汽车车身控制模块电路设计
2016-08-20李油成
李油成
(中国第一汽车股份有限公司天津技术开发分公司)
近年来,汽车电子技术发展迅速,装备的电子设备越来越多,对电子控制系统的要求也越来越高。以往的经济型轿车车身电子控制多以独立控制为主,采用多个控制器分别控制全车门锁、遥控及车灯等电气系统,目前集成式车身控制模块已成为车身电子控制的发展趋势。文章以Freescale公司生产的16位高性能单片机MC9S12XDP512为主芯片、CAN总线收发器TJA1050及LIN收发器TJA1020为节点模块,介绍了如何设计车身控制模块的硬件电路,包括:电源管理模块、输入接口电路、输出电路、CAN总线通信模块、LIN总线通信模块及RKE接收模块选型等。
1 总体方案设计
针对国内某自主经济型品牌轿车,其车身控制模块主要功能包括:中控锁功能、遥控锁功能、中控解锁行李箱盖锁功能、遥控解锁行李箱盖锁功能、转向灯和危险报警灯控制功能、刹车灯控制功能、昼间行驶灯控制功能、前室内灯控制功能、前后雾灯控制功能、小灯未关蜂鸣器报警、LIN总线及CAN总线。车身控制模块系统框图,如图1所示。
2 电路设计
2.1 电源管理设计
车身控制模块的电源管理设计上,采用12 V转2.5 V的供电系统,使用Holtek公司的HT7533-1电源芯片,该电源芯片有低功耗、低压降、低温度系数、高输入电压及高输出电流等特点,电源模块框图,如图2所示。
输入保护部分能抑制外接电压、电流冲击或电路反接,多数采用压敏电阻、稳压二极管及防反接二极管组成,确保在恶劣环境下电源模块的正常工作;电源滤波部分主要有较大容量的极性电容和较小容量的瓷片电容并联,滤除各种可能的干扰。本电路设计中使用∏型滤波结构,从根本上防止干扰信号在电源电路中的传播;电压转换部分采用HT7533-1电源芯片,输出滤波部分阻止电路中产生的杂波干扰电源,起到稳定系统电压的作用。
2.2 输入接口电路设计
在本设计中,输入信号均为数字输入信号,其状态主要取决于外部开关的状态,如中控解闭锁开关等。数字输入接口电路为通用型的数字输入接口电路,电路中包含输入电路(上下拉电路)、RC滤波电路及主MCU端口分压电路。接口电路图,如图3所示。
数字输入电气特性,如表1所示。上下拉电阻的选取,主要考虑到开关的特性,通过上下拉电阻使开关通过一定的润湿电流,可以维持一定的小电弧清理开关触头表面的尘垢和腐蚀,以保证开关触点状态良好。
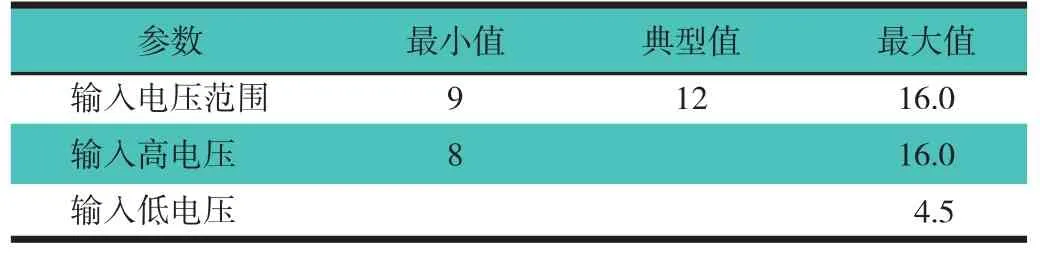
表1 车身控制模块的数字输入电气特性表 V
2.3 输出电路设计
车身控制模块的负载主要有门锁电机、白炽灯及LED灯等,根据负载特性不同,分别采用了高边驱动、低边驱动及内部继电器驱动的方式,驱动方式列表,如表2所示。
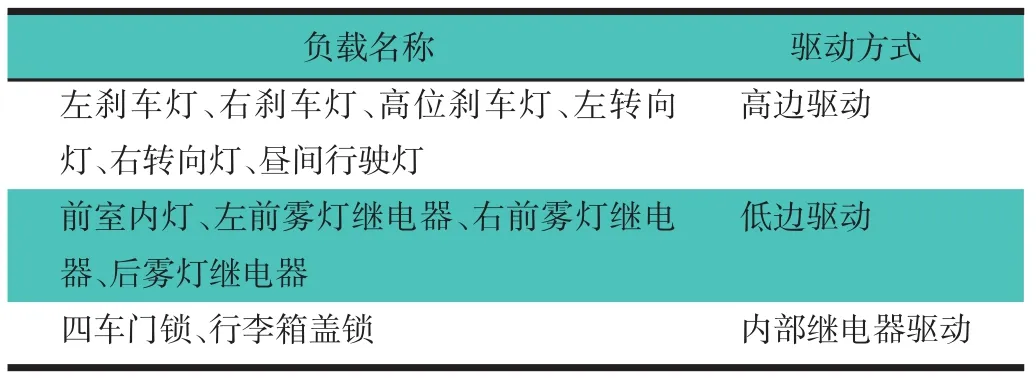
表2 车身控制模块的负载驱动方式列表
2.3.1 高边驱动电路设计
在器件选型上主要选用英飞凌公司的BTS5020-2EKA高边驱动芯片。该芯片是20 mΩ双通道智能高边功率开关,内置PG-DSO-14-40EP,散热焊盘封装,具有保护和诊断功能。功率晶体管是一个带有电荷泵N通道垂直功率MOSFET,该器件整合了Smart6高压技术,是针对在严苛的汽车环境中驱动灯泡(2个27 W或21 W加5 W)和LED灯而特别设计的。高边驱动电路图,如图4所示。
2.3.2 低边驱动电路设计
在器件选型上主要选用英飞凌公司的TLE7240SL低边驱动芯片,该芯片是8通道低边开关,采用PG-SSOP-24-7封装,具有嵌入式保护功能,针对在汽车环境中应用的继电器的驱动器而特别设计。利用串行外设接口(SPI)控制并诊断器件和负载。对于直接控制及PWM控制,共有4个可用的输入引脚。该芯片是单片集成,功率晶体管是一个N通道的MOSFET。低边驱动电路图,如图5所示。
2.3.3 内部继电器驱动电路
在器件选型上主要选用ULQ2003ADRRBG4驱动内部继电器,其电路图,如图6所示。该芯片为汽车类高电压、大电流达林顿晶体管阵列,主要特性:1)高压输出50 V;2)输出钳位二极管;3)输入兼容各种类型的逻辑电路;4)用于继电器驱动器。
2.4 CAN总线通信模块设计
将车身控制模块作为CAN和LIN网关节点,CAN通信遵循ISO11898通讯协议。本部分采用TJA1050作为CAN收发器。CAN收发器搭建了CAN控制器与物理总线之间通信的桥梁,它的主要作用是完成CAN总线上差动电平与节点逻辑电平之间的转换,使CAN控制器完成报文向总线的差动发送以及从总线差动接收报文成为可能。
TJA1050芯片的主要特性:1)与ISO11898标准兼容;2)极低的电磁辐射;3)最多可连 110 个节点;4)没有供电的节点不干扰总线;5)对电源和地的短路保护功能;6)发送数据控制超时显性功能;7)在汽车环境下对总线引脚的瞬态保护和热保护。电路设计,如图7所示。
2.5 LIN通信模块设计
在车身控制领域,作为局域网CAN总线的有效补充,本地互联网LIN总线以其成本低廉的特点有效地解决了分布式控制带来的成本增加问题。在通信速率要求不高、成本要求更高的经济性轿车车身控制系统上,LIN总线得到了大规模的应用。本设计中,车身控制模块为LIN主节点,采用LIN总线收发器TJA1020,通过该芯片的TXD与RXD引脚与主MCU的异步串口接口SCI配合,完成LIN报文帧的接收和发送。
TJA1020芯片的主要特性:1)波特率最高达20 kB/s;2)极低的电磁发射(EME);3)高抗电磁干扰性;4)低斜率的模式进一步降低EME;5)未通电状态下的无源特性;6)输入电平3 V与5 V兼容;7)集成的终端电阻用于LIN的从应用;8)唤醒源识别(本地或远程)。电路设计,如图8所示。
2.6 RKE接收模块选型设计[1]
RKE接收模块包括接收天线、高频接收芯片及电子元器件等。遥控接收模块中的接收天线接收到遥控钥匙发射的电磁波能量后,通过高频接收芯片转换为电信号传送给MCU,MCU通过软件解码对遥控钥匙信号进行识别处理,如果钥匙信号是MCU存储的遥控钥匙序列号,则车身控制模块进行相应的开闭锁动作,从而实现遥控汽车门锁的远距离控制。
一款性价比好、高灵敏度、抗干扰能力强及宽接收带宽的高频接收芯片是车身控制模块高频接收设计成功的前提保证。接收天线的固定方式有外接式、内嵌式及PCB式等。PCB式为在车身控制模块的印刷电路板上直接设计印制天线,但要避开大面积接地区及其它感性器件的影响。PCB式接收天线的成本最低,通过PCB式接收天线与高频接收芯片天线端的LC网络进行适配,保证最佳的驻波比。另外要根据车身控制模块在车身上的位置,来设计天线的方向,确保360°内所有方向上接收距离均能满足要求。
接收模块设计中要考虑到接收灵敏度、遥控接收制式及定频跳频技术的要求。
2.6.1 接收灵敏度
接收灵敏度为车身控制模块能够接收有用信号的最小功率。它是检验车身控制模块接收微弱信号的能力。接收灵敏度与RKE钥匙功率、接收天线布置及高频接收芯片等有关。一般情况下,RKE钥匙功率越大,接收灵敏度越小,传输距离就会越远。但在实际应用中无线电信号传输要受到大气、阻挡物及天线等多种因素影响。该车身控制模块的接收灵敏度设计值为-95 dBm。
2.6.2 遥控接收制式(ASK及FSK技术)[2]
幅移键控(ASK)相当于模拟信号的调幅,只不过与载波相乘的是二进制码,载波在二进制基带信号“1”或“0”的控制下实现通或断,即用载波幅度的有或无代表信号的“1”或“0”,这样就可以得到ASK信号,这种二进制幅移键控方式称为通断键控。2ASK信号典型数字和时域波形图,如图9所示。
频移键控(FSK)是利用载波的频率参量来携带数字信息的调制方式。常用的是二进制频率键控信号,即2FSK。2FSK信号典型数字和时域波形图,如图10所示。
ASK调制中,发送代表“0”数据时,发射天线上是没有载波发出的,此时接收器是被动地等待发送的数据,如果采样时间内没有信号的跳变,就认为是“0”,但是现实空间存在很多的干扰,造成接收器无法正常解调信号。FSK调制中,发送代表“0”数据时,是高频的载波,需干扰到整个频点上才能干扰,它受到干扰较小,接收器能正常解调信号,因而FSK接收性能要优于ASK。
当“0”数据发送时,ASK是没有载波信号发出的,因此,硬件功率消耗很低,基本可以忽略,但FSK调制方式还需要有高频载波发出,功耗与发送“1”数据功耗一致。因此,在工作状态下,FSK功率消耗约为ASK功率消耗的2倍。以汽车遥控系统ASK与FSK的遥控寿命为例,ASK寿命计算:N(有效次数)=电池有效容量/(按键平均电流×按键时间)=225 mA·h×50%/(150 mA·h×100 ms/3.6×106)=27 000次;T(天数)=有效次数/(每日的按键次数)=N/(20次/天)=1 350天。FSK寿命计算:N(有效次数)=电池有效容量/(按键平均电流×按键时间)=225 mA·h×50%/(280 mA·h×100 ms/3.6×106)=14 423次;T(天数)=有效次数/(每日的按键次数)=N/(20次/天)=721.1天。通过计算得知:遥控器使用ASK调制方式的寿命比FSK调制方式多600多天。
本设计中车身控制模块遥控距离要求为15 m,当遥控距离<15 m时,ASK与FSK相当,由于ASK制式钥匙功率消耗低、占用带宽窄,且成本低,因此遥控信号采用ASK制式,即遥控接收芯片也选用ASK制式。
2.6.3 定频跳频技术
定频即为遥控信号固定在一种频率,如433.92MHz。跳频即为遥控信号在2种不同频率上相互转换(433.92 MHz+150 kHz及 433.92 MHz-150 kHz),这 2种不同频率的数据依次发送。遥控端(遥控钥匙),发送每组数据时,设定不同的发送频率(如取2组,第1组频率为433.92 MHz+150 kHz;第2组频率为433.92 MHz-150 kHz),这2种不同频率的数据依次发送。接收端(车身控制模块)事先设定2组对应的接收频率,从而实现跳频。跳频相对于定频,可降低同频干扰发生的概率,但需有支持跳频技术的发送和接收芯片,因此成本会有所增加。经调查得知,在国产经济型轿车上,大多采用定频技术。因此本设计中,高频接收芯片为定频接收芯片TDA5210。
3 结论
该车身控制模块不仅可以直接利用数字输入端口采集信号进行执行器的控制,还可作为CAN/LIN网关进行总线上的数据交互。主MCU预留部分引脚和外围电路预留部分接口可作为今后功能升级,为实现车身控制系统平台化提供有力的保障。
