激光测距绝对认址技术在巷道堆垛机中的应用
2016-08-26薛广库乔永忠夏远猛志XUEGuangkuQUJieQIAOYongzhongXIAYuanmengCHENGZhi成都飞机工业集团有限责任公司数控加工厂四川成都610091
薛广库,曲 杰,乔永忠,夏远猛,程 志XUE Guang-ku, QU Jie, QIAO Yong-zhong, XIA Yuan-meng, CHENG Zhi(成都飞机工业(集团)有限责任公司数控加工厂 四川,成都 610091)
检测与监控
激光测距绝对认址技术在巷道堆垛机中的应用
薛广库,曲杰,乔永忠,夏远猛,程志
XUE Guang-ku,QU Jie,QIAO Yong-zhong,XIA Yuan-meng,CHENG Zhi
(成都飞机工业(集团)有限责任公司数控加工厂 四川,成都 610091)
激光测距技术在巷道堆垛机计数、定位领域的应用,实现了巷道堆垛机运行过程的绝对认址,提高了设备计数、定位的准确性。以某单位巷道堆垛机计数、定位过程使用激光测距技术为例,讲述激光测距绝对认址技术对现代自动仓储技术发展所带来的深远影响,为同行们提供技术借鉴。
激光测距;绝对认址;巷道堆垛机
0 引言
随着科技和当代物流业的快速发展,传统物流技术已无法满足现代物流业对仓储物流精细、准确、高效化的技术要求。巷道堆垛机作为现代仓储物流环节中重要的执行机构,其日常运行过程中计数、准停定位准确性的高低直接影响着整个仓储物流的效率。激光测距绝对认址技术的出现和应用使上述问题得到了很好的解决。
1 巷道堆垛机认址技术简介
自动化立体仓库巷道堆垛机常见认址方式如表1所示。
当采用光电开关与认址片组成的位置检测装置时,所使用的光电开关若固定在巷道堆垛机上随设备一起运动,认址片固定不动,此种位置检测、认址方式称为相对认址方式;反之为绝对认址方式。水平和起升方向上的检测光电开关一般各有三组,即:起升方向上的上对准光电检测开关、纵向计数光电开关、下对对准光电检测开关;水平方向上的前对准光电检测开关、横向认址光电开关、后对准光电检测开关。当设备计数、定位时,两组光电检测装置上每组三个光电检测开关需同时接收到感应信号,才能准确计数、定位。

表1 巷道堆垛机认址检测方式及特点
目前,绝对认址常见的检测方式有编码器检测、激光测距和条码仪检测三种。其中,编码器检测方式检测过程中定位精度最差,故障率最高;条码仪检测方式检测过程中条码仪附近需有充足的光照。另外,因定位检测过程为条码仪扫描货架各货位上的位置条码,因此要定期对位置条码的完好性进行检查,并保证位置条码表面干净无灰尘。激光测距是当前自动化立体仓库巷道堆垛机位置检测、定位技术中应用最为广泛的绝对认址方式。其结构简单、环境适应能力强,检测定位精度高。具体检测方式如图1所示。
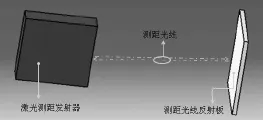
图1 激光测距认址方式检测原理图
如图1所示,激光测距认址检测方式由激光测距发射器和测距光线反射板两部分组成。一般水平方向(横向)的测距发射器安装在巷道堆垛机上,测距光线反射板固定在地面上;起升方向(纵向)的测距发射器安装在巷道堆垛机的上横梁上,测距光线反射板安装在堆垛机载货台上,随载货台一起运动,如图2所示。
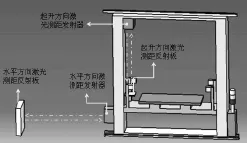
图2 激光测距检测单元安装位置布局图
2 控制系统网络结构
采用激光测距位置检测认址方式的自动立体仓库巷道堆垛机控制系统的数据通讯[1]一般是通过Profibus-DP总线将可编程控制器、激光测距仪、水平电机变频器、升降电机变频器、货叉电机变频器、堆垛机触摸屏、现场操作平台、上位机控制台等连接到同一个Profibus-DP网络中,并给连接在DP网络上的每个模块分配不同的总线地址。设备运行时,PLC通过访问不同的DP总线地址实现PLC可编程控制器与激光测距器、触摸屏及各驱动变频器之间的数据通讯。最后,通过红外通讯,实现PLC与上位机控制台之间的数据通讯。整个控制系统通讯框架如图3所示。
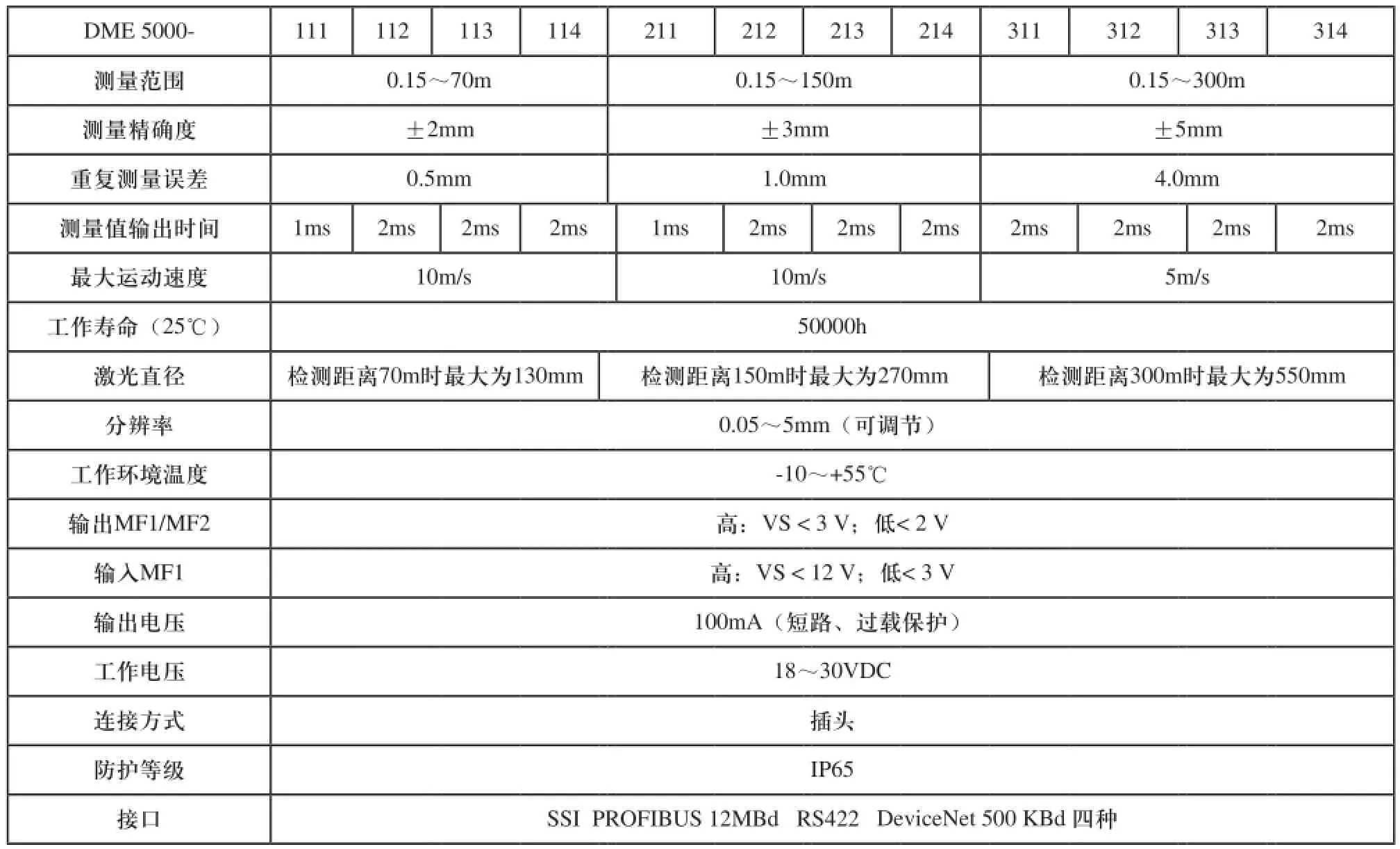
表2 Sick—DME5000系列激光测距传感器主要参数

图3 控制系统数据通讯框架
3 激光测距仪的选择及应用
自动化立体仓库巷道堆垛机绝对认址检测用激光测距仪的选择主要依据以下九点:1)所检测的距离长度范围;2)设备定位精度要求;3)检测误差范围;4)设备最高运行速度;5)设备工作场所的环境及温度范围;6)设备供电系统所能提供的电压、电流;7)设备控制系统提供的通讯接口方式;8)设备的设计寿命;9)检测信号输入/输出方式等。以SICK-DME5000系列激光测距仪为例说明[2],具体参数如表2所示。
3.1激光测距仪与PLC之间通讯连接的实现
SICK-DME5000系列激光测距仪与PLC最常用的通讯连接方式有以下三种:
1)通过Profibus总线进行连接。
2)通过SSI同步串行输出接口与带有SSI输入模块的PLC连接。
3)通过RS422接口与带有RS422通讯模块的PLC连接。
三种连接方式的电气接线图分别如图4、图5所示。
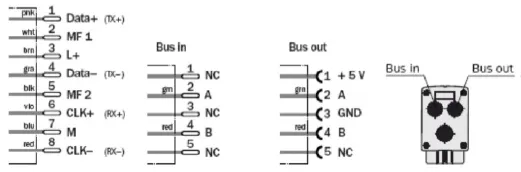
图4 Profibus总线连接


图5 SSI/RS422接口连接
另外,激光测距仪与PLC实现通讯连接前(以西门子S7-300PLC为例),在进行PLC控制系统硬件组态时,应先进行激光测距仪对应GSD文件的加载[3]后,才能进行正常的硬件组态及相关通讯参数的设置。控制系统在进行硬件组态的过程中,各模块订货号必须与实际所选硬件模块色订货号完全一致,确保设备与PLC及上位机之间正常的数据传输。
3.2绝对认址定位及合理调速的实现
在设备运行过程中,激光测距仪通过Profibus-DP总线读取PLC数据块中货架货盘水平、起升方向上的目标位置数据,再通过激光测距仪发出的经反射板反射回来的测距激光束来确定巷道堆垛机当前运行的绝对坐标位置。当巷道堆垛机接收到上位机或操作面板触摸屏下达的作业指令时,PLC通过Profibus-DP总线与激光测距仪进行通讯,激光测距仪通过测距激光束进行距离测量,PLC控制程序对巷道堆垛机当前位置与目标位置之间的距离进行计算,得出巷道堆垛机水平、起升方向距离目标位置的相对距离。激光测距仪将堆垛机的实时运动位置反馈给PLC,PLC控制控制电机变频器对水平、起升方向运动电机进行合理的加减速控制。设备运行过程中,运行电机末端的旋转编码器会实时将其检测的电机转速通过脉冲信号反馈给PLC和变频器,并与激光测距仪的实时测量数据进行对比,形成一条对激光测距检测系统闭环位置检测反馈回路。巷道堆垛机运行坐标系图如图6所示。
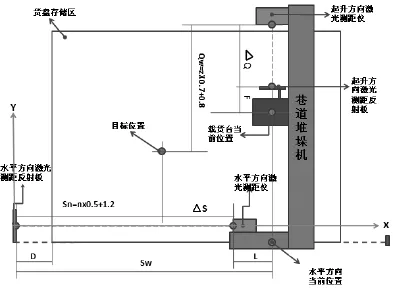
图6 堆垛机运行坐标系
以图6的自动化立体仓库巷道堆垛机为例,Sn为自动化立体仓库中第n列货架距离水平方向激光测距反射板的距离;0.5m为两货盘中心距;D=1.2m为距离水平方向激光测距发射板最近货架立柱与其间距;Sw为堆垛机当前水平方向绝对位置;△S水平方向激光测距仪距目标位置的间距;L为水平方向激光测距仪与堆垛机载货台中心间距;Qn为货架中第z层距离起升方向激光测距仪的距离间距;0.7m为货架上两相邻货层间货位低位间距;F=0.8m为起升方向激光测距反射板距离载货台中心的距离;△Q为起升方向激光测距仪到反射板的间距;Qw为起升方向激光测距仪距目标位置的间距。
在巷道堆垛机运行过程中,需将当前检测到的测距脉冲信号发送给控制系统PLC,系统经过计算得出当前堆垛机载货台中心位置距离目标位置坐标(Xn、Yn),实现巷道堆垛机运行过程的绝对认址定位。Xn、Yn的计算公式如下所示:

控制系统PLC将当前检测到的巷道堆垛机载货台中心点到目标位置的距离与控制系统设置的水平、起升方向变频调速距离进行比对,调取合理的运行电机变频控制曲线[4],如图7所示对水平、起升方向电机进行控制,实现设备运行过程中的安全、合理、调速及准确定位。
如上图所示,当巷道堆垛机载货台当前中心位置距离目标位置间距D≥D2时,控制系统调用上图中T1进行运行电机变频调速;当D2>D≥D3时,控制系统调用T2进行运行电机变频调速;当D<D3时,控制系统调用T3进行运行电机变频调速。
另外,为避免因变频调速过程中急速加减速控制造成的运行电机抱闸现象的出现,进一步提高运行电机运行、制动过程的综合性能和激光测距认址定位的准确性,控制系统运行电机端头增加了旋转编码器检测装置,形成了双重闭环位置检测反馈系统,如图8所示。
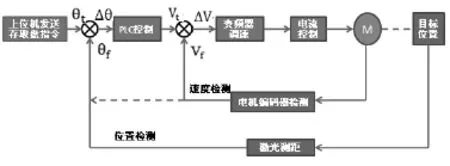
图8 堆垛机运行闭环检测反馈系统
4 结束语

图7 运行电机变频调速控制曲线
通过激光测距绝对认址定位技术在巷道堆垛机中的应用,极大程度的简化了巷道堆垛机的计数、测距机构,有效的提高了堆垛机运行过程中的计数、定位的精确度。长期的现场应用表明,采用该种方式进行巷道堆
【】【】垛机的认址、定位,使得自动化仓储系统运行可靠、定位精度高、设备故障率低、方便维修等方面的特点凸显。
[1] 向晓汉.西门子PLC高级应用实例精解[M].北京:机械工业出版社,2010,7.
[2] Sick DME5000激光测距仪应用手册[Z].
[3] 廖常初.西门子S7-300/400应用技术[M].北京:机械工业出版社,2008,5.
[4] 葛芸萍.电机调速应用技术及实训[M].北京:化学工业出版社2010,9.
Application of laser ranging absolute addressing technology on staker machines
TP273
B
1009-0134(2016)06-0028-04
2016-03-07
国家科技重大专项项目:国产高档数控机床与数控系统在飞机筋肋梁等加工单元的应用(2013ZX04001-021)
薛广库(1988 -),男,陕西兴平人,本科,主要从事自动化立体仓储技术应用及日常维护工作。
