四轮独立驱动电动车控制系统设计与研究
2016-08-28赵志刚骆志伟胡小龙杨松樸
赵志刚,骆志伟,胡小龙,何 刚,杨松樸
(北京航天发射技术研究所,北京 100076)
四轮独立驱动电动车控制系统设计与研究
赵志刚,骆志伟,胡小龙,何 刚,杨松樸
(北京航天发射技术研究所,北京 100076)
四轮独立驱动电动汽车由于采用4个轮毂电机作为驱动电机,车轮的转速和转矩可以通过电机反馈得出,能够实现单个车轮的独立控制,在车辆控制策略制定、主动控制安全和制动能量回馈等方面具有明显优势。通过驱动力矩和和制动力矩的合理计算和分配控制以达到提高整车经济性能的目的;通过轮速补偿估算策略,使得四轮独立驱动电动车的滑转率计算更加准确,对于提高车辆行驶安全性具有十分重要的价值。
四驱电动车;转速估算;滑转率控制
0 引 言
四驱电动车采用轮毂电机的驱动方式,具有很多优点,比如每个车轮可以进行单独驱动控制、车轮的转速和转矩可以测得、比传统汽车机构简单等显著特点,从而能够更好地运用车辆动力学原理,制定车辆控制策略,实现车辆的主动安全控制和能量回收利用,独立驱动控制逐渐成为电动汽车发展的热点。
本文简要介绍了四驱电动车控制系统的组成,通过驱动力矩和和制动力矩的合理计算和分配控制以达到提高整车经济性能的目的;通过轮速补偿估算策略,使得四轮独立驱动电动车的滑转率计算更加准确,对于提高车辆行驶安全性具有十分重要的价值。
1 四驱电动车控制系统
四轮独立驱动电动车采用4个轮毂电机作为驱动电机,车轮可以进行单独控制,车轮的转速和转矩可以通过电机反馈得出,在车辆控制策略制定、主动控制安全和制动能量回馈等方面具有明显优势。
1.1硬件构成
四轮电驱车驱动系统由驱动控制系统、能量管理系统和监视系统组成。
驱动控制系统负责由驱动控制器根据采集的模拟信号判断驾驶员意图及车辆行驶状态,对各驱动电机进行转矩控制,给各电机控制器下发控制信号,完成电机驱动行驶控制。组成部分包括启动开关、油门踏板、制动踏板、方向盘、集中控制器、电机控制器、驱动电机等。
能量管理系统负责实现多能量源管理、回馈制动、智能配电、蓄电池健康管理技术等功能。组成部分包括蓄电池组、充电机、智能配电器、集中控制器、制动控制单元等。
健康管理系统负责收集整车工作状态及故障信息。实现整车健康管理、安全监视及数字仪表显控。组成部分包括数字仪表、集中控制器、数字仪表等。
根据油门状态对应输出功率,通过比例换算得到给定的目标功率。根据电机当前转速及转矩给定确定电机是否达到了给定功率。在没有达到给定功率时,驱动控制器按电机额定转矩给各电机控制器下发转矩指令。当达到给定功率时,以恒功率(给定功率)为限定条件,根据当前电机转速动态计算转矩给定值,转矩给定值随电机转速增大而反比减小。各电机采用以功率为控制给定的等转矩驱动策略,考虑整车动力性需求后期可根据轴荷不同进行转矩补偿。
整车功率流、信号流结构图如图1、图2所示。
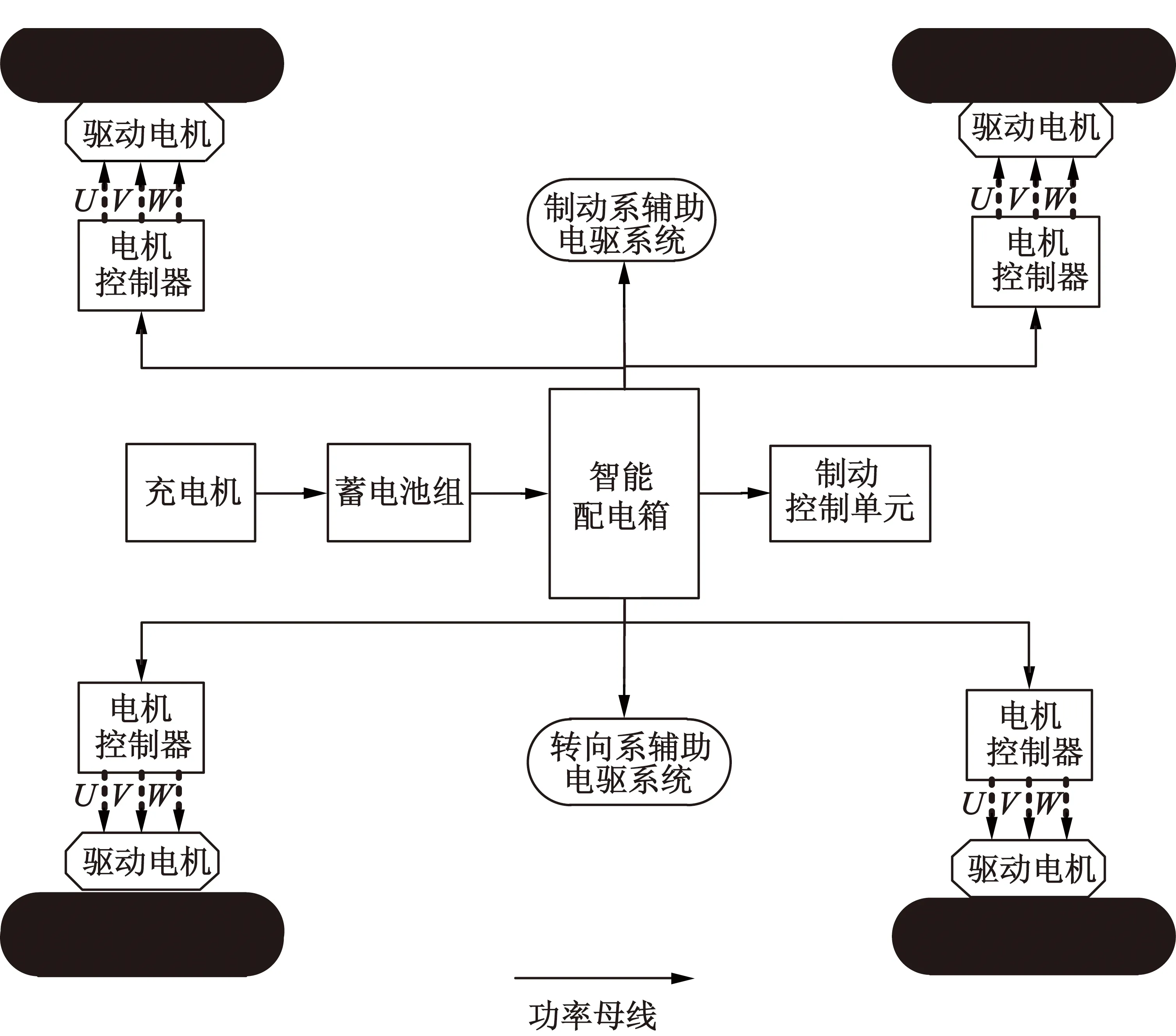
图1 整车功率流结构图
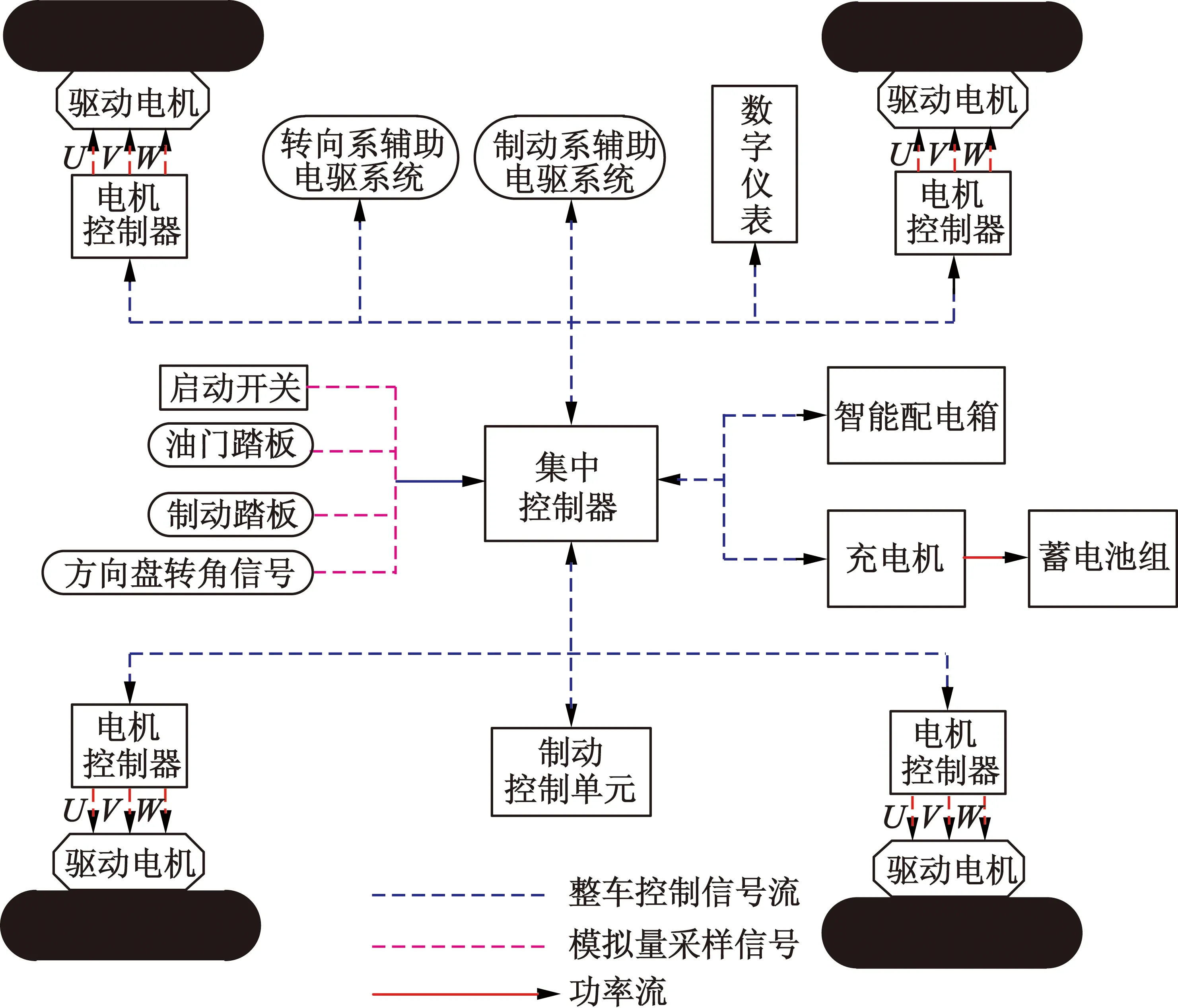
图2 整车信号流结构图
1.2软件方案
通过基于全轮独立驱动电动车极值轮速滑转率估算方法简化了全轮独立驱动滑转率的基础轮速难以选择的问题,通过基于胎压监测的轮速补偿技术解决了轮胎外径差异带来的计算量扰动问题,解决了全轮独立驱动电动车滑转率难以计算问题的方法。
若滑转率>0.2,说明驱动力过大,需要降低该轮的驱动力;若滑转率<-0.2,说明该轮被拖滑,需要增加该轮的驱动力。滑转率计算原理如图3所示。在车辆处于驱动状态时,比较四轮的转速并求出最小值,作为计算车速的基值;在车辆处于制动状态是,比较四轮的转速并求出最大值,作为计算车速的基值,从而有效地解决了滑转率计算时车速难以选择的问题。轮胎的胎压是轮速一个十分重要的参数,由于胎压的不同也会引起四轮转速存在差异,通过检测轮胎压力的方法对轮速进行修正补偿,对于更为准确估计轮胎转速具有重要作用,补偿原理如图4所示。
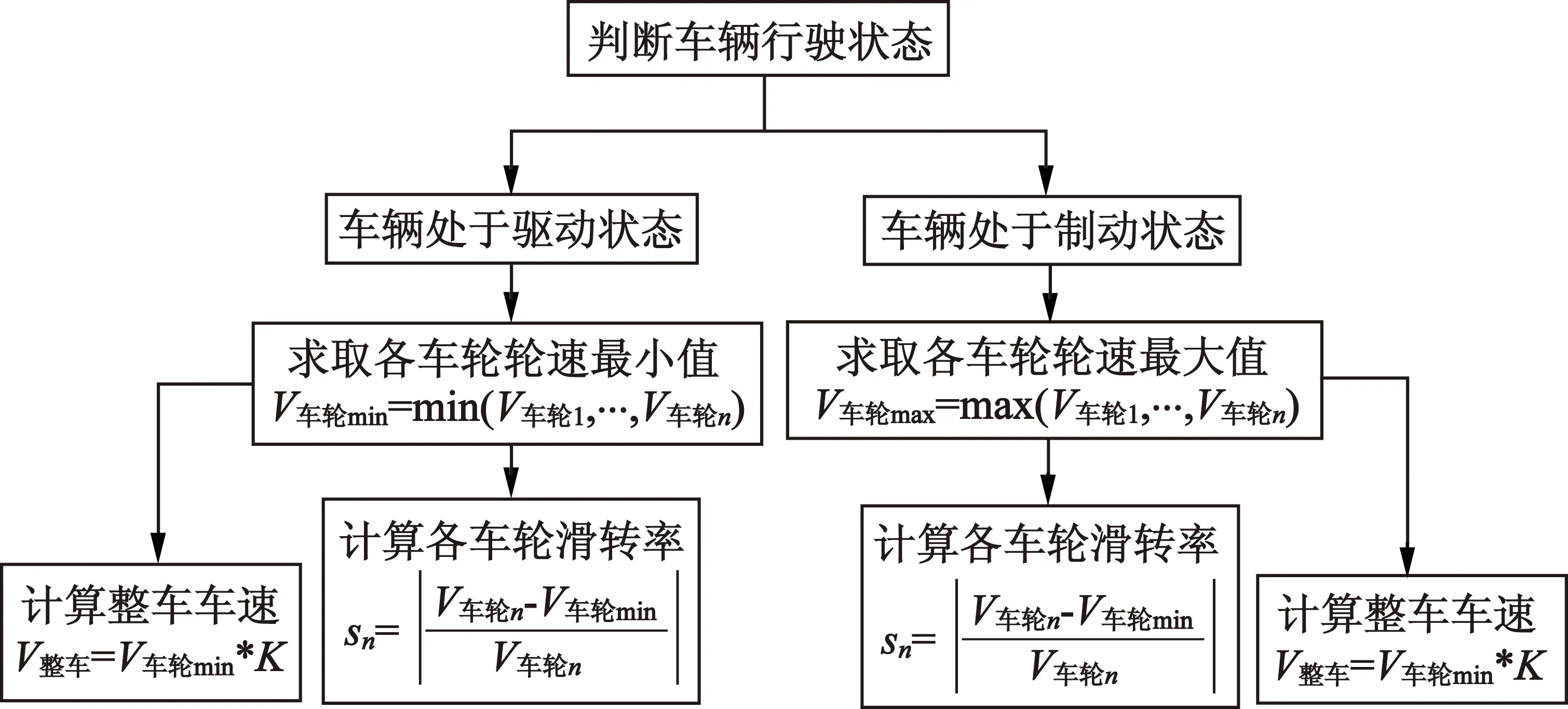
图3 车速及滑转率计算框图

图4 基于胎压的轮速修正计算框图
2 实验结果
四驱电动车的实物如图5所示。为了验证路面行驶各轮力矩分配策略的有效性,进行了路面左转弯、右转弯试验,实际的力矩分配效果如图6、图7所示。

图5 四驱电动车实物图
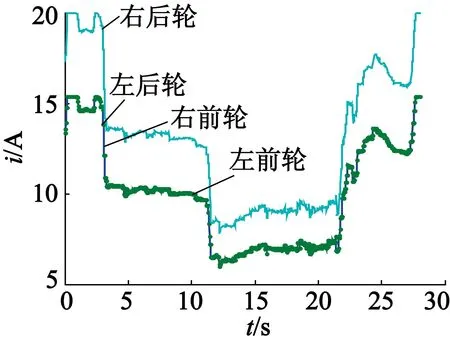
图6 左转弯(转向角15°)时各轮毂电机转矩分配
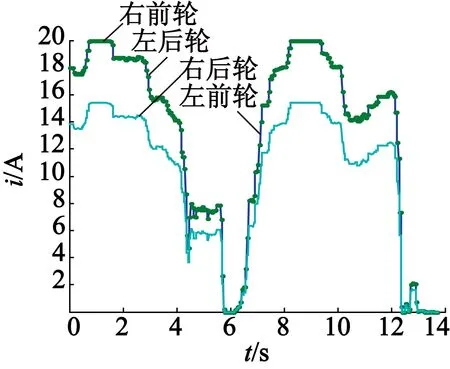
图7 右转弯(转向角15°)时各轮毂电机转矩分配
通过上述试验数据可以看出,在不同的转弯工况下,电子差速控制策略在试验台架上得到了验证,各轮毂电机转矩以转向角为基准,按对应比例关系分配到内侧和外侧轮毂电机,试验平台转向稳定,试验平台行驶平顺。
当车辆行驶到附着系数不良的路面(如积水地面、冰雪地面等),或当驾驶人进行复杂操作(如高速转向等)或因其他某种原因使四轮力矩分配不当时,可能产生车轮滑转的危险现象,因此要对车辆进行滑转率控制。滑转率控制的目标是将各轮滑转率控制在20%以内(从车辆动力学的角度考虑,当各轮滑转率达到20%时,是轮胎相对于地面附着力开始下降的临界点)。正常驱动行驶时,当滑转率超过0.2,说明驱动力过大,则降低该轮的驱动力;制动运行时,当滑转率超过0.2,说明该轮被拖滑,则增加该轮的驱动力。通过试验验证了各车轮发生滑转时的控制效果,图8、图9、图10分别给出了各轮空转时滑转率控制的效果。
从上述试验数据中可以看出,当各车轮出现滑转时,滑转率控制策略生效,通过控制各轮毂电机转矩,各车轮转速得到有效控制,各轮滑转率被控制在20%以内。
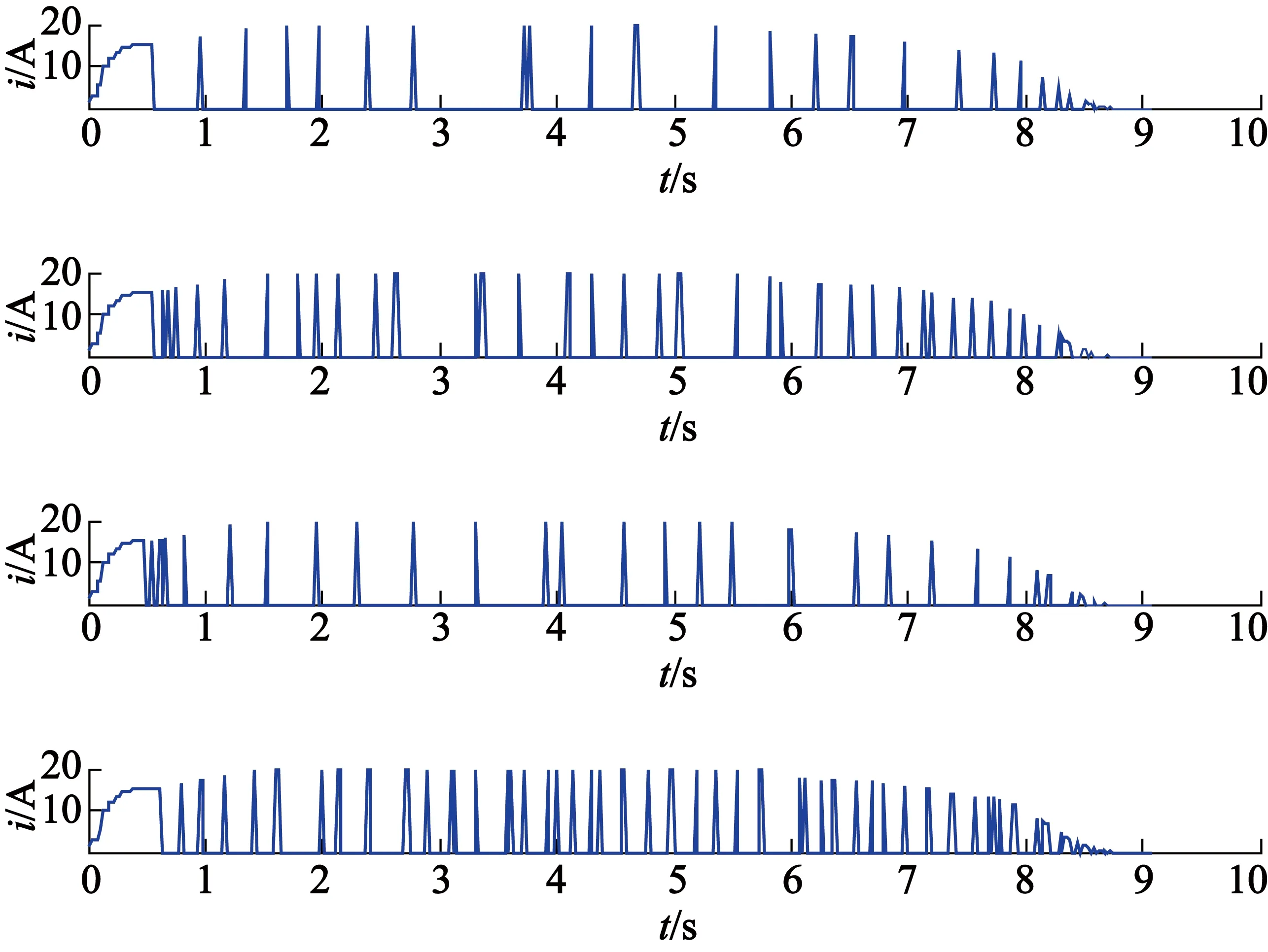
图8 各轮滑转时的转矩控制效果图
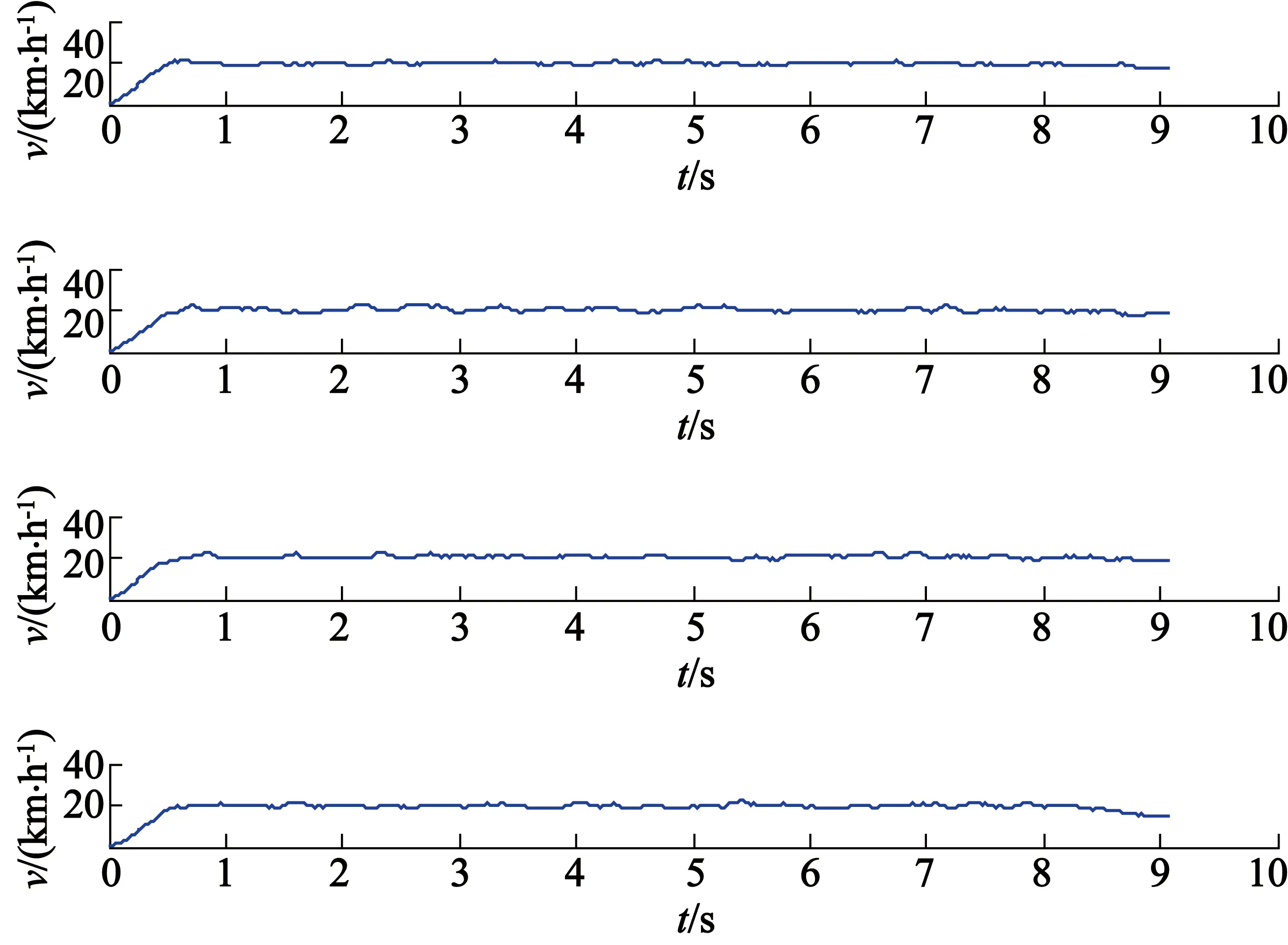
图9 各轮滑转时的轮速控制效果图
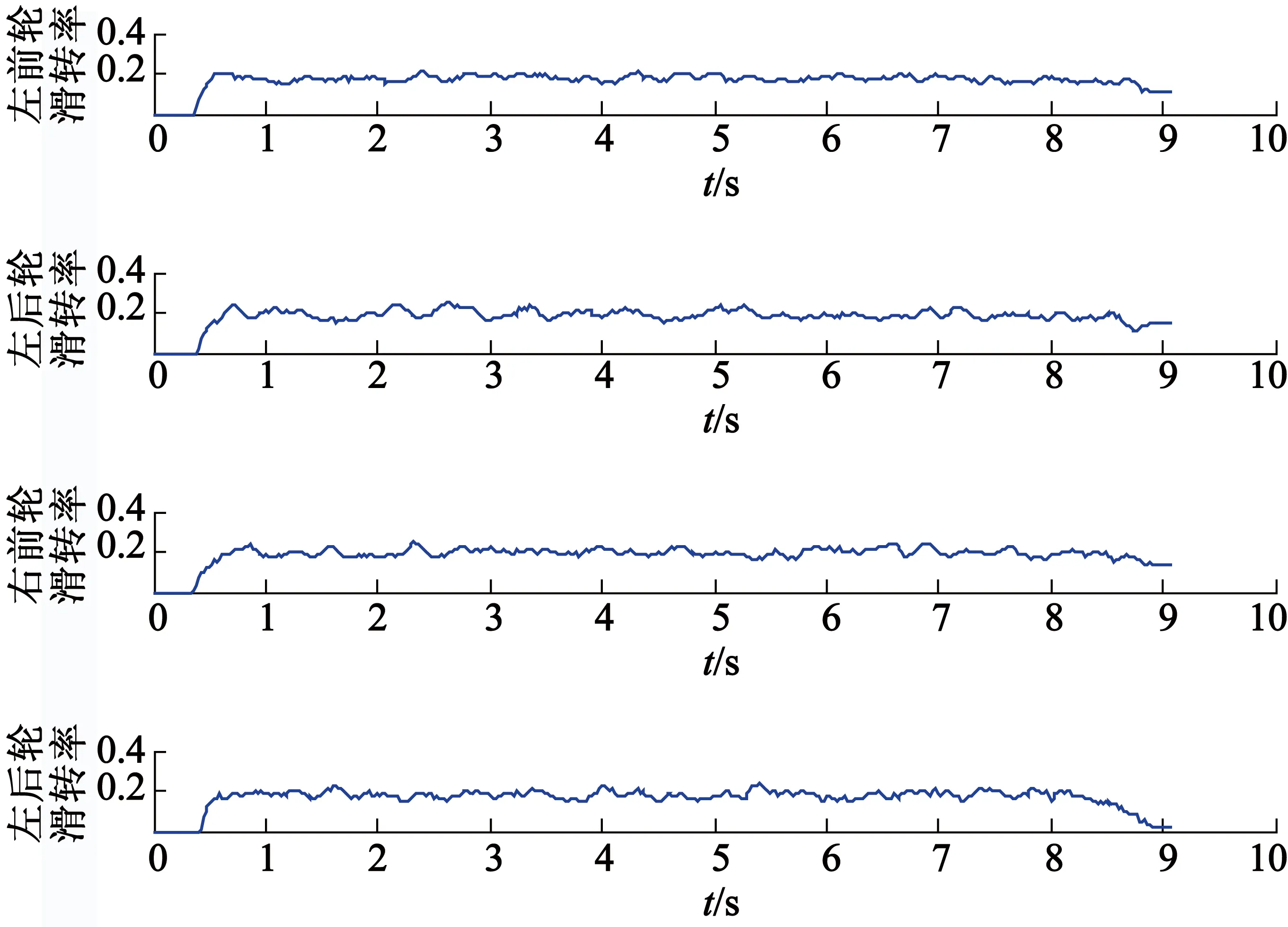
图10 各轮滑转时的滑转率控制效果图
3 结 语
本文研究了四轮驱动电动车转矩分配、车辆转速合理计算达到改善系统最佳运行经济性的问题。给出了车辆速度计算的方法以及优化措施,通过路面试验测试证明了该方法的有效性,对于车辆稳定性设计具有一定参考价值。
[1] 赵志刚,林辉,张庆超,等.电动舵机伺服控制器的设计与研究[J].微特电机,2013,41(9):44-46.
[2] 王恩德,黄声华.表贴式永磁同步电机伺服系统电流环设计[J].中国电机工程学报,2012,32(33):82-88.
[3] 李刚.线控四轮独立驱动轮毂电机电动汽车稳定性与节能控制研究[D].长春:吉林大学,2013.
[4] 廖凌宵.四轮独立驱动电动汽车控制策略的研究[D].武汉:武汉理工大学,2010:12.
[5] 周勇.四电动轮独立驱动电动车ABS/ASR控制策略研究[D].西安:西北工业大学,2006:14.
[6] GENG C,MOSTEFAI L,MOULOUD D,et al.Direct yaw-moment control of an in-wheel-motored electric vehicle based on body slip angle fuzzy observer[J].IEEE Transactions on Industry Applications,2009,56(5):1411-1419.
DesignandResearchoftheFour-WheelDriveElectricVehicle
ZHAOZhi-gang,LUOZhi-wei,HUXiao-long,HEGang,YANGSong-pu
(Beijing Institute of Space Launch Technology,Beijing 100076,China)
Wheel independent drive electric cars thanks to four-wheel motor as the drive motor, wheel speed and torque can be obtained by the motor feedback, enables independent control of individual wheels, the vehicle control strategy development, security and active control of braking energy feedback so has obvious advantages. Reasonable and calculating the drive torque and braking torque distribution control and the vehicle to achieve improved economic performance of the object; wheel speed estimated by the compensation policy, so that four-wheel independent drive electric cars slip rate calculation more accurately, to improve vehicle security has a very important value.
four-wheel drive electric vehicle; rotational speed estimation; slip rate control
2016-05-30
TM35
:A
:1004-7018(2016)11-0051-03
赵志刚(1989-),男,硕士,研究方向为电力电子与电力传动。