基于SURF特征与积分通道特征的车型识别
2016-08-22凌永国胡维平
凌永国,胡维平
(1. 广西民族师范学院 物理与电子工程系,广西 崇左 532200;2. 广西师范大学 电子工程学院 广西多源信息挖掘与安全重点实验室,广西 桂林 541004)
基于SURF特征与积分通道特征的车型识别
凌永国1,胡维平2
(1. 广西民族师范学院 物理与电子工程系,广西 崇左 532200;2. 广西师范大学 电子工程学院 广西多源信息挖掘与安全重点实验室,广西 桂林 541004)
随着交通问题的日益严峻,智能交通系统技术的研发显得尤为迫切。车型识别系统作为ITS系统的一个重要组成部分,起着关键的作用。针对车辆图像的车型识别,提出了一种基于SURF(speeduprobustfeatures)特征与积分通道特征的车型识别方法。实验结果表明,此方法能够对车辆图像的车型进行准确的识别,且简单高效,具有较高的鲁棒性。
车型识别;车辆特征;SURF特征;积分通道特征;SVM支持向量机
图像特征是一幅图像区别于其他图像的基本属性,图像分类的结果取决于图像特征的有效性。为了提高车型识别系统的速度及识别率,必须提取良好的车辆特征,因此特征提取的算法研究显得尤为重要。
目标图像主要包含形状、颜色、纹理等特征。图像特征提取的算法有很多种,较为常用的主要有基于形状的提取算法[1]、基于纹理特征提取算法[2]、基于伪Zernike矩特征提取算法[3-4]、基于HOG特征提取算法[5]、基于积分通道特征提取算法[6]、基于SURF特征提取算法[7]等。本文主要分析了SURF特征量以及目前应较常用于人体检测的积分通道特征特征,综合比较两种特征的性能,提出将SURF特征与积分通道特征相结合的特征量作为车型分类的车辆特征。
1 SURF特征
SURF特征由BAY等人[8]在2008年提出。该算法的思想是通过积分图像及采用快速Hessian矩阵检测SURF的特征点,极大地缩减了SURF算法的计算时间。且SURF特征具有尺度不变性、旋转不变性及光照不变性,并且计算效率高,鲁棒性较好,因此可用于图像的分类识别中。SURF算法主要包括特征点检测和特征点描述两个步骤。
1.1SURF特征点检测
为了确保SURF特征点具备尺度不变性,SURF算法建立图像的尺度空间。对于二维图像I(x,y),可通过与高斯核函数进行卷积来获得不同尺度空间
L(x,y,σ)=I(x,y)*G(x,y,σ)
(1)
式中:G(x,y,σ)为尺度可改变的高斯函数。
SURF算法采用Hessian矩阵检测特征点,检测出的特征点实际上是Hessian矩阵局部极值点的位置。对于图像I中某一像素X=(x,y),则在尺度σ下的Hessian矩阵H(X,σ)如下
(2)
式中:Lxx(X,σ),Lyy(X,σ),Lxy(X,σ)分别为图像I与高斯函数在x,y,xy方向上的二阶偏导数在点X处的卷积。
图像中任意框状卷积滤波可通过积分图像非常方便的计算,Bay等人提出采用框状卷积滤波去近似模拟高斯二阶偏导滤波,这样可降低高斯二阶偏导计算的复杂度,提高算法的运算效率,模拟过程如图1所示。

图1 方框滤波近似高斯二阶偏导
设Dxx,Dxy,Dyy分别为Lxx,Lxy,Lyy的近似,则Hessian行列式的近似表达式为
det(Happrox)=DxxDyy-(ωDyy)2
(3)
式中:ω是调节参数,用来补偿近似过程中造成的误差,一般可取0.9。
如图2的3维(x,y,S)尺度空间中,在3×3×3邻域内采用Hessian矩阵求极值。统计某点3×3×3邻域内包括自己的27个响应值,如果这个点的响应值在其26个邻域响应值中为最大,则选取该点为候选特征点。得到候选特征点后,为了加强特征点抗噪能力,需舍弃对比度较低的极值点和不稳定的边缘极值点,从而得到较稳定的特征点位置。
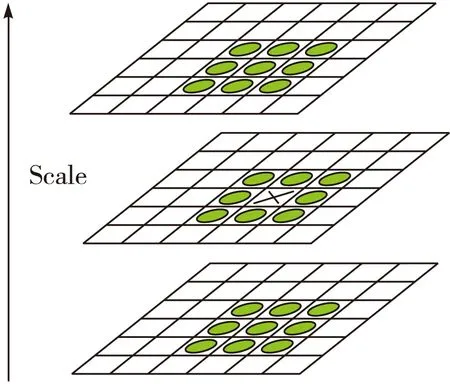
图2 特征点3×3×3邻域图
1.2SURF特征点描述
SURF特征点的描述主要分为主方向的确定和特征向量的计算两个过程。
1.2.1主方向的确定
为了确保提取的SURF特征具有旋转不变性,在描述特征点时,要对每个特征点都赋予一个可匹配的方向特征。
SURF特征点的主方向是通过计算特征点邻域内的Harr小波特征来确定。以特征点为中心,半径为6σ的圆内(σ为该特征点所在的尺度),分别计算所有点x和y方向上,尺寸为4σ的小波特征。Harr小波原理图如图3所示。统计60°扇形区域的小波相应之和得到该区域内的矢量,并以60°为单位在园内滑动扇形区域,遍历整个圆后取最大的矢量作为该点的主方向,该过程如图4所示。
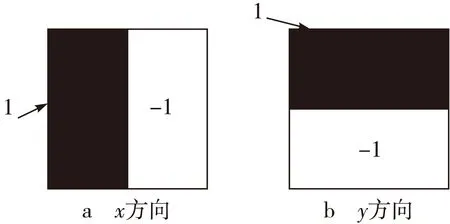
图3 Harr小波原理图
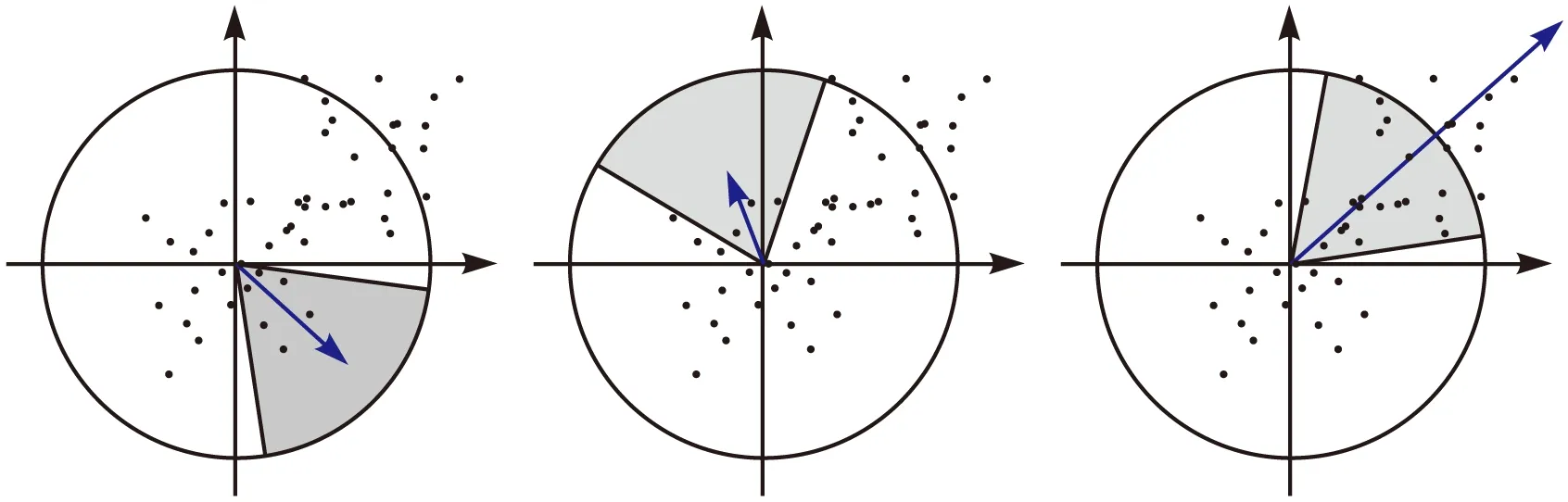
图4 确定特征点主方向
1.2.2特征描述向量
特征点的主方向确定之后,就要对特征点进行描述。在该特征点的方向上构建一个以特征点为中心,边长为20σ的矩形区域,并将矩形区域划分为4×4个子区域,分别计算这16个子区域的Harr小波响应。记dx为该点主方向的水平Harr小波响应,dy为垂直方向Harr小波响应,并分别计算每个子区域dx,dy之和及其绝对值之和构成向量V。特征描述子的构造如图5所示,特征向量V可表示为

(4)
因为每个子区域的特征向量为4维,一共有16个子区域,因此每一个特征点的描述向量为64维。为使特征对光照变化就有一定不变性,需对64维的特征向量进行归一化。
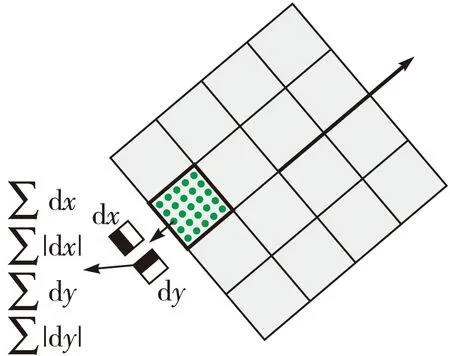
图5 SURF特征描述子构造
1.3车辆SURF特征点提取
将检测提取的车辆图像归一化后,即可进行车辆特征的提取。因为每一张车辆图像提取到的特征点数一般都不相同,所以由特征点组成的车辆图像特征维数也不相同。而提取的特征用于分类识别,要求提取车辆图像特征的维数相同。本文从4种车辆图像特征点分布情况出发,通过分块求平均的方法构造特征矢量,该方法的一般过程如图6所示。

图6 SURF分块平均法构造特征矢量
本文将车辆图像分成8×1块子图像,计算得到每个子区域的64维平均特征向量后,从上到下将每个子区域的平均特征向量连接成车辆的特征向量,即得到512维(8×64)特征向量。
2 积分通道特征
2.1通道的概念及属性
积分通道特征是PiotrDollar等于2009年提出的一种目标图像快速特征的表达方法。积分通道特征的基本思路是:通过对输入的图像做线性或非线性变换获得通道,利用积分图来快速计算通道特征。给定输入图像I,图像经过线性或非线性变换的通道计算函数为Ω,则输出响应C即为通道,即C=Ω(I)。为了可以采用滑动窗口进行快速计算,要求这些通道具有变换不变性,即C=Ω(I)和C′=Ω(I′)成立。而为了利用积分图像快速计算通道特征,要求通道具有局部可求和性,即单通道图像上某一个矩形区域内的像素之和f(C)应满足
(5)
2.2通道类型
通道是提取积分通道特征过程的第一步,常用的图像通道类型主要包括如下:
1)灰度和颜色变换
灰度变换是图像领域中最简单的变换之一。另外,颜色图像空间通常也会用到,Luv颜色空间对图像颜色变换具有较好的鲁棒性,因此Luv颜色空间常用于图像处理中的彩色处理领域。
2)线性滤波和非线性滤波
利用线性变换获取通道是一种较为简单有效的方法,通过使用不同的滤波器可以获得图像不同的信息,如DoG(DifferenceofGaussian)和滤波器Gabor滤波器。具有上述通道属性的非线性变换有很多种,其中Canny等一些边缘检测算子可以捕获边缘强度信息。
3)积分直方图
Porikli等人提出利用积分图来快速计算直方图的方法。对于一幅图像I,Q表示图像的量化版本,其量化范围为{1,2,…,q},对每个i≤q,当Q(x,y)=i
Qi(x,y)=1
(6)
通过计算某区域Qi的和即可得到该区域Q内等于i的元素的个数。因此,对于某一个区域内的直方图,可以对相应区域的直方图通道Qi进行加减运算得到。
4)梯度直方图
梯度直方图是一种加权的直方图,通过梯度方向计算它的容器的索引,通过梯度的幅值计算其相应的权值。当Θ(x,y)=θ时,其梯度通道计算表达式为
Qθ(x,y)=G(x,y)
(7)
式中:G(x,y)表示图像在(x,y)处的梯度幅值;Θ(x,y)表示其梯度方向。对原图像进行不同尺度的变换,可以得到不同尺度的梯度。此外,可以借助梯度幅值对梯度直方图进行归一化。若使用L1范数对梯度直方图归一化[9],则此时可用于逼近图像的HOG特征。
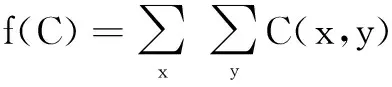
PiotrDollar等人实验表明,由Luv颜色通道、梯度直方图通道和梯度幅值通道组合成的通道特征性能最好。因此本文采用这3种通道作为车辆图像的积分通道特征。车辆图像积分通道特征提取算法的流程如图7所示。
图7 提取积分通道特征流程图
将车辆图像划分为大小不一的block,获取丰富的特征信息。计算每个block的积分图像,一阶积分通道特征就是每个block区域各通道之和。
图像的SURF特征具有尺度不变性、旋转不变性及光照不变性,但SURF特征提取到的车辆特征点数较少,特征描述较为粗糙(如图8),积分通道特征可以从图像的不同角度收集各种特征信息,但积分通道特征在图像尺度、旋转、光照变化不具有不变性,因此本文尝试将SURF特征与积分通道特征结合起来作为车辆图像的特征向量。
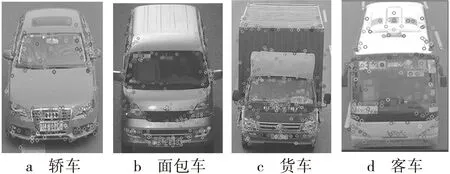
图8 4种车辆图像SURF特征点的检测结果
3 实验结果
4种车型图像SURF特征点的检测结果如图8所示。
车辆图像的Luv颜色通道、梯度幅值通道、梯度直方图通道如图9所示。
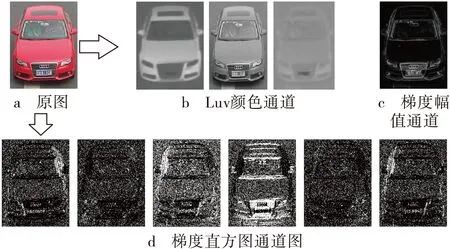
图9 车辆图像积分通道
为了验证本文特征提取算法的有效性,为车型识别系统选取较可靠的特征,本实验利用SVM分类器分别用提取的车辆特征对4种车型图像进行识别。其中,训练样本每类车型300张,测试样本每类车型200张,样本尺寸归一化大小为96×128。以下前3个实验是在Matlab平台下进行,后4个实验是在VS2010平台下进行。因此前3个实验与后4个实验在识别时间上没有可比性。实验结果如表1所示。
表1SVM对不同特征的识别结果
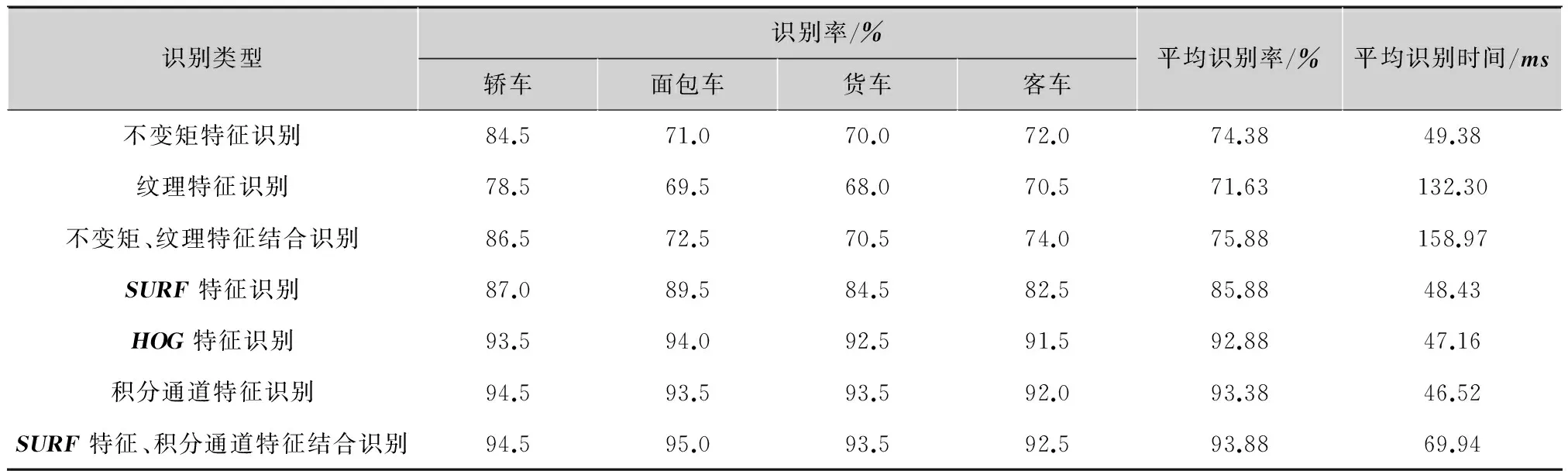
识别类型识别率/%轿车面包车货车客车平均识别率/%平均识别时间/ms不变矩特征识别84.571.070.072.074.3849.38纹理特征识别78.569.568.070.571.63132.30不变矩、纹理特征结合识别86.572.570.574.075.88158.97SURF特征识别87.089.584.582.585.8848.43HOG特征识别93.594.092.591.592.8847.16积分通道特征识别94.593.593.592.093.3846.52SURF特征、积分通道特征结合识别94.595.093.592.593.8869.94
由表1可以看出,在使用SVM分类器对7种不同特征及组合进行车型识别时,SURF特征与积分通道特征结合特征量的平均识别率最好,达到了93.88%,比SURF特征和积分通道特征各自的识别率都有所提高。
SURF特征与积分通道特征的结合,弥补了因SURF特征提取的车辆特征点数较少造成特征描述较粗糙的缺陷,而SURF也弥补了积分通道特征在图像尺度、旋转、光照变化方面的不足,使得结合后的特征向量具有较丰富的特征信息,且对车辆图像具有尺度、旋转及光照的不变性。
4 结束语
针对正面车辆图像的车型识别,提取并分析了车辆图像的SURF特征和积分通道特征,考虑到图像的SURF特征具有尺度不变性、旋转不变性及光照不变性,但SURF特征提取到的车辆特征点数较少,特征描述较为粗糙,而积分通道特征可以从图像的不同角度收集各种特征信息,但积分通道特征在图像尺度、旋转、光照变化不具有不变性。本文提出将SURF特征与积分通道特征结合起来作为车辆图像的特征向量,结合的特征向量解决了它们各自的缺陷,同时保留了它们各自的优点,具有丰富的特征信息,且对车辆图像具有尺度、旋转及光照的不变性,可作为车型识别的特征向量。
[1]朱永珍,孟庆虎,普杰信.基于HSV色彩空间与形状特征的交通灯自动识别[J].电视技术,2015,39(5):150-154.
[2]李玥灵,吴国平,耿秀秀,等. 基于LBP-GLCM纹理特征提取的服装图像检索[J]. 电视技术,2015,39(12):99-103.
[3]MAHIH,ISABATENH,SERIEFC.ZernikemomentsandSVMforshapeclassificationinveryhighresolutionsatelliteimages[J].Theinternationalarabjournalofinformationtechnology,2014,11(1): 43-51.
[4]REYES-LOPEZJ,CAMPOSS,ALLENDEH,etal.Zernike'sfeaturedescriptorsforirisrecognitionwithSVM[C]//Proceedingsofthe2011 30thInternationalConferenceoftheChileanComputerScienceSociety. [S.l.]:IEEEComputerSociety,2011:283-288.
[5]景阳,刘琳,黄鸿志,等. 基于头肩HOG特征的快速行人检测[J].电视技术,2014, 38(15):227-230..
[6]DOLLARP,TUZ,PERONAP,etal.Integralchannelfeatures[C]//Proc.BritishMachineVisionConference.London:IEEE,2009: 247-252.
[7]吴月凤,何小海,张峰,等.SURF算法和RANSAC算法相结合的台标检测与识别[J]. 电视技术,2014,38(13):191-195.
[8]BAYH,ESSA,TUYTELAARST,etal.Surf:speededuprobustfeatures[J].Computervisionandimageunderstanding,2008,110(3):346-359.
[9]PORIKLIF.Integralhistogram:afastwaytoextracthistogramsincartesianspaces[C]//IEEEComputerSocietyConferenceonComputerVisionandPatternRecognition. [S.l.]:IEEE,2005:829-836.
凌永国(1988— ),硕士,研究方向为图像处理;
胡维平(1963— ),教授,博士,研究方向为自适应信号处理理论及应用、生物医学信号处理、图像处理及模式识别。
责任编辑:闫雯雯
VehicletyperecognitionbasedonSURFandintegralchannelfeatures
LINGYongguo1,HUWeiping2
(1. Department of Physics and Electronic Engineering,Guangxi Normal University for Nationalities,Guangxi Chongzuo 532200, China;2. Guangxi Key Lab of Multi-source Information Mining and Security,College of electronic engineering,Guangxi Normal University,Guangxi Guilin 541004, China )
Withtheincreasinglyseriousoftrafficproblems,thedevelopmentofintelligenttransportationsystem(ITS)technologyisparticularlyimpendency.AsanimportantpartofITS,vehicletyperecognitionsystemplaysakeyroleinITS.AvehicletyperecognitionmethodbasedonSURFandintegralchannelfeaturesisproposedforvehicleimage.Experimentalresultsshowthatthismethodcanrecognizethetypeofvehicleimageaccurately,efficientandrobustness.
vehicletyperecognition;vehiclefeature;SURFfeature;integralghannelfeatures;SVM
TP391.41
ADOI: 10.16280/j.videoe.2016.07.030
广西多源信息挖掘与安全重点实验室基金项目(13-A-03-02);广西民族师范学院科研支柱项目(2016YB038)
2015-09-02
文献引用格式:凌永国,胡维平. 基于SURF特征与积分通道特征的车型识别[J].电视技术,2016,40(7):139-143.
LINGYG,HUWP.VehicletyperecognitionbasedonSURFandintegralchannelfeatures[J].Videoengineering,2016,40(7):139-143.