基于DSP的地下停车场车流量视频检测的改进算法
2016-08-18王骁,李博,张硕
王 骁,李 博,张 硕
(中北大学仪器科学与动态测试教育部重点实验室,太原030051)
基于DSP的地下停车场车流量视频检测的改进算法
王骁,李博*,张硕
(中北大学仪器科学与动态测试教育部重点实验室,太原030051)
针对DSP平台的车流量视频检测算法存在实时性不佳,漏检率较高的问题,提出了一种改进的单帧图像差分算法,实现了基于TMS320DM642平台的地下停车场车流量视频检测。算法采用对单帧图像一条检测线的灰度值做差分运算,通过对灰度值变化的幅度进行分析,提取出车辆的特征信息,实现了处理对象从一个面到一条线的转变。此外算法结合双帧背景,可以有效地改善漏检现象。实验表明,该算法在运算量上相比于主流算法减小了3个数量级,同时检测准确率可达到93%,是一种实用高效的车流量视频检测方法。
视频检测;车流量检测;智能算法;TMS320DM642
车流量数据的采集是智能交通系统中一个十分关键的组成部分[1]。因而对于运动目标的检测,国内外学者们提出了大量的理论和方法,最具代表的方法有光流法[2]、帧间差分法[3]、背景差分法[4]。光流法可以看成带有灰度的像素点在图像平面上运动而产生的瞬时速度场,以此建立方程并通过约束方程联立求解,获得运动物体的位置变化,其检测精度高但运算量庞大。帧间差分法利用时间相邻的两帧图像之差来判断物体,其运算量较大,易受噪声的干扰,检测目标的完整性受到目标速度的影响;背景差分法一直是运动目标检测技术中的主流方法,将当前图像与背景模型进行差分运算,通过判定灰度特征的变化检测目标。其检测性能与背景建模的好坏息息相关,这导致了运算量大幅增加。鉴于DSP的运算能力和系统的应用价值,在保证检测准确性的前提下,必须降低算法的运算量,为此本文改进了运动目标检测的算法,同时使用双背景帧辅助检测减少了漏检的发生。
1 算法的改进
1.1图像差分算法的改进
目前通用图像差分算法的基本思想是将视频图像序列中相邻两帧相减或者将被测帧与标准帧相减,从而能有效地屏蔽做差的两帧图像之间的相同区域,仅保留两帧间存在差异的区域,进而检测出处于运动的图像信息[5]。这种方法不仅要对图像内的每一点做差分运算,而且会增加做差后图像的噪声。
收稿日期:2015-06-12修改日期:2015-09-02
本文改进的差分算法是基于对同帧图像做差分运算。将图像中某一行或某一列内相邻两点像素的灰度值做差分运算,见式(1)与式(2)。

式(1)表示对同一行的像素点进行差分运算,式(2)为对同一列的像素点进行差分运算。以式(1)为例,In+1(xn+1,y)与In(xn,y)分别对应同一行相邻两点的灰度值,Bn(xn,y)为差分运算的差值。理论情况下,当该行没有运动物体经过时,各点的差值全为0;当出现运动物体时,由于运动物体的灰度值不同于背景原有的灰度值,因此运动物体边缘点与相邻背景点灰度值的差值会明显大于或小于其他任意两点的差值,确定Bn(xn,y)max或Bn(xn,y)min中的n值,来勾勒运动物体在图像中的位置。原理如图1所示。
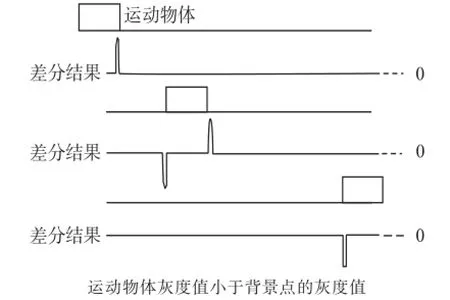
图1 理想的差分原理图
需要注意的是若运动物体的灰度值大于背景点,则差分结果与上图相反。但是在实际情况中,同一运动物体以及背景各点像素的灰度值会有所差异,同时必定存在噪声,实际差分运算结果如图2所示。
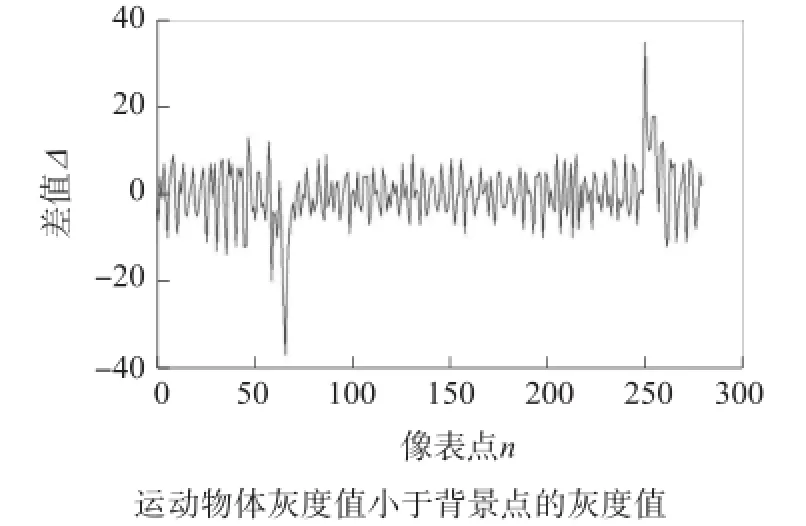
图2 实际差分运算结果
由图2可知,纵使存在噪声干扰和灰度值不一的影响,导致了差值不全为0,但是运动物体边缘点及相邻几点的差分结果依旧明显不同于其它点的差值,同样能判定出运动物体在图像中的位置。
常规图像差分算法是建立在对所有像素点灰度值的大小的分析,而本文的图像差分算法则是对一系列像素点灰度值变化的幅值分析。这种算法具有以下优势:
(1)算法简介,运算量小,实时性强。只需要对车辆经过区域中的某一行或某一列进行计算。
(2)车速的快慢以及静止都对检测结果没有影响。
(3)无需进行复杂的背景建模,只需要更新检测区域的背景以及做相应的处理。
1.2车流量检测算法的改进
车流量检测可分为基于模型的检测和基于非模型的检测方法[6]。对运算速度和效果的综合考虑采用基于非模型的检测方法,即仅对图像中特定虚拟检测区域内的运动像素点信息(亮度或灰度)进行运动分析,当像素点按照一定的规律变化时,认为检测到车辆。为了确保主流算法的可行性,致使虚拟检测区域必须设置为检测框或多条检测线,从本质上造成了运算量的增加。
本文算法设置的虚拟检测区域为一条检测线,如图3所示。
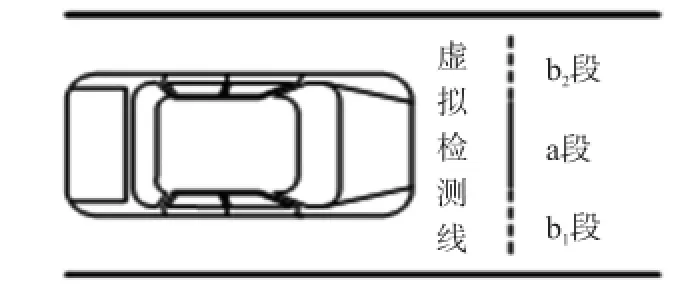
图3 虚拟检测线的设置
虚拟检测线的总宽度略小于路面宽度,a段作为区分车辆与行人的辨别线,其宽度为小型车辆宽度的1/2,b1与b2段做为车辆计数线。对a段使用常规差分运算,即当前帧减去背景帧中相应的像素点。若有车辆体经过时,像素点的灰度值必然发生规律性地变化,根据车辆的颜色信息相应地变大或变小。鉴于行人与车辆占据的像素点数存在明显差异,当a段各点的灰度值都发生规律性地变化时,则初步认为是车辆。此时使用式(1)和式(2),开始对b1、b2段内各点进行优化后的差分运算,若能体现出车辆边缘轮廓时,则确定为车辆。当车辆完全驶离检测线,即恢复到没有车辆时的状态,此时认定车辆通过,计数加1。鉴于前车没有完全驶离,后车不会进入检测线,致使不会因为行车距离较近而出现漏检。没有车辆经过时的差分运算结果如图4所示,行人经过时如图5所示,车辆经过时如图6所示。
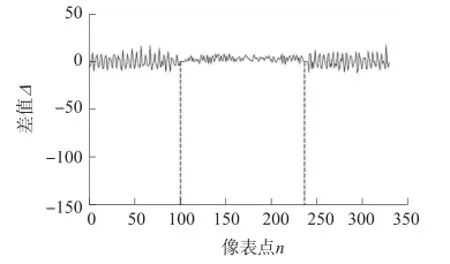
图4 没有车辆通过时的差分结果
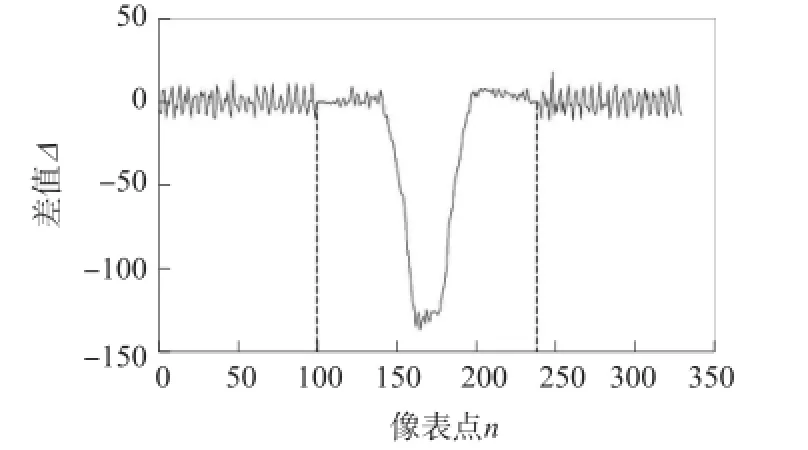
图5 行人经过时的差分结果
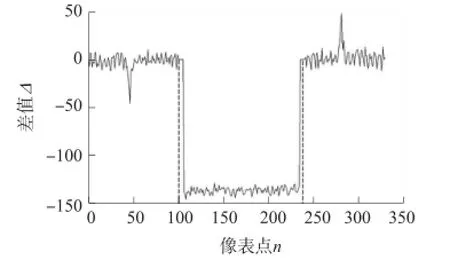
图6 车辆通过时的差分结果图
上述各图中,虚线内为a段检测区域对应的像素点,其余为b1段与b2段对应的像素点。由图4可知,由于存在噪声干扰,在没有运动物体经过时,其差分结果在0值附近正负随机分布。由图5可知,行人占据的像素点明显少于车辆。由图6可知,a段内各点的差分结果均小于0且差值基本相等,说明车辆的灰度值小于路面的灰度值;此外a段各点差值的绝对值明显大于b段两点最值的绝对值,这是由于摄像机清晰度不高和车辆边缘平滑导致的,将b段中最值附近几点的差值相加并取绝对值,可发现其和接近于a段的平均值,对应了灰度值的变化幅度。
1.3背景建立算法的改进
背景的建立与差分运算的准确性密切相关。由于道路环境复杂,天气的影响,以及DSP的可操作性,目前主要使用背景自适更新法或者多次帧间差分平均法[7],但是鉴于本文是基于地下车库的车辆检测,其外界环境简单,不易受到天气影响,可直接捕捉画面作为背景帧,因此在减少算法运算量的同时准确性也得到保证。
此外无论使用哪种方法确立的背景均为单一背景,当车辆颜色与路面颜色相近时,差分运算无法准确辨认出车体,导致了算法的局限性。本文采用备用背景帧辅助的方式,进行车体辨认,见式(3)。

式中,B(xn,yn)为真实背景帧内一点的灰度值,A为根据实际情况设定的数值,B1(xn,yn)为备用背景帧内一点的灰度值。当前帧对真实背景帧和备用背景帧做差分运算,若车体颜色与路面相近时,备用帧的差分结果会出现规律性变化;若车体颜色与路面不相似,真实背景帧的运算结果会出现规律性变化。本文算法为了减少运算量,只对检测区域的背景进行处理,设定A=-50。此外设定车辆通过后或30 min内没有车辆通过,更新虚拟检测线区域的背景。
2 算法的DSP实现
算法的基本流程如图7所示。
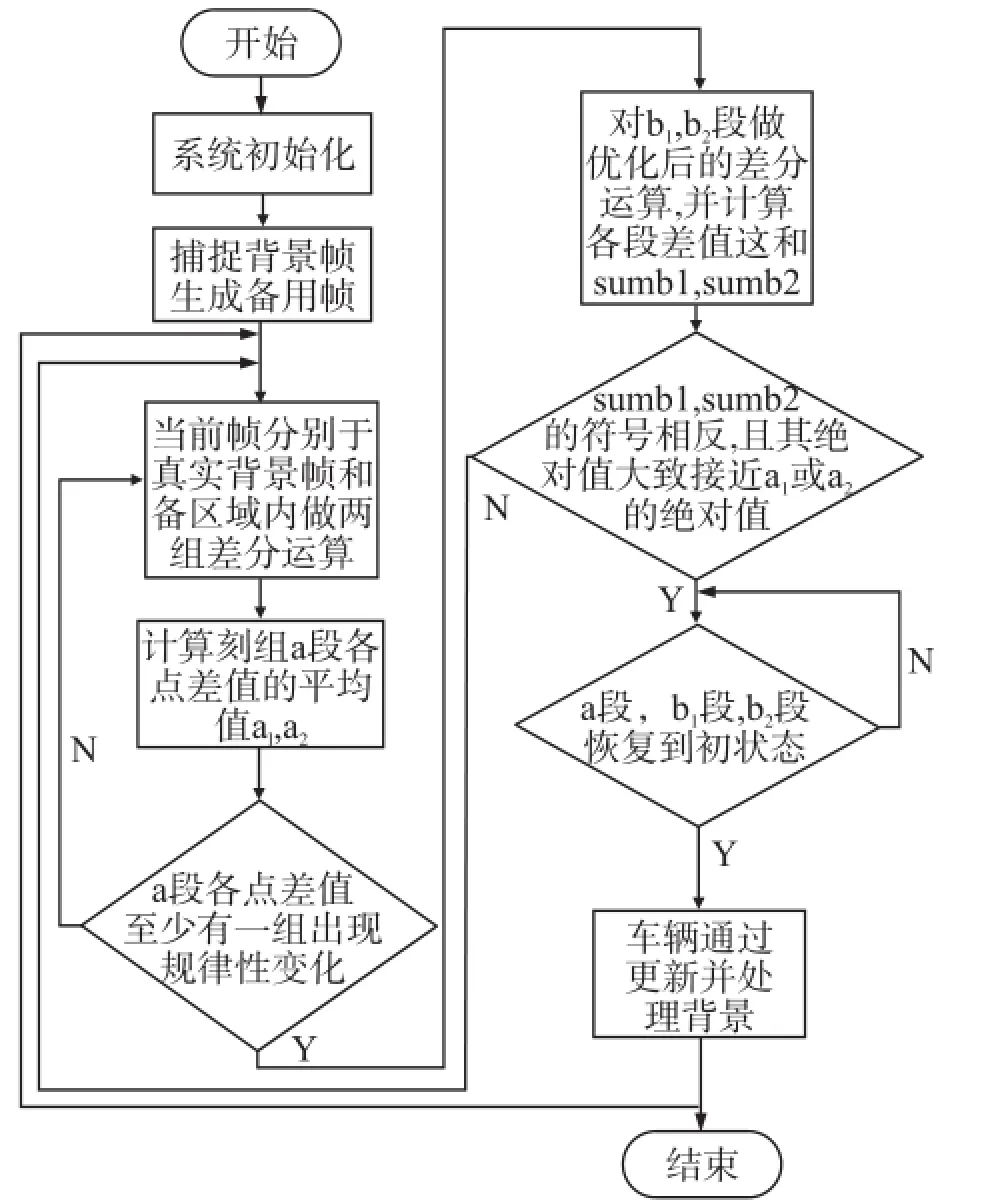
图7 算法基本流程
对a段做的两次差分运算,只要有一组出现规律性变化(|a1|或|a2|大于50),则初步认定为车辆通过。b1、b2段非边缘点差分结果因为误差在0值附近正负随机分布,边缘点体现了灰度值的跃变,将所有点的差分结果相加,在抵消一定误差的同时,灰度值的特征变化依旧得到保留。视频检测系统采用CCD摄像头从道路中央以俯视的角度拍摄[8],越靠近图像底部的地方车辆间隔越大。根据这个特点,检测线的位置应设置在图像底部。同时考虑到地下停车场限速,车辆在短时间内不会出现较大的位移,为了减少运算量,设定1 s内对15帧画面进行处理。对地下停车库进行实地测试,如图8、图9所示。

图8 实地测试图1

图9 实地测试图2
3 运算量对比及实验结果分析
基于背景差分的虚拟线框车流量检测法是目前主流的视频检测法。将改进的算法在运算量与上述算法进行对比,如表1所示。
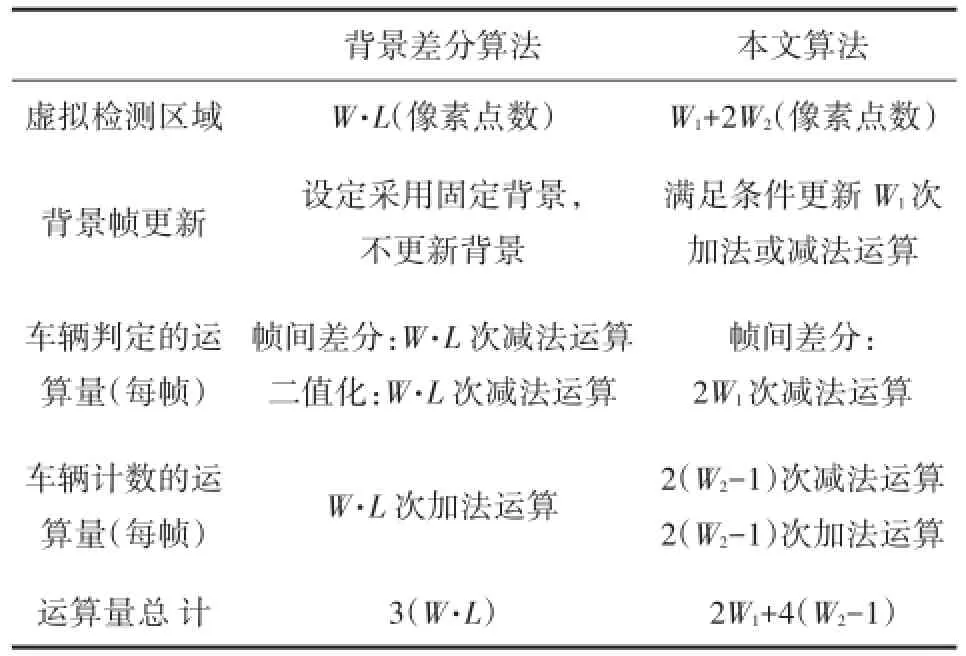
表1 运算量对比
根据摄像机高度及拍摄角度等实际情况,本文算法设定W1=130,W2=100。背景差分法一般设定W略小于车宽,L为车身的 1/3[9],设定 W=240,L= 220。由上表可知,对于每一帧画面,背景差分法在车辆判定上需要105 600次减法运算,车辆计数需要52 800次加法运算,总计158 400次加减运算;而改进后的算法对于每一帧画面,在车辆判定上需要260次减法运算,车辆计数需要396次加减法运算,若背景更新需要130次加法或减法运算,总计786次加减运算。可直观的发现本文算法在运算量上与目前主流算法相比,减少了3个数量级,大幅度减少了运算量,提高了车流量视频检测的实时性。同时为了检验该算法的有效性,对地下停车场的单车道进行了测试,实验结果如表2所示。

表2 实验结果
漏检是因为车辆跨线或压线行驶,导致b段不能确定车辆的边缘。由实验效果可知,本算法在单车道这种特定场合下,有优良的检测试结果,能满足地下停车场实际场合的工程需求。
4 结论
该算法在利用同帧内对相邻像素点做差分运算的思想,大幅度减少了运算量;改进原有的车辆检测提取方式,解决了低车距行驶而造成漏检的问题;增加了备用背景帧辅助车辆检测,解决了车体颜色与路面相近而不易判定的问题;算法简洁,易于推广,增强了DSP平台的可移植性。如何解决由车辆压线、跨线行驶而造成的漏检是下一步努力改进的方向。
[1] Tomizuka M.Automated Highway Systems:An Intelligent Transportation System for the Next Century[J].IEEE International Symposium on Industrial Electronics,1997(1):1-4.
[2] 袁国武,陈志强,龚健,等.一种结合光流法与三帧差分法的运动目标检测算法[J].小型微型计算机系统,2013(3):668-671.
[3] 屈晶晶,辛云宏.连续帧间差分与背景差分相融合的运动目标检测方法[J].光子学报,2014,7:219-226.
[4] 肖儿良,毛海军,鞠军平,等.基于开源软件MJPG_Streamer的智能视频监控系统设计[J].微电子学与计算机,2013:84-87.
[5] 郭玲.智能交通监控中运动目标检测的算法研究[D].广州:华南理工大学,2013:11-13.
[6] 刘小宁,陈晓冬,郁道银.基于DSP的运动目标识别与跟踪系统的设计[J].电视技术,2010(22):107-110.
[7] 徐永辉,杨京礼,林连累.TMS320DM642DSP原理与应用实践[M].北京:电子工业出版社,2012:123-124.
[8] 魏巍,李志慧,赵永华,等.基于智能相机的混合交通流检测方法[J].吉林大学学报(工学版),2013(4):866-870.
[9] 孙志海,朱善安.视频运动目标检测及跟踪算法测试平台设计与实现[J].电子器件,2009,32(1):97-99.

王骁(1990-),男,汉族,陕西汉中,中北大学仪器与电子学院硕士,主要研究DSP信号处理,valor98@aliyun.com;

李博(1972-),男,汉族,山西隰县,中北大学,硕士生导师,副教授,主要研究方向为精密检测设备、嵌入式电子电路系统,libo@nuc.edu.cn;

张硕(1990-),男,汉族,江苏徐州,中北大学仪器与电子学院硕士,主要研究DSP信号处理,946154458@qq.com。
An Improved DSP Based Algorithm for Underground Parking Lot Traffic Flow Detection
WANG Xiao,LI Bo*,ZHANG Shuo
(Key Laboratory of Instrumentation Science&Dynamic Measurement,Ministry of Education,North University of China,Taiyuan 030051,China)
Concerning about the defects that the current DSP based traffic flow detection algorithm has poor real time performance and high miss detection rate,an improved single-frame image differential algorithm was proposed. The proposed method is based on the TMS320DM642 DSP platform and realized underground parking lot traffic flow video detection.Differential operation is applied on the gray value of one detection line in a single frame image.The characteristics of the vehicles are extracted by the analysis of the gray value to make one dimension processing possible,taking place of conventional two dimension processing.In addition,the algorithm utilizes the dual-frame background to relieve the miss detection rate.The experiment result shows that the algorithm complexity is reduced by 3 orders and the accuracy reaches 93%which proves the proposed algorithm to be a practical and efficient method.
video detection;traffic flow detection;intelligence algorithm;TMS320DM642
TP391.4
A
1005-9490(2016)03-0741-05
EEACC:7210G10.3969/j.issn.1005-9490.2016.03.047
