采用id=0的永磁同步电机矢量控制系统MATLAB/Simulink仿真
2016-08-17解小刚陈进
解小刚,陈进
(1.上海海事大学物流工程学院电气工程系,上海 201306;2.上海第二工业大学电子与电气工程学院,上海 201209)
采用id=0的永磁同步电机矢量控制系统MATLAB/Simulink仿真
解小刚1,陈进2
(1.上海海事大学物流工程学院电气工程系,上海 201306;2.上海第二工业大学电子与电气工程学院,上海 201209)
分析了永磁同步电机在三相静止坐标系和dq旋转坐标系下的数学模型,介绍了采用id=0的矢量控制结合速度/电流双闭环的永磁同步电机控制系统方案,详细推论了系统速度/电流双闭环调节器的参数设定,并在MATLAB/Simulink环境下搭建了永磁同步电机矢量控制系统的仿真模型,实验结果表明:采用id=0的永磁同步矢量控制系统具有较好的动态响应和速度控制性能。
永磁同步电机;矢量控制;双闭环调节器;Simulink
本文引用格式:解小刚,陈进.采用id=0的永磁同步电机矢量控制系统MATLAB/Simulink仿真[J]. 新型工业化,2016,6(5):47-54.
0 引言
随着现代电力电子技术、永磁材料、微电子技术、电机控制理论的快速发展,各种交流永磁同步电动机伺服系统成为交流伺服系统的主流。基于矢量控制的永磁同步电动机(PMSM)具有高功率密度、优良的控制性能和高功率等优点[1],被广泛应用在各种高性能伺服领域。本文研究了采用id=0的矢量控制结合速度/电流PID双闭环的永磁同步电机控制系统,并在Matlab/Simulink仿真环境下,对该系统进行仿真为实际系统的设计与实现提供了理论支持。
1 永磁同步电机的数学模型
永磁同步电机是一个非线性系统,并具有多变量,强耦合的特点。便于对其分析,作出如下假设:(1)忽略铁芯饱和现象,不计涡流和磁滞损耗;(2)忽略齿槽,换相过程和电枢反应等影响;(3)转子上无阻尼绕组,永磁体无阻尼作用;(4)永磁体产生的励磁磁场和三相绕组产生感应磁场均为正弦分布;(5)定子绕组电流在气隙中的只产生正弦分布的磁势,无高次谐波。
理论分析控制在工程误差范围内,所得结果与真实情况非常接近,以上假设对永磁同步电机的分析与控制可行,则永磁同步电动机在三相静止坐标系下的定子电压方程为:

式中,ua、ub、uc分别为abc三相电压,ia、ib、ic分别为abc三相电流,ψa、ψb、ψc分别为abc三相磁链,Rs为电枢电阻。三相静止坐标系下磁链方程为:

其中,Laa、Lbb、Lcc为各相绕组自感,且有Laa=Lbb=Lcc;Mab、Mac、Mba、Mbc、Mca、Mcb为绕组间的互感,且有Mab=Mac=Mba=Mbc=Mca=Mcb;ψf为转子永磁磁链,θ为转子磁极位置即转子N极与a相轴线的夹角。
以上为永磁同步电机在三相静止坐标系下的平衡方程。为了实现其数学模型的解耦,应转化为在dq旋转坐标系下的数学模型,便于分析永磁同步电机的稳态和动态性能。从三相静止坐标下的数学模型经过坐标变换得到其在dq坐标系下的数学模型如下。
电压方程:

其中,ud、uq为dq轴电压,id、iq为dq轴电流,Ld、Lq为dq轴电感,ψd、ψq为dq轴磁链。
磁链方程:

转矩方程:

运动方程:

从上式(5)可以看出,该电磁转矩有两个部分,第一项电磁转矩是由转子永磁体磁链和三相定子绕组磁链相互作用产生的,第二项则是由凸极效应造成磁阻变化而产生的反应转矩,它是凸极永磁同步电机(Ld≠Lq)特有的,对于隐极永磁同步电机(Ld=Lq)不会产生磁阻转矩,可以看出,因为转子磁链恒定不变,要调节PMSM的电磁转矩,只需调节定子交直轴电流分量(id、iq)。
2 永磁同步电机采用的控制策略分析
矢量控制的基本思想是在普通的三相交流电动机上设法模拟直流电动机转矩控制的规律,在磁场定向坐标上,将电流矢量分解成为产生磁通的励磁电流分量和产生转矩的转矩电流分量,并使得两个分量互相垂直,彼此独立,然后分别进行调节。完成了对定子电流的直轴(id)和交轴分量(iq)的解耦控制,使得PMSM具有优越的运行特性。
永磁同步电机的矢量控制原理框图如图1所示:

图1 永磁同步电机矢量控制结构框图Fig.1 The Structure Diagram of PMSM vector control
系统主要包括以下几个模块:永磁同步电机模块、速度/电流环模块、坐标变换模块、空间矢量脉宽调制(SVPWM)、逆变器模块、测量模块。整个控制过程为:速度指令ωref与检测到的转子速度信号ωe相比较,然后经过速度控制环的调节输出iqref指令信号,与反馈来的iq作差作为电流控制环的输入。而同时给定的idref为0,经坐标变换将id、iq转换为定子三相电流,再由PWM模块输出六路PWM波驱动逆变电路,产生可变频率和幅值的三相正弦电压来驱动电机运行。
3 永磁同步电机矢量控制系统PI调节器的设计
3.1电流内环调节器的设计
矢量控制的是定子电流,进而能控制电机的电磁转矩,如果电流环设计合理,可以达到减弱电压波动,动态的跟踪响应快,加速力矩大,控制系统运行稳定。

图2 电流环传递函数Fig.2 Current-loop transfer function
电流环的输入为电流信号的误差值,输出信号是参考电压,是对电机电磁方程的近似模型的模拟,忽略掉动态项ωψf和耦合项ωLdid,q轴的电磁方程可以写成:

那么电机的传递函数可以看成:

开关频率设为10KHz,可以把延时环节和PWM环节这样的小惯性环节合并处理,记延时时间常数为td=Ts,将KPWM看成1来处理可以得到:

忽略扰动,可以将电流环简化如图3所示:

图3 简化的电流环传递函数Fig.3 Simplification of current-loop transfer function
常用的PI调节传递函数为:


所以,电流环的闭合传递函数为:


两个传递函数对比可以得出:

二阶系统渐进稳定,特征根方程的根为复数,实数部分为负:

根据经典控制理论,系统的调整时间为:

式中,阻尼系数ξ决定系统的动态响应:0<ξ<1时系统表现为衰减的正弦阻尼振荡过程,逐步收敛趋于稳态;ξ≥1系统表现为指数收敛过程。PI调节器的理想阻尼系数一般视为0.6~0.8。并且可以得到PI调节器系数:

式中,R为电机电阻,Lq为电机电感参数,都是已知的,td为系统延时常数与系统运算周期相等,ξ为阻尼比系数可取0.6~0.8。
在电流环设计过程中,考虑电机参数和系统延时,设定阻尼比就可以确定PI控制参数,获得较好的动态性能。
3.2转速外环调节器的设计
转速外环[7]设计合理的话,可以减少扰动对系统的影响、减小转速波动,使得系统工作在稳定的状态。
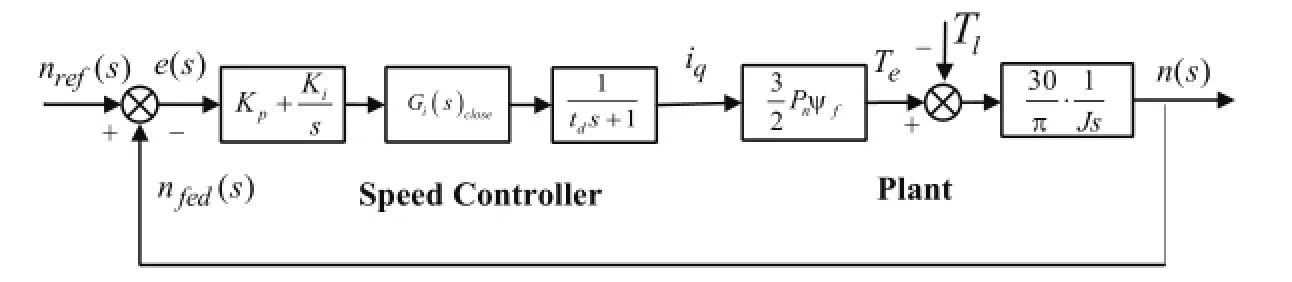
图4 转速外环传递函数Fig.4 Speed-loop transfer functions
研究转速外环的时候,将电流内环闭环传递函数简单视作一阶环节:


假设负载转矩Tl=0,转速外环变为:

图5 新的转速外环传递函数Fig.5 New speed-loop transfer function
此时,开环传递函数为:

如果积分环节参数Ki的值比较小,转速外环可以简化成标准的二阶系统传递函数:


对比标准的二阶系统闭环传递函数:

可以得到:

式中,J为转动惯量,Pn为极对数,ψf为永磁体磁链参数为已知常数,ξ为阻尼系数与电流内环相同,Ts2为延时环节时间常数,即为转速外环的釆样时间。
4 永磁同步电机矢量控制模型的建立及仿真结果
永磁同步电机矢量控制系统simulink仿真模型如下图所示。仿真中电机定子电阻R=8.2Ω,等效电感L=0.000835H,极对数为3,转子磁链ψf=0.175Wb,转动惯量J=1.87e-4kg·m2。

图6 PMSM矢量控制双闭环控制系统模型Fig.6 PMSM vector control system model with double closed-loop control
根据第三节PI调节器的设计,设定两个电流控制环的比例、积分系数分别为10、8,速度控制环的比例、积分系数为0.5、0.8。
实验(一),电机从 0 rpm 加速到 800rpm,并使电机以800rpm 转速稳态运行,此时的电机转速、电机定子三相电流、电机的转矩实验结果分别如下实验一所示。
实验(二),稳态运行时突加负载,电机在0.05s时突加负载,T=0.8N*M,稳态速度为800rpm,此时的电机转速、电机定子三相电流、电机的转矩实验结果分别如下实验二所示。
实验一,进行的是空载启动仿真实验,从结果波形可以看出,空载启动时间短,转速上升时间很快,定子相电流的正弦特性不是很明显,主要是因为在稳定状态时主要的负载转矩为粘性阻尼,而粘性阻尼的值是非常小的。由于增加了电流 PI 调节器和速度 PI 调节器作为双闭环,电机的动态响应是非常快的。
实验二,在0.05s处电机突加负载时,转速下降,然后因为PI调节器作用,转速很快恢复稳定,此时电阻电流增加,最终达到稳定状态,说明PI调节器具有很强的抗干扰能力。

(a)实验一,电机的转速(a)The speed of the motor from Experiment 1

(b)实验二,电机的转速(b)The speed of the motor from Experiment 2

(c)实验一,三相定子电流(c)Three-phase stator currents from Experiment 1

(d) 实验二,三相定子电流(d)Three-phase stator currents from Experiment 2

(e)实验一,电机的转矩(e)The torque of the motor from Experiment 1
(f)实验二,电机的转矩(f)The torque of the motor from Experiment 2
5 小结
本文在研究了永磁同步电机控制策略即采用id=0的矢量控制与经典的速度、电流构成的双闭环结合的控制策略,具体分析了PI调节器的参数设定,在MATLAB/Simulink的环境下,搭建了永磁同步电机矢量控制仿真模型,从仿真结果中可知,该永磁同步电机控制系统具有良好的动态性能,验证了本文采用id=0的矢量控制与经典的速度、电流构成的双闭环结合的永磁同步电动机的控制策略是可行有效。
仿真中很多模型都是理想化的,PI参数在理论推导设计值附近微调可以得到较好的效果,但实际系统中,由于电机参数的准确度问题,特别是转动惯量无法测得精确值的情况下,理论参数值只能作为一个参考。
[1] 袁登科,徐延东,李秀涛. 永磁同步电动机变频调速系统及其控制[M]. 北京:机械工业出版社,2015. D K Yuan,Y D Xu,X T Li. Variable frequency speed control of permanent magnet synchronous motor and its control [M]. Beijing:China Machine Press,2015.
[2] 陈进,许建凤,杨志兵.伺服电机的直接转矩控制[J].控制工程,2003,10(2):179-181. J Chen,J F Xu,Z B Yang. Direct torque control for servo motor [J]. Control engineering,2003,10(2):179-181.
[3] Liguo Q,Haibo H,Yourui H. Fractional order PID controller based on particle swarm optimization implemented with FPGA[C]. IEEE Computer Society:165-169.
[4] 洪乃刚. 电力电子电机控制系统仿真技术[M]. 北京:机械工业出版社,2013. N G Hong. Simulation of power electronic and electric machine control system technology [M]. Beijing:China Machine Press,2013.
[5] 陈强,吴根忠,叶雷. 永磁同步电机变负载自适应神经网络控制 [J]. 新型工业化,2014,4(4):17-22. Q Chen,G Z Wu. Adaptive Neural Control of Permanent Magnet Synchronous Motor with Variable Load[J].The Journal of New Industrialization,2014,4(4):17-22.
[6] 谢卫. 电力电子与交流传动系统仿真 [M]. 北京:机械工业出版社.2009. W Xie. Simulation of power electronics and AC drives [M]. Beijing:China Machine Press,2009.
[7] 谢少华,瞿遂春. 基于Matlab的无刷直流电机控制系统仿真研究 [J]. 新型工业化,2013(7):1-6. S H Xie,S C Qu. Simulink Study on Control System of Brushless DC Motor based on Matlab[J].The Journal of New Industrialization. 2015,5(3):28-34.
[8] 何亚屏,年晓红.永磁同步电机矢量控制MATLAB仿真研究[J].交流技术与电力牵引,2007,6(2):58-62. Y P He,X H Nian. Permanent magnet synchronous motor vector control simulation of MATLAB [J]. Communication technology and electric traction,2007,6(2):58-62.
[9] Li SH,Liu ZG. Adaptive Speed Control for Permanent-Magnet Syn-chronous Motor System With Variations of load Inertia [J]. IEEE Transactions on Industrial Electronics,2009,56(8):3050-3059.
[10] Chikh H K,et al. PMSM Vector Control Performance Improvement by Using Pulse with Modulation and Anti-Windup PI Controller. Proceedings of International Conference on Multimedia Computing and Systems,Chengdu,China,August 1-3,2011:1-7.
Vector Control With id=0 Simulation of PMSM Based on Matlab/Simulink
XIE Xiao-gang1, CHEN Jin2
(1.Department of Electrical Engineering, School of Logistics Engineering, Shanghai Maritime University, Shanghai 201306, China;2.School of Electronic and Electrical Engineering, Shanghai Second Polytechnic University, Shanghai 201209, China)
The paper analyse three-phase permanent magnet synchronous motor in stationary reference frame and mathematical model of DQ coordinates . And introduces the use of vector control system of permanent magnet synchronous speed/ current double closed-loop control system. Detailed reasoning a system of double closed loop speed/current parameter setting .And built simulation model of a permanent magnet synchronous motor vector control system based on MATLAB/Simulink and analysing the results. It shows that the vector control system of permanent magnet synchronous has good dynamic response and speed of performance.
PMSM; Vector control;Double -closed loop ;Simulink
10.19335/j.cnki.2095-6649.2016.05.008
XIE Xiao-gang, CHEN Jin. Vector Control With id=0 Simulation of PMSM Based on Matlab/Simulink[J]. The Journal of New Industrialization, 2016, 6(5): 47-54.
解小刚(1991-),男,硕士研究生,研究方向为嵌入式硬件设计、交流伺服控制系统;陈进(1964-),男,教授,主要研究方向为电子废弃物资源化过程控制、材料生产过程控制
