《线性动态系统理论与设计》课程案例化教学改革与实践
2016-08-19黄景涛邱联奎
黄景涛 邱联奎


摘要:在硕士研究生的课堂教学中,案例教学起着重要的作用。本文通过总结在线性动态系统理论与设计课程教学的改革与实践,提炼和设计了直线二级倒立摆系统教学案例,通过系统原理介绍和任务设计,将课程主要内容有机串联,为学生学习该门课程提供了一个直观形象的实物载体,结合案例进行课程教学,改变了该课程理论性强、数学味浓带来的学生学习困难问题,起到了较好的教学效果。
关键词:线性动态系统;教学改革;案例教学;直线二级倒立
中图分类号:G642.0 文献标志码:A 文章编号:1674-9324(2016)31-0085-03
一、引言
线性动态系统理论与设计是电气工程、控制科学与工程等学科的专业基础课程,包括清华大学、浙江大学、斯坦福大学、麻省理工学院等国内外重点大学均开设了类似课程。该课程的研究对象是各种实际系统抽象出来的、形式上具有統一性的具有线性属性的一类动态系统,借助线性代数和矩阵分析的方法,进行系统分析与控制器设计方法的训练,培养学生对系统进行数学建模、分析与推理能力,使学生具备利用数学工具对控制系统进行理论描述、系统分析和控制器设计的综合能力[1-3]。
该课程作为控制科学与工程、电气工程等学科硕士研究生核心课程之一,以往教学过程主要注重基础理论和基本方法的讲授,作为分析工具的数学在教学过程中所占比例较大。随着研究生教育规模的扩大,根据地方普通高校研究生的现状,需要在讲授基础理论和基本方法的基础上,突出相关理论、方法的工程应用背景[4]。
二、教学案例设计
根据线性动态系统理论与设计课程的特点及在学科中的基础性,教学案例需要在教学过程中结合学生基础知识及课程基本理论、方法进行选择与设计。根据多年的教学实践,本课程选择典型的直线二级倒立摆作为教学案例。直线二级倒立摆作为典型的机电一体化抽象模型,是人形机器人等实际系统的物理模型。该系统是一个非线性自然不稳定系统,通过该系统可更直观地展现动态系统的稳定性、能控性以及系统状态的收敛速度等抽象概念[3]。由于该系统的典型性,已有大量文献资料可供参考,便于在Matlab/Simulink仿真环境中分析、验证,结合实验室原有的物理实验装置,可对线性动态系统的分析、综合进行实际实验验证[5]。
(一)直线二级倒立摆物理模型
直线倒立摆是在直线运动模块上装有摆体组件,直线运动模块有一个自由度,小车可以沿导轨水平运动,从而保持倒立摆系统的平衡与稳定,系统组成如图1所示。为简化系统,在建模时忽略了空气阻力和各种摩擦,并认为摆杆为刚体。
其中,M为小车质量,m1为摆杆1的质量,m2为摆杆2的质量,m3为质量块的质量,l1为摆杆1中心到转动中心的距离,l2为摆杆2中心到转动中心的距离,θ1为摆杆1与竖直方向的夹角,θ2摆杆2与竖直方向的夹角,F为作用在系统上的外力。
三、案例化教学方式实践
结合实例在建立系统状态空间模型后,可基于该系统模型对系统的能控性、能观测性等进行分析,在课程内容的运动分析、能控性、能观测性以及稳定性分析相关的基本理论与方法时,结合该系统进行讲解,使抽象的、数学化的理论方法具有明确的物理含义,便于学生理解与掌握相关原理、方法。
1.系统开环仿真。结合该案例,要求学生利用Matlab/Simulink仿真环境建立系统模型,并进行相关算例的编程计算、系统分析。系统的Matlab/Simulink模型如图2所示。
其中“State-Space”模块为直线两级倒立摆的状态方程,双击模块可打开模型进行参数设定。
建立好系统仿真模型后,对系统进行开环仿真,仿真结果如图3所示。从仿真结果可以看出,系统发散,为使系统稳定,需要对其添加控制器。
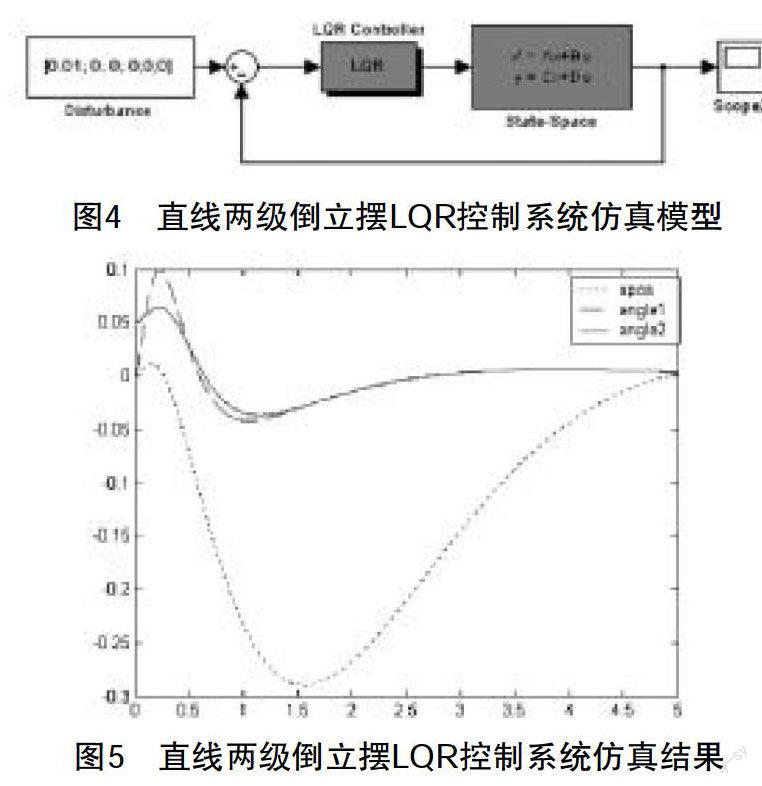
2.控制器设计与仿真。为使系统稳定,需要针对该系统设计闭环控制器,采取状态反馈的形式进行控制器设计,控制率采用线性二次型最优控制(LQR)方法,仿真模型如图4所示。根据LQR控制方法的原理,可计算出控制器状态反馈矩阵的参数为K=[1 73.818 -83.941 2.0162 4.2791 -13.036],仿真结果如图5所示。
由图5可见,系统虽然可以稳定,但系统稳定时间过长,根据LQR的基本原理,可知要增加系统响应速度,需增加权重Q的值。
设Q11=300,Q22=500,Q33=500,对应的LQR控制器参数为K=[17.321 110.87 -197.57 18.468 2.7061 -32.142],仿真结果如图6所示。
由图6可以看出,系统可以很好的稳定,在给定倒立摆干扰后,系统在2.5秒内可以恢复到平衡点附近。通过对参数的重新设置,观察仿真结果,进而加深对相应控制方法的理解和掌握。
3.实时实验验证。根据上述仿真结果,选取具有较好响应的控制器参数进行实时控制实验,对比验证控制方法在实际系统上的控制效果,由于实际系统存在干扰信号、检测信号噪声、机械摩擦等实际情况,一般而言,实物系统上的控制效果与仿真结果会有一定差异。
实物实验验证在实验室的直线二级倒立摆平台上进行,控制算法仍可基于Matlab/Simulink进行。实时控制系统如图7所示。
四、结论
案例化教学方式的实施,除了教学案例的引入、课程教学组织的变化,学生的深度参与对于教学效果更为重要,在教学过程中要求学生在仿真环境中自行建立系统模型,对系统性质进行分析,在此基础上,尝试设计控制器,可覆盖课程大部分内容,通过案例将各知识模块和方法有机联系在一起,使学生进一步明确课程内容对于实际系统的作用,一方面可提升学生学习的目的性、积极性,同时训练了学生分析问题、解决问题的能力。
参考文献:
[1]郑大钟.线性系统理论[M].第2版.北京:清华大学出版社,2002.
[2]Chi-Tsong Chen. Linear system theory and design,3rd edition. New York:Oxford University Press,1999.
[3]王晓兰,李恒杰.“线性系统理论”课程教学案例的设计[J].电子电气教学学报,2013,35(2):21-23.
[4]齐晓慧,王永川,董海瑞.研究生“线性系统理论”课程教学改革与实践[J].中国电力教育,2010,(32):82-84.
[5]高荣,刘晓华.线性系统理论教学改革探讨与实践[J].中国科教创新导刊,2008,(30):85.
