002(7):380-384.
[4] 赵亮,闫华晓,俞剑江.基于关节模块的模块化工业机器人[J].工艺与装备,2008(9):63-67.
[5] 张云飞,邢军,杜蕴莹,等.带电更换悬垂串绝缘子遥控机器臂研制开发[J].江苏电机工程,2009(3):14-15, 19.
[6] 宁英豪,温淑花.基于人机合作的机器人容错性能的研究[J].机械工程与自动化,2013(8):65-68.
[7] MAGNANI P,RUSCONI A,Design and development of an integrated joint for the dextrous robot arm[C]//Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation,2006:180-184.
[8] 王宏源.机械臂关节用永磁无刷直流电动机的研究[D].哈尔滨:哈尔滨工业大学,2006.
[9] 赵岑.应用于空间机械臂的行星减速器设计与研究[D].哈尔滨:哈尔滨工业大学,2011.
[10] 陈泓.空间机械臂关节制动器的研制与实验研究[D].哈尔滨:哈尔滨工业大学,2011.
IntegrationMechanicalDesignofManipulatorJointDrivingGroupware
YANGSu-xiang1,FENGXu2,WANGXiao-li2,WANGHong-xiang1
(1.No.21 Research Institute of CETC,Shanghai 200233,China; 2.Miltary Repersentative Office in Shanghai Aerospace Burean,Shanghai 200100,China)
A manipulator joint driving groupware is recommended in this paper, which consists of a brushless permanent-magnet motor (BLPM), a planetary gear, a rotary transformer (RT) and an electromagnetic brake. The mechanical design of the manipulator joint driving groupware is presented for integrating the abilities of driving, deceleration, transducing and braking. Besides, the anti-jamming design is used for the connection between the BLPM and RT, which makes their electrical signals insulated between each other. The results of the prototype tests indicate that, the merits of the driving groupware, small volume, light weight, high control precision and steady operation, meet the demands of various manipulator joints with significant application value.
manipulator joint; driving groupware; integration mechanical design
2015-12-03
TM33
:A
:1004-7018(2016)11-0043-03