基于粒子滤波的RFID传感器网络中不确定数据清洗算法
2016-08-18南楠
南 楠
(三门峡职业技术学院,河南 三门峡 472000)
基于粒子滤波的RFID传感器网络中不确定数据清洗算法
南 楠
(三门峡职业技术学院,河南 三门峡 472000)
RFID技术利用互联网将无线射频识别系统与软件连接可实现物品对象的跟踪,具有可追溯性能力,广泛地应用在供应链管理、资产跟踪、假冒检测等方面。然而,RFID阅读器在大规模的数据识别网络中由于环境和物理特性等所采集原始数据具有不确定性,严重影响其应用结果,为获取更准确数据提出一种可追溯性框架处理不确定性数据,应用粒子滤波技术采集本地数据,有效解决原始数据漏读、误读问题。实验结果表明,该算法可有效提高在大规模网络中采样的精确度与效率。
RFID;物联网;不确定数据;粒子滤波
0 引言
新一代产品信息网络的建立如物联网的形成,使RFID技术得到了广泛的应用,如供应链管理、制造业、分销物流、访问控制和防伪等。基于互联网有效的追踪产品获取相关信息,追溯其位置变化可以检索历史信息、存储位置、时间、改变过程,提高对周围事物的检测能力,在无法到达现场的情况下为决策提供关键性支持。但RFID技术带来利益的同时,仍然存在很多问题,由于环境因素和物理干预导致RFID读取数据通常是不完整、不准确,甚至是误读[1]。
不确定性数据一般分为:多读、漏读和重复读。通常处理的方法有两种:一种是从数据库中删除不确定性数据,对剩余数据进行分析处理,但这种方法将导致分析结果的不准确与不完整;另一种方法是采用过滤器的方法,基本思想是使用一个滑动窗口预先设定阈值,读数低于阈值读数为假舍弃不用,但这种方法基本以实际经验为基础,缺乏理论基础,不能得到广泛应用[2]。
本文提出了一种基于采样的粒子滤波技术来捕获原始射频识别数据,以概率分布为基础降低识别对象的噪声和等级,对对象识别数据建立节点获取数据。通过实验验证所提出的技术原型具有较高的有效性。
1 问题描述
RFID系统的工作主要是将读写器采集数据存入后台关系数据库中,处理系统直接获取数据进行处理分析。但是很多RFID在应用中都希望在海量的数据中发现异常数据给出提示,传统的RFID系统只适合于处理已存在于数据库的数据,不适合对流动的、实时数据进行查询。在供应链管理、生产监控等领域,流动性数据的处理是目前最广泛的应用,时间和事件发生位置将成为主要获取目标,这就造成了数据的不确定性。
在整个RFID构成的网络中,涉及到多个数据源,例如射频识别器、传感器和其他分布式数据源等,这些数据源产生大量的数据集包含与标记对象相关联的运动信息。标签和读写器之间的距离,或标签和读写器天线间的方向都会使传感器获取信息不准确和不可靠[3]。这些都意味着对象的位置、时间、跟踪信息成为推断和估计原始射频识别数据的关键基础。基于上述情况总结出的射频识别基本特性如下:
有序数据序列:原始的RFID读取数据是以时间点进行记录的,表现形式为r={EPC,ID,Ti},其中EPC为电子产品代码,ID为读写器ID,Ti为标签被检测获取数据的时间点。这些数据流记录了检测对象运动中所有信息的时间点。
不确定性数据:RFID观察到的数据是非常杂乱的,受到环境和标签与读写器距离的影响,RFID读取准确率往往无法达到100%,其中有些重要的数据都是不精确和不可靠的。
漏读数据:当被标记对象在一个读写器的检测范围内时,若读写器无法检测到标记对象则会出现漏读现象。在这种情况下,读写器误认为标签的对象是不存在的,导致射频识别数据的丢失。
误读数据:当标记的对象超出了读写器的检测范围时,可能会读取到一个不可识别的错误数据,这种被称为假阳性读数,对确定标签的实际位置影响很大,导致最终分析结果错误。
2 可追溯性清洗框架
基于上述分析出的RFID数据不确定问题,本文提出一种采用构建可追溯性框架来处理不确定数据的方法。
2.1整体框架模型
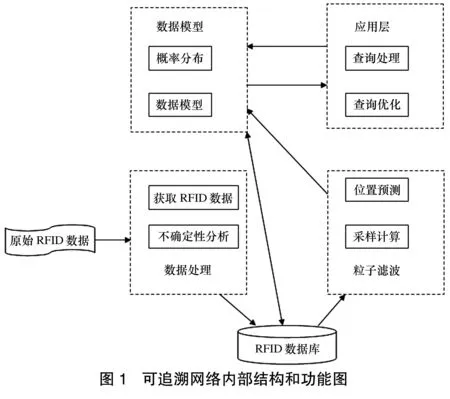
对于RFID在供应链中的追踪应用,本地应用程序管理主要包括数据处理、粒子滤波和数据模型。在应用程序中为了处理大量的原始射频识别数据,采用一个以采样为基础的推理技术——粒子滤波技术,它可以捕捉到不确定的原始射频识别数据,从动态和杂乱的原始数据中计算对象位置的概率分布情况。采样计算和位置预测后,使用一种新的模式数据模型生成射频识别的数据,一旦所有原始数据处理、建模和存储完成,高层次的追踪应用程序即可从数据库中提取事件,实现数据查询和挖掘。通过整个过程可以完成在可追溯网络中对各个节点的数据采集,如图1即可追溯网络内部结构和功能图。
2.2不确定数据概率模型
基于RFID技术的跟踪产品应用中获取的数据往往具有不确定和不可靠性,例如产品被盗、被伪造、损坏等。由于捕捉数据的不确定性,这里选取一个连续的随机变量来描述数据,使用概率密度函数f(x)进行描述随机变量。对于RFID读写去获取的不确定对象定义为变量x,它的位置信息应该遵循设定的概率密度函数f(x)。

得出在所有射频识别数据随机变量x下的条件密度函数为[5]:
其中hn=∫Γ(x)f(x)dx是标准化常数。在这种情况下,位置变量x=(x1,……,xk)由边缘验后密度函数计算而得[6]:
通过贝叶斯规则可计算出位置变量x,但随着无线射频识别数据的增加,计算时间复杂度几何倍数增长,这时可引入一个以采样为基础的粒子滤波技术降低时间复杂度。
2.3粒子滤波处理不确定数据
粒子滤波处理不确定数据的基本思想是使用一组有限的随机样本近似估算后验概率密度,这些随机样本被称为粒子。一个RFID的跟踪应用程序主要任务有两个:预测和更新。预测阶段是构建候选粒子集,更新阶段是构建合格的候选粒子集。粒子滤波技术可以有效地推断出观测数据的隐藏状态(例如对象的位置)。
预测更新阶段的具体算法描述如下:
输出:预测对象样本位置
步骤:
For∀xi∈xdo
样本xi位置+=运动轨迹;
样本xi位置=扩散率*随机数;
Endfor
测量概率p(样本xi位置);
递归值计算;
For∀xi∈xdo
xi测量概率p/=递归值;
计算xi的测量概率p;
Endfor
For∀xi∈xdo
R=随机数×给定系数;
如果第一次的p1>=r给G;
将G的值赋给xi;
Endfor
采样阶段算法描述如下:
If漏读检测对象数据
For∀xi∈xdo
搜索最近读数(xi);
将最近传感器位置信息与xi比较并赋值;
将xi于读写器距离赋值给d;
Endfor
Else
For∀xi∈xdo
计算(xi-读写器距离)并赋值给变量d;
Endfor
Endif
3 实验及数据分析
实验以评估捕捉到的不确定性原始射频识别数据采样为基础,从动态和低噪声的低级别射频识别数据中产生符合马尔科夫的概率分布模型。试验中采用ST070-016全无源RFID芯片,该芯片工作范围是860—960MHz,可适用于多种场合,系统主程序通过Java实现。实验主要目的是检验基于粒子滤波方法的准确性,使跟踪应用具有良好的精度。
实验环境设计为在一个仓库内,记录和处理无线射频识别数据流跟踪货物位置信息,初始原始射频识别读数不包括位置信息,针对漏读、误读等现象通过采用粒子滤波方法推断出真实数据信息。具体为模拟两个不确定数据:位置不准确和数据不准确。模拟位置不准确使用一个随机变量表示移动物体的运行轨迹,并在RFID数据接收上添加2个单位高斯白噪声标准差;模拟数据不准确将随机降低4%读写器的读取数据。先将时钟与数据接收系统时间同步,打开系统开始扫描对象标签,实验对象间隔均匀,设置每秒3个对象的扫描速度。将原始数据采集到系统中,进行系统分析、模型建立和查询处理。整个阶段所处理的数据以元组R={TR,DR,LRPR}形式存储在一张表中。通过Java编写的应用程序处理所有数据反馈结果。
实验中输入5组数据,每组100个数据记录,设定漏读率不同,每组数据运行5次取平均数,测试漏读数据对位置准确性的影响,最终实验结果如图2所示。

图2中的实验结果显示,随着漏读数的增加位置精确度逐渐下降。当漏读数目为0时,精确度接近100%;当70%的数据漏读时,位置估测的精确度也能达到75%左右。这表明本文中所提出算法具有良好的预测效果。
实验过程中,还测试了优化算法对运行时间的影响,图3给出的结果即为优化算法与传统算法运行时间的对比。从图中可以看出,当检测对象数达到200以后,优化算法的运行时间明显减缓,优化的算法可以减少接近总运行时间的一半,与未优化的算法相比,表现出卓越的时效性。
4 结语
在射频识别跟踪网络对象中管理不确定数据仍然是目前拓宽其应用的挑战。本文中,主要针对物联网中获取对象动态信息,特别是处理获取不确定的射频识别数据进行研究, 设计一个可追溯性清洗框架, 改进现有清洗射频识别原始数据技术,提出一个基于采样的推理技术即粒子滤波捕获原始射频识别不确定数据,计算从动态和杂乱底层RFID数据映射对象真实信息的概率分布,将RFID技术在无线传感器网络中的可追溯应用变得更加准确和高效。

[1]王霞,玄丽娟,夏秀峰.基于时序关系的RFID不确定数据清洗算法[J].辽宁大学学报,2012,39(2):174—177.
[2]王同磊,张进东.基于粒子滤波的RFID数据清洗方法研究[J].电子技术与软件工程,2014,(4).
[3]夏秀峰,玄丽娟,李晓明.分流机制下的RFID不确定数据清洗策略[J].计算机科学,2011,38(10A):22—24.
[4]崔红娟.基于粒子滤波的RFID事件概率计算方法研究[D].沈阳:辽宁大学,2012:58—79.
[5]王万良,顾熙仁,赵燕伟.一种基于动态标签的RFID不确定性数据清洗算法[J].计算机科学,2014,41(6A):383—386.
[6]王妍,宋宝燕,付菡,等.引入卡尔曼滤波的RFID数据清洗方法[J].小型微型计算机系统,2011,32(9):1 794—1 799.
[7]谷峪,于戈,李晓静,等.基于动态概率路径事件模型的RFID数据填补算法[J].软件学报,2010,21(3):438—451.
责任编辑:柴造坡
10.3969/j.issn.1674-6341.2016.04.014
2016-03-30
南楠(1981—),女,河南洛阳人,硕士,讲师。研究方向:计算机应用、自动化控制。
TP311
A
1674-6341(2016)04-0030-03
