4WID-4WS-EV纵向驱动与横向稳定性联合控制
2016-08-26赵明慧王连东雷ZHAOMinghuiWANGLiandongMALei燕山大学秦皇岛066004
赵明慧,王连东,马 雷ZHAO Ming-hui, WANG Lian-dong, MA Lei(燕山大学,秦皇岛 066004)
4WID-4WS-EV纵向驱动与横向稳定性联合控制
赵明慧,王连东,马雷
ZHAO Ming-hui,WANG Lian-dong,MA Lei
(燕山大学,秦皇岛 066004)
针对研制的四轮独立驱动四轮转向电动样车,提出了纵横向联合控制策略。基于对整车及轮胎的动力学分析,提出纵向驱动力等状态控制策略,设计了最优控制器;对线控转向二自由度单轨汽车模型进行运动分析,以前轮转向车辆为基础,获取理想横摆角速度,设计了控制前后轮转角和横摆力矩的前馈控制器,并运用最优控制理论设计了反馈控制器,以提高系统响应速度和对摄动的鲁棒性;基于Adams和MATLAB软件环境建立了整车机械动力学模型及控制器模型,进行了纵横向联合仿真分析,并与传统两轮转向等力矩控制策略进行对比,结果表明,所提出的联合控制策略具有较好的控制效果。
四轮独立驱动;四轮转向;电动汽车;等状态;前馈;反馈
0 引言
当前各国都在开发高效节能环保的电动汽车[1]。四轮独立驱动四轮转向电动汽车(Four wheel independent driving and four wheel steering electric vehicle,简称4WID-4WS-EV)比传统汽车有较大优势:易实现电子底盘控制,可四轮转向,提高低速转向灵活性和高速行驶稳定性。
国内外学者对此研究较为深入,如四轮驱动方面,利用变分原理使轮胎与地面接触摩擦功最小,求解各电机转矩[2];通过优化分配四轮纵向力和侧向力,使四轮总附着裕度最大[3];根据各轮纵向力、横向力与垂直力的比值优化纵向力和横向力[4];基于最小二乘法计算前、后轮侧偏角和各轮驱动力[5],以上方法轮胎与地面间的侧向力和附着关系难以准确获取。
四轮转向方面,采用模型跟踪方式设计状态反馈控制器,但没有前馈控制,不利于提高响应速度和跟踪精度[6];对4WID-4WIS车辆提出主动前/后轮转向横摆力矩控制策略,根据质心侧偏角大小选择控制模式[7]。
本文以研制的四轮轮毂电机独立驱动四轮转向电动样车为对象,研究如何使各独立驱动系统协调运行,减少轮间相互拖拽作用,同时实现四轮转向,使系统具有较好的横向操纵稳定性。
1 4WID-4WS-EV动力学分析及控制策略
1.1整车及轮胎动力学分析
车辆稳定性问题出现在中高速转弯工况,此时后轮转角较小。假设后轮转角为0,各轮胎压及磨损状况相同,则左转弯的受力分析如图1所示。

图1 电动汽车转弯行驶整车受力分析
图中a、b分别为质心至前后轴距离,L为轴距,B为轮距;θ1、θ2为前两轮转角;β为质心侧偏角;v为汽车质心速度,vi(i=1,2,3,4依次代表前内、前外、后内和后外)为各轮心平动速度;αi为各轮侧偏角;O'为整车转向中心;RC、Ri分别为整车质心及各轮心转弯半径;ωr为车辆横摆角速度;Fxi、Fyi分别为地面作用于各轮纵向圆周力和横向侧偏力;FC为质心处离心力。
列写汽车纵横向合力及绕z轴旋转的合力矩方程,得到动力学方程组:

其中Fw为空气阻力。整车驱动力来自轮胎所受地面力,对轮胎进行受力分析,如图2所示。

图2 电动汽车驱动轮受力分析
图2中,or为车轮中心;r为车轮滚动半径;w为车轮转动角速度;Te为电机输出电磁转矩;F为车架通过电机轴作用于驱动轮的力;MR为地面作用于车轮的滚动阻力矩;Z为车轮承受载荷;GR为车轮(包括轮毂电机)自重;Fz为地面对车轮的支撑力,由此得力矩方程:

设电机电枢电流为Ia,则电机输出转矩为:

1.2电动汽车纵横向联合控制策略提出
针对4WID-4WS-EV提出了纵向驱动力与横向稳定性联合控制策略。纵向驱动力采用等状态控制模式;同时对电动汽车四轮转角与横摆力矩进行前馈控制,并对车辆质心侧偏角和横摆角速度进行反馈控制。
2 四轮独立驱动系统纵向驱动力控制
2.1等状态控制策略
各轮所受地面力包括纵向力及横向侧偏力,对纵向力作优化控制。将各轮所受纵向力Fxi与相应垂直载荷Fzi比值μi作为各轮实时状态,即:

提出纵向驱动力等状态控制策略:将各轮实时状态μi的平方与四轮μi平方和的平均值求差再平方,对四轮平方值进行加权求和;实时控制各轮驱动力,使此加权和最小,即对各轮实行等状态控制。其优化目标函数表达式为:
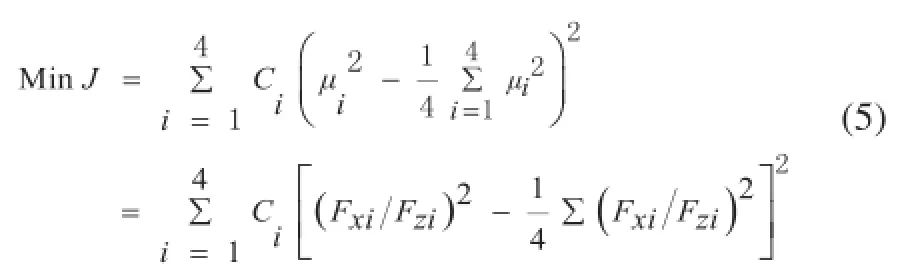
其中Ci为权重系数,经试验设定左转弯时各轮权重系数分别为C1=4,C2=1,C3=3,C4=2。
约束条件为:
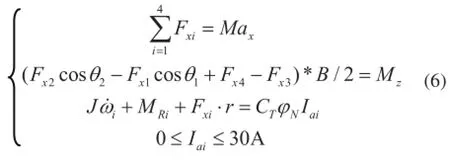
其中,M为整车质量;ax为汽车行驶方向加速度;Mz为整车横摆力矩。系统实时检测各轮角加速度前轮转角θ1、θ2及垂直动载荷Fzi,通过改变电机电流Iai进而改变 Fxi使目标函数最小,使各轮运行状态趋近相等,从而四轮滑动率趋向一致,减少各轮之间相互拖拽现象。
2.2最优控制器设计
等状态策略基于对四轮系统最优控制实现。对样车进行系统辨识,获得前内轮状态方程为:

将各驱动系统简化为线性系统,性能指标写为二次型函数。在一定约束条件下求使以下性能指标趋于最小。

其中,Q和R分别表示对状态变量和控制变量的加权矩阵,使性能指标最小的最优控制律:

K为最优反馈增益矩阵,P为对称正定阵,满足代数黎卡提方程:

最优反馈增益K决定于加权矩阵Q和R。设R=1,只调整Q阵,从Q中提取系数q,则:
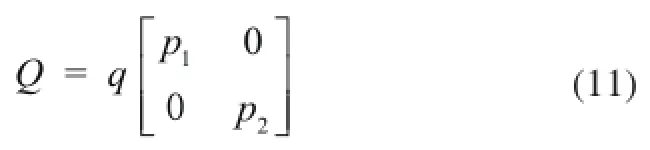
当q、p1和p2取不同值时,系统闭环极点在s平面上的变化轨迹表明系统具有不同的响应速度和收敛性。对四轮独立驱动电动汽车,要求系统响应具有快速性和平稳性,利用控制工具箱进行仿真试验,确定q=1,p1=2.82,p2=1。
经反复仿真对比,最优反馈增益矩阵K=[k1k2]=[1.4 0.9]时,系统动态性能和稳态性能最佳,系统收敛曲线如图3所示,图中粗、细实线分别代表系统状态ΔI和的变化。由图可知,ΔI逐渐平顺收敛,超调不大,基本没有振荡,说明电机运行较平稳。
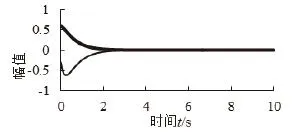
图3 k1=1.4,k2=0.9时系统收敛曲线
车辆同轴两轮特性基本相同,设其控制器参数相同,各轮控制器参数如表1所示。

表1 四轮驱动系统加权值及控制器参数
3 4WID-4WS-EV横向稳定性控制
3.1前馈控制器设计
3.1.1线性二自由度单轨两轮模型建立
对转弯行驶车辆进行简化:质心位于地面,忽略转向系和悬架系,汽车侧向加速度小于0.4g。因此车辆可视为六自由度刚体,简化为线性二自由度单轨两轮模型,如图4所示。
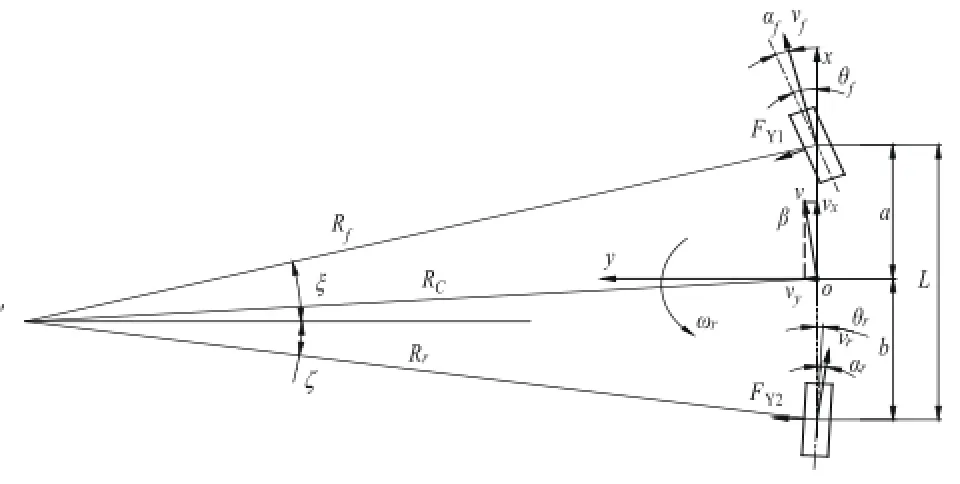
图4 线性二自由度两轮汽车单轨模型
图中,FY1、FY2分别为地面作用于前后轮的侧偏力;θf、θr为前后轮转角;vx和vy为汽车质心速度v沿x 和y轴的分量;vf和vr为前后轮心平动速度;αf和αr为前后轮侧偏角;Kf和Kr为前后轮侧偏刚度;β为质心侧偏角。
汽车以一定转角和纵向速度作平面运动,当前后轮转角不大时,其二自由度运动微分方程为:

其中,IZ为汽车绕oz轴的转动惯量。
将上式转化为状态方程:

式中:

3.1.2车辆理想横摆角速度获取
以两轮转向二自由度单轨模型为基础,求车辆理想横摆角速度,作为前馈控制约束条件及反馈控制理想状态。转角低频输入车辆稳态响应情况下,横摆角速度与转角化为一阶滞后环节[8]:

3.1.3前馈控制器设计

式中:

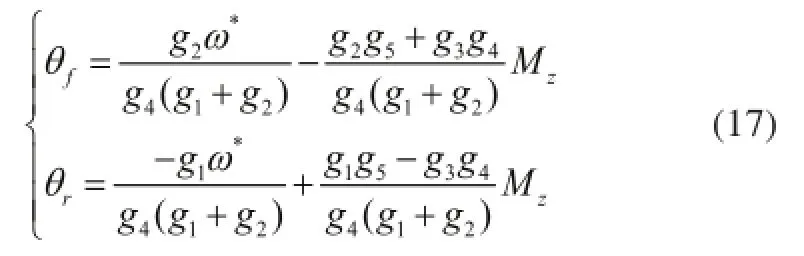
式(17)为前馈控制器,作为前后轮转角参考输入。由几何关系将两轮车辆还原为四轮车辆,参考转角与实际转角求差得四轮转角调节量。由式(14)和式(16)可知同向(符号相同),且g4>0,满足四轮转向在实际应用中|δf|>|δr|。
3.2反馈控制器设计
车辆运行中,实际状态常与理想状态存在输出误差。将状态跟踪误差定义为,其中。由最优控制理论,定义以下性能指标趋于最小。

其中,q1、q2为车辆状态权重系数,r1为控制横摆力矩输出权重系数。综合考虑系统收敛的平稳性和快速性,及控制输入的物理限制,经反复计算,确定q1=4、q2=1,r1=1。

图5 当vx=10m/s,k1=1,k2=0.75时系统收敛曲线
4 纵横向联合控制仿真试验
应用Adams和MATLAB建立整车及控制模型如图6所示。系统控制对象为四个车轮,被控量为电机电流及四轮转角,控制量为输入电压。
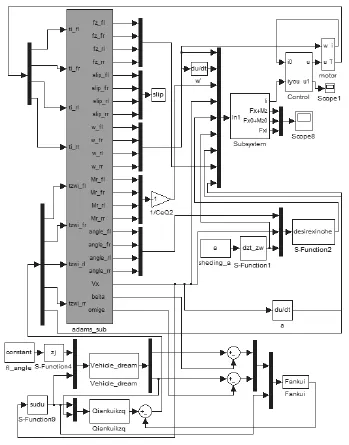
图6 整车纵横向联合控制仿真模型
图中Subsystem为控制策略模型;adams_sub为整车机械模型;Motor为电机及驱动器模型;Control为系统最优控制模型;Vehicle_dream为理想二自由度车辆模型;QiankuiCzq和fankui分别为前馈和反馈控制器。以样车质量、速度、轮胎侧偏刚度及其转动惯量为摄动项,设速度浮动±5km/h,其他摄动项浮动±15%。仿真第1s车辆以10m/s匀速直线行驶,之后10s均匀转过3°,11s后以此转角稳态转弯行驶。
采用等力矩与等状态策略,结合前馈反馈控制四轮转向与传统两轮转向,实施正交试验。
图7为不同策略转弯各轮电流曲线。由图可知,等力矩策略四轮电流均相等;等状态策略随转角增大,内侧轮电流逐渐减小,外侧逐渐增大,稳态时各电流趋于稳定。说明等状态策略更注重按各轮状态需要分配电流。
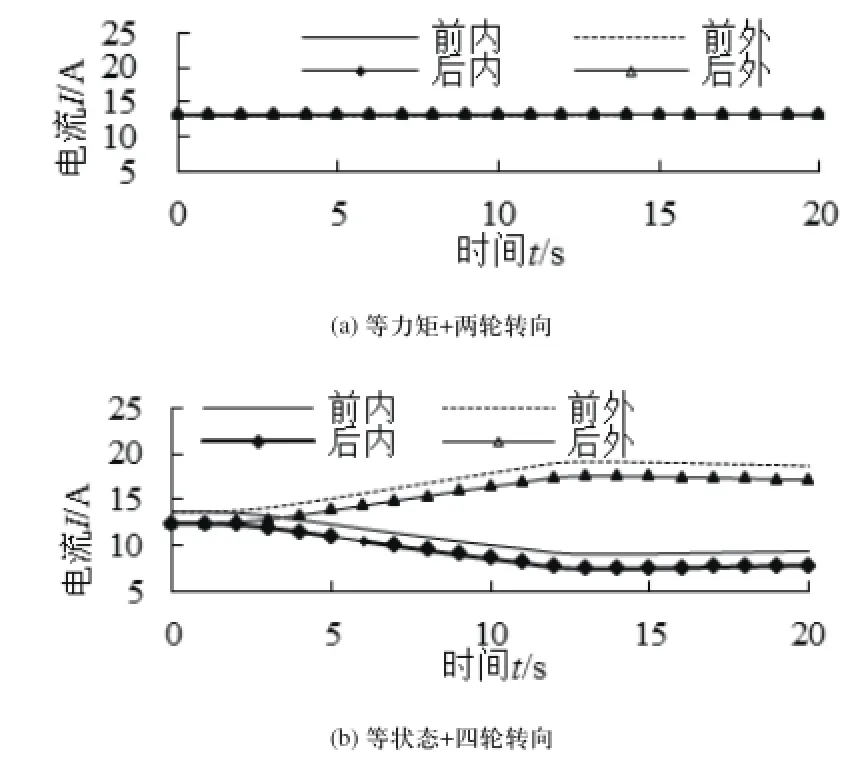
图7 不同控制策略转弯各轮电流
图8为各轮及整车速度曲线。不同策略各轮与整车速度变化趋势相近。等状态策略四轮转向,内外轮速变化范围较大,符合实际行驶情况。
图9为不同控制策略转弯各轮滑动率曲线。由稳态值,等力矩策略内侧轮滑转,外侧轮滑移;等状态策略前轮滑转,后轮滑移。由最大值,等力矩策略最大滑转率为后内轮1.80%,最大滑移率为前外轮-1.62%;等状态策略最大滑转率为前内轮1.52%;最大滑移率为后内轮-1.18%,其绝对值比等力矩策略有所减小。

图8 不同策略转弯各轮及整车速度

图9 不同策略转弯各轮滑动率
图10为整车质心侧偏角对比曲线。由图可知,转弯时,质心侧偏角逐渐增大,但其值接近于0。等力矩和等状态策略质心侧偏角最大值分别为0.81°和0.70°,证明前馈反馈控制器在较高速度转弯时能够更好地控制车辆横向稳定性。

图10 不同策略转弯时整车质心侧偏角
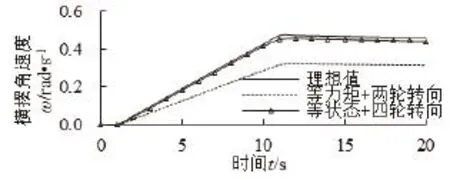
图11 不同策略转弯时整车横摆角速度
图11为整车横摆角速度对比曲线。等力矩两轮转向策略横摆角速度与理想值相差较多;等状态四轮转向策略,横摆角速度较好地跟踪理想值,说明所设计控制器具有较好的跟踪速度和精度,对系统摄动有较好的鲁棒性。
综上,采用等状态策略控制电动汽车纵向驱动力,结合前馈加反馈进行横向稳定性联合控制,减弱了四轮之间相互拖拽作用,降低了轮间功率内耗;同时系统稳定性得到很好控制,提高了系统响应速度和对系统摄动的鲁棒性。
5 结论
1)对研制的4WID-4WS-EV整车及轮胎进行动力学分析,提出驱动力等状态控制策略,设计了最优控制器;
2)对线性二自由度单轨两轮汽车模型进行运动分析,以前轮转向车辆为基础,获取理想横摆角速度,设计了前馈控制器,并运用最优控制理论设计了反馈控制器;
3)建立了整车及控制模型,联合仿真结果表明,所提出控制策略有较好的控制效果。
[1] 周勇,李声晋,田海波.四轮独立驱动电动车的ABS控制方法[J].汽车工程,2007,(29)12: 1046-1050.
[2] Junya Yamakawa,Keiji Watanabe.A method of optimal wheel torque determination for independent wheel drive vehicles[J]. Journal of Terramechanics,2006,(43):269-285.
[3] Ali Roshanbin,Mahyar Naraghi. Vehicle Integrated Control-An Adaptive Optimal Approach to Distribution of Tire Forces[A].2008 IEEE International Conference on Networking[C].2008: 885-890.
[4] Ossama Mokhiamar,Masato Abe. Active wheel steering and yaw moment control combination to maximize stability as well as vehicle responsiveness during quick lane change for active vehicle handling safety[J].Proceedings of the Institute of Mechanical Engineering Part D:Journal of Automobile Engineering,2002,216: 115-123.
[5] Sumiya Hayato,Fujimoto Hiroshi. Electric vehicle range extension control system based on front- and rear-wheel sideslip angle and left- and right-motor torque distribution[J].IEEJ Transactions on Industry Applications,2012,132(3):308-314.
[6] 郑凯锋,陈思忠,王亚.基于线控技术的四轮转向全滑模控制[J].东南大学学报(自然科学版),2013,43(2):334-339.
[7] 杨福广,阮久宏,李贻斌.4 W I D-4 W I S车辆横摆运动AFS+ARS+DYC模糊控制[J].农业机械学报,2011,42(10):6-12.
[8] 来飞,黄超群.汽车四轮转向变增益跟踪控制的研究[J].汽车工程,2012,34(6):517-522.
4WID-4WS-EV longitudinal driving force and lateral stability joint control
U469.722
A
1009-0134(2016)06-0121-06
2016-04-18
燕山大学博士基金项目(B940)
赵明慧(1979 -),女,黑龙江人,讲师,博士,研究方向为电动汽车控制。
