线阵激光雷达同步扫描系统的设计
2016-08-18王元庆
沈 略,王元庆,徐 帆
(南京大学电子科学与工程学院,南京210046)
线阵激光雷达同步扫描系统的设计
沈略,王元庆*,徐帆
(南京大学电子科学与工程学院,南京210046)
为了实现线阵激光雷达的同步动态扫描,提出了一种对PIN光电二极管的输出基准信号进行电平转换驱动旋转平台,从而对三维景物实现推扫的实现方法。介绍了系统的硬件组成,设计了电平转换驱动电路,阐述了同步扫描系统的原理。实验表明,系统的结构紧凑,运行可靠,能在整个圆周范围内进行扫描,测量的精度高达0.000 312 5°/s。
激光雷达;同步扫描;PIN光电二极管;转台
三维成像激光雷达具有三维轮廓和成像能力,可获取目标的多种图像[1]。三维激光雷达的特点使其成为一种非常具有潜力的探测手段,适合于精确打击武器的避障、导航、制导和精确毁伤,目标的侦查、监视、分类和识别,航天器空间交会对接、着陆落点选择、对地遥感观测、地形测绘、灾害调查和植被测量,无人车和机器人的避障、导航,直升机、船舶和汽车的主动防撞以及城市建筑物三维地形等,在军民两大领域均具有广阔的发展前景和应用需求[2-3]。
三维成像激光雷达按扫描方式可分为单元探测器二维扫描,面阵探测器非凝视扫描和线阵探测器一维扫描[4]。单元探测器二维扫描激光成像雷达采用单元探测器接收,每次只能获得一个像素的距离和回波强度数据,通过二维光机扫描或一维光机扫描加推扫实现所有像素数据的采集,最终得到目标的距离像和强度像。目前,该成像探测成像技术已经较为成熟,但存在着成像速率低,体积功耗大的缺点。面阵探测器非扫描凝视激光成像雷达采用面阵探测器接收,无需扫描机构,可同时得到所有像素的距离和强度数据。该成像探测技术具有成像速率高,结构紧凑,体积小的优点,但受面阵探测器阵元大小及读出处理电路的限制,难以获得高分辨率或大视场的图像,且由于面阵探测器制造工艺水平限制,成像率较低,使得基于该探测技术的激光雷达成本高。
线阵探测器采用线阵探测器接收,每次可获得一行(列)像素的距离和回波强度数据,通过扫描系统推扫实现所有像素数据的采集适合运动平台和较大视场探测,其成像速率远高于单元探测器二维扫描成像技术,且由于线阵探测器产品丰富,阵元数目多,能获得较高分辨率图像,是一种颇具有优势和潜能的成像探测技术[5-7]。
该系统采取激光发射系统与回波接收系统光轴共轴的方式。激光由激光器出光以后,通过激光器整形单元准直,均衡和扩束,将其展开成线,扩束后的激光束通过镜头投射到远处1×N个被测点上,由接收镜头对回波激光进行成像,通过光传像阵列传输到N个光电探测器上,信号采集电路将阵列式光电探测器生成的回波信号进行采样和存储,得到N个被测点的像素飞行时间。为了满足国内机载遥感的需求,我们研制了同步扫描激光雷达系统。其中PIN光电二极管的TTL输出通过电平转换驱动电路板产生连续脉冲信号给移动转台,形成激光雷达实时的同步扫描。
收稿日期:2015-06-18修改日期:2015-07-23
1 系统原理介绍
激光器发射20 ns脉宽,重复频率2.8 k的高斯型激光脉冲通过400 μm内径光纤引一小束激光进入高速PIN光电二极管用于主波采样用来提供激光脉冲发射时刻信息,此时PIN光电二极管的输出一端为模拟输出,另外一端输出是标准的TTL电平。但是由于激光脉冲过窄,此时TTL的占空比极小,而且本身输出电流只是mA级别,无法直接接入驱动芯片SH2024A驱动移动转台,因此设计了电平转换驱动板将TTL电平加以脉宽扩展和带动负载能力的加强。具体硬件实现框图如图1所示。
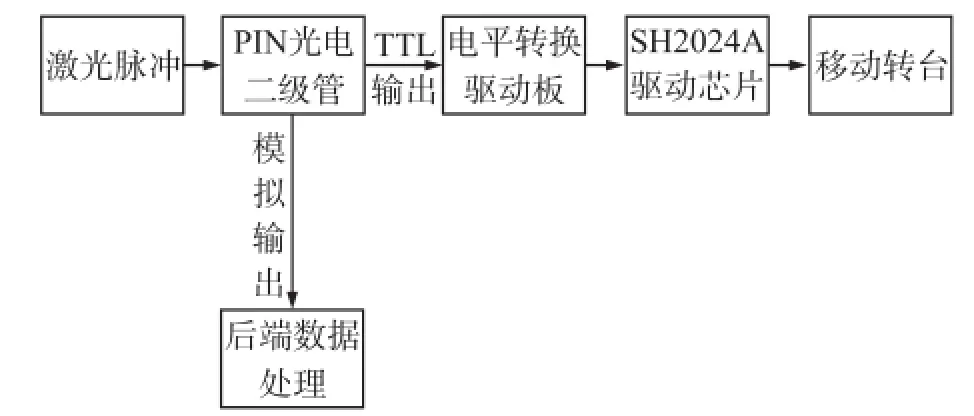
图1 同步扫描系统硬件框图
扫描系统有如下求:(a)保持TTL扩展脉冲到达移动转台的时间t1与PIN二级管的TTL输出时间t2之差t1-t2足够小;(b)扫描速度保持在1°/s以下,这是后端数据处理系统的要求;(c)重复定位精度在0.000 5°/s以下,并且越小越好,不然可能会造成回波数据点的偏移,当采集同一目标的回波数据时不能提供准确的比较;(d)中心最大负载大于80 kg,这是线阵激光雷达系统的自重。
2 PIN光电二极管的选择以及信号的提取
PIN光电二极管和雪崩光电二极管具有良好的灵敏度和响应特性,并且理论上光电探测器的灵敏度越高,对于后期数据处理以及主波的高斯信号采样越有利。而雪崩光电二极管由于工作在雪崩区,常常伴随有较大的静电流噪声[8]。而PIN光电二极管没有内部增益,从而信噪比比较高,因此在出光处采用PIN光电二极管作为光电探测器。在此选用EOT公司的ET-2030TTL,暗电流小于0.1 nA,上升和下降时间小于300 ps,带宽为1.2 GHz,同时具有模拟输出和TTL电平输出。
此处TTL输出采用阈值检测的办法。当模拟输出电平为阈值以上时,将其转换为逻辑高电平(大于3 V)。当模拟输出为阈值以下时,将其转换为逻辑低电平(小于0.5 V),如图2所示。其中,门限阈值可调。通过调低阈值即使在激光器出光较弱的条件下仍然可以得到标准的TTL波形。
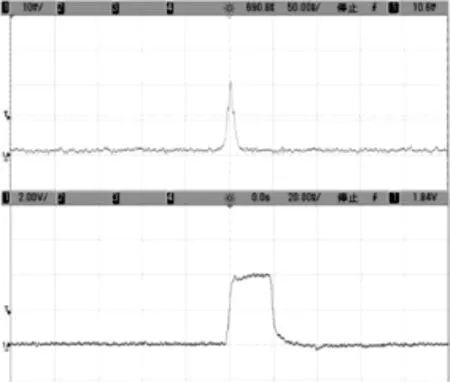
图2 PIN光电二极管模拟输出及TTL输出
3 电机及其驱动的选择
歩进电机又称为脉冲电动机,是数字控制系统中的一种执行元件[9]。对于一般的步进电机而言:(1)定于绕组的通电状态每改变一次,它的转子便转过一定的角度,即步进电机的步距角;(2)改变步进电机定子绕组的通电顺序,转子的旋转方向随之改变;(3)步进电机定子绕组通电状态的改变速度越快,其转组旋转的速度越快,即通电状态的变化频率越高,转子转速越高;(4)电机有其固有步进角,它表示控制系统每发一个步进脉冲信号电机所转动的角度,出厂时给出了一个步距角的值,这个步距角可以称为“电机固有步进角”,它不一定是电机工作时的真正步距角,真正的步距角和驱动器有关。
对于电机驱动来说,其功用是将脉冲电信号变为相应的角位移或者直线位移,即给一个脉冲电信号,电动机就转动一个固定的角度(前进一步)。步进电机转速v与脉冲频率f成正比,假设固定步进角为n:

并且通过方向信号,脱机信号以及步进脉冲信号来控制运转方向(正转以及反转)[10-11]。目前可以选用的电机有 HGRA1,电机驱动为配套的SH2024A。电机最大旋转角度为5°/C,重复定位精度为0.003°/C,满足实验要求。此时在电机驱动上设置最小步距角为0.000 312 5°,根据PIN光电二极管输出脉冲为2.8 kHz。由(1)容易计算得到转动速度为0.875°,满足后期数据处理的要求。实验时将线阵激光雷达系统箱体放置在移动转台上,通过转台圆周运动实现对物体的一个面阵的扫描。
4 电平转换驱动电路的设计
对于电机驱动SH2024A来说:(1)VCC是输入信号的公共端,当VCC大于5 V时需要外接限流电阻R,在本系统中,VCC由外接电源模块提供5 V电压;(2)CP是步进脉冲信号输入,下降沿有效,信号电平稳定时间不小于3 us,即要求高低电平具有一定的稳定时间;(3)FREE是脱机信号,当输入控制端为低时,电机处于自由脱机状态;(4)DIR是方向电平信号输入端,高低电平控制电机正转和反转。默认为高,因为同步扫描平台只要圆周正转,接入高电平。
由于PIN光电二极管输出波形是2.8 kHz,脉宽为20 ns的TTL电平,而驱动电路SH2024A需要下降沿有效,并且信号低电平稳定时间不小于3 μs的TTL电平来带动前段的发光二极管发光,通过光耦隔离带动后端的驱动电路。所以,电平转换驱动电路的要点实现电平的相互转换,使得PIN光电二极管在输出基准脉冲的同时带动旋转平台实现激光雷达的同步扫描,图3为电平转换驱动电路的外部交互。
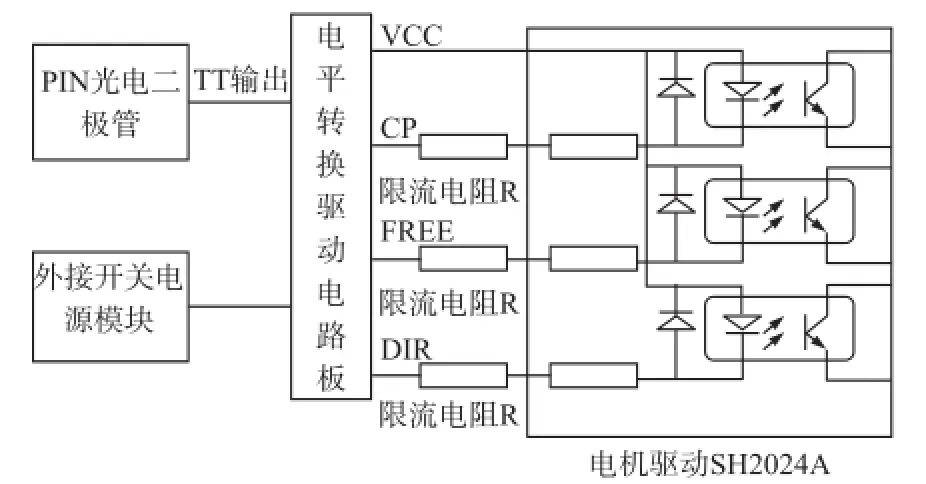
图3 电平转换驱动电路板的外部交互
具体实现步骤如图4所示:先将PIN管输出TTL电平通过高频信号线(SMA接头)接入反相器SN7400实现反向,再通过555定时器将脉宽20 ns展宽至5 μs,最后再通过反相器实现输出电平的反转。在输出端串联限流电阻,实现输出端8 mA~15 mA的前向电流的可调整。
测试电平转换驱动电路板(如图5所示),可以得到如图6的CP波形,通过测试移动转台在30 s内转过的角度确定转台能够保持在1°/s的稳定速度绕圆周旋转,图7为激光雷达同步扫描系统及其测试结果。
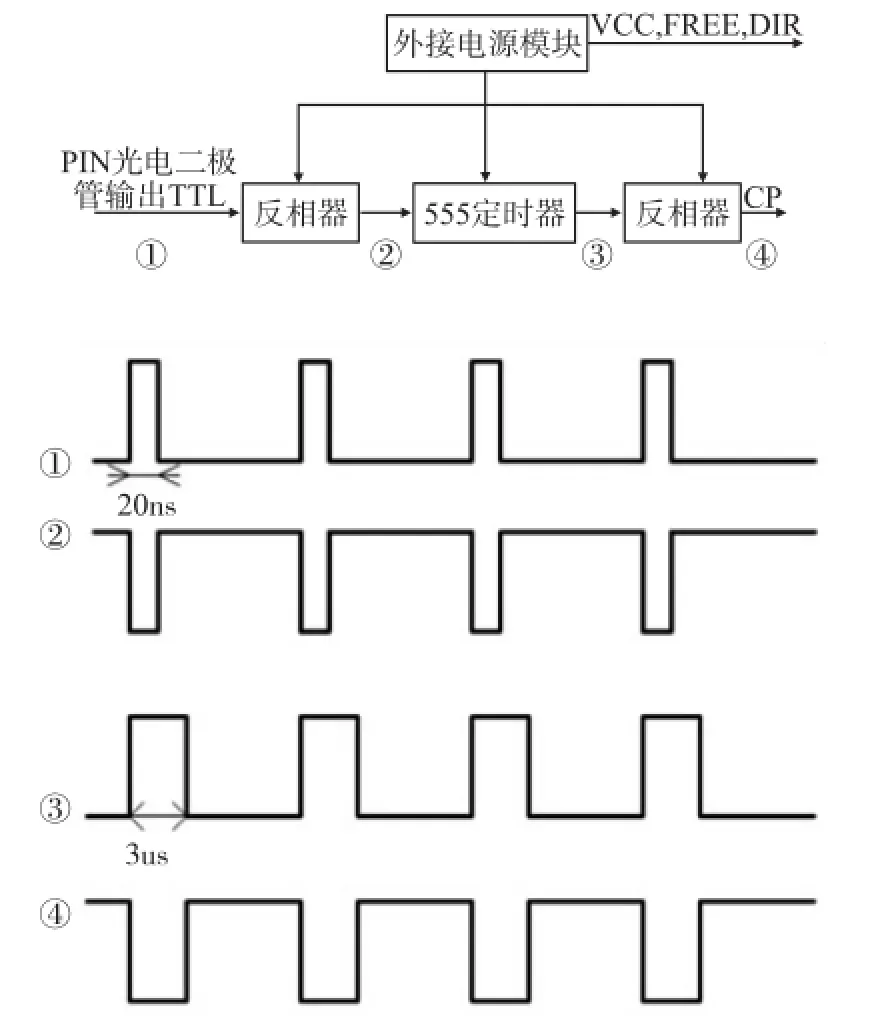
图4 电平转换驱动电路的硬件实现及各点波形
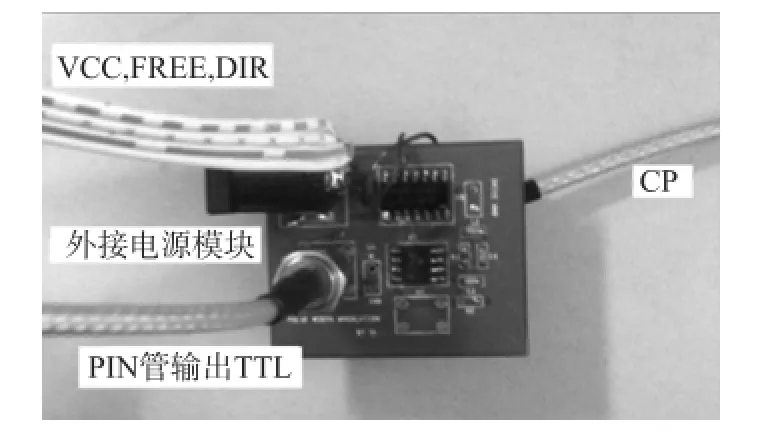
图5 电平转换驱动电路板
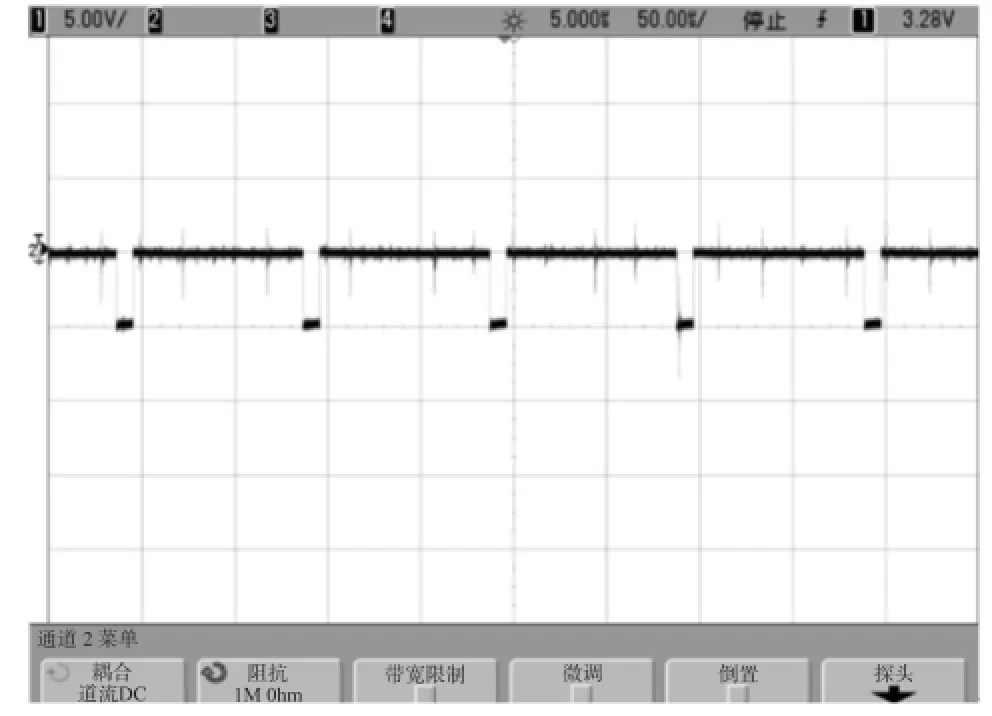
图6 输出CP信号

图7 激光雷达同步扫描系统及其测试
5 结束语
本文提出了一种通过PIN光电二极管输出的基准TTL电平带动移动转台的设计,完成电压转换驱动电路的设计并制版,按上述方案实现了线阵激光雷达的同步扫描系统,能够方便的实现激光脉冲与旋转平台的同步,系统能够稳定有效的工作。如果我们还需要控制移动转台运转的速度的相应变化,只需要在TTL输入端加入一个分频器或者计数器即可以完成移动转台速度的整数倍增减。
[1] 李番,邬双阳,郑永超,等.合成孔径激光雷达技术综述[J].红外与激光工程,2006,35(1):55-59.
[2] 许家玉.输电线路三维激光雷达测量技术的应用研究[J].科技视界,2013,25(10):265-265.
[3] 陈勇,韩晓言,侯国彦,等.激光雷达小型化及其在输电系统中的应用研究电力勘测设[J].2013(1):70-73.
[4] 孙志慧,邓甲昊,王昌.三维成像激光雷达线阵探测模式分析[J].激光与红外,2011,41(4):381-385.
[5] 周国清,周祥,张烈平,等.雪崩光电二极管线阵激光雷达多路飞行时间并行测量系统研究[J].科学技术与工程,2014,14 (22):62-67.
[6] McManamon P F.Review of Ladar:a Historic,Yet Emerging Sensor Technology with Rich Phenomenology[J].Optical Engineering,2012,51(6):1-13.
[7] Zhou G Q,Yang J Z,Li X,et al.Advances of Flash Lidar Development Onboard UAV[J].The XXII Congress of the International Society for Phontogrammetry and RemoteSensing,Volume XXXIX-B3,2012:193-198.
[8] 富容国,常本康,钱芸生,等.PIN光电二极管探测器响应特性测试[J].光学与光电技术,2007,5(1):11-13.
[9] 李国斌,廖家祥,江春青.高精度工作转台控制系统的设计与研发[J].装配制造,2009(6):159-162.
[10]王羲,董燕飞.步进电机转台的控制[J].微计算机信息,2005 (2):29-30.
[11]刘凤芹,张国玉,王凌云,等.基于单片机的两轴转台控制系统[J].长春理工大学学报(自然科学版),2008,31(4):87.
沈略(1990-),男,汉族,江苏苏州人,南京大学硕士生,研究方向为激光雷达的硬件控制,929945780@qq.com;
王元庆(1963-),男,汉族,安徽芜湖人,南京大学博导,教授,研究方向为立体图像显示、立体图像获取、现代数字图像处理、无侵扰人机交互,yqwang@nju.edu.cn。
Design of Laser-Synchronized Scanning System for Linear Array LiDAR
SHEN Lue,WANG Yuanqing*,XU Fan
(School of Electronic Science and Engineering,Nanjing University,Nanjing 210046,China)
Aiming at dynamic scanning for linear array LiDAR,a new method was proposed to scan 3D target in which signal from PIN diode was transformed to drive a turntable.Hardware involved in this system was introduced while level-translator circuit was designed.Besides,how the laser-synchronized system works was summarized.Experiment shows that it is compact and runs fluently in circle with an accuracy up to 0.000 312 5。
LiDAR;synchronous scanning;PIN diode;turntable
TM301.2
A
1005-9490(2016)03-0596-04
EEACC:6320C10.3969/j.issn.1005-9490.2016.03.019
