基于无速度传感器的地铁永磁牵引电机SVPWM控制仿真
2016-08-17宋层王欣龚晓妍
宋层,王欣,龚晓妍
(湖南工业大学电气与信息工程学院,湖南株洲 412000)
基于无速度传感器的地铁永磁牵引电机SVPWM控制仿真
宋层,王欣,龚晓妍
(湖南工业大学电气与信息工程学院,湖南株洲 412000)
由于城市地铁的发展,具有体积小,牵引性能良好等优势的永磁电机正在逐步应用于轨道交通的牵引系统。针对直接对电机参数实测需要安装传感器或者估算精度的问题,将利用滑模变结构控制理论的滑模观测方法,实现对基于矢量控制的地铁永磁牵引电机的进一步优化,减少了传统中装传感器进行测量的麻烦,节约了成本。利用仿真,对滑模观测器的性能进行验证。结果表明:滑模观测器在地铁的永磁牵引仿真系统中有很好的鲁棒性,而且跟随效果良好。
地铁;永磁电机;矢量控制;滑模观测器;仿真
本文引用格式:宋层,王欣,龚晓妍.基于无速度传感器的地铁永磁牵引电机SVPWM控制仿真[J]. 新型工业化,2016,6(5):26-32.
0 引言
地铁是舒缓城市日益增长的交通压力的重要交通方式,而且具有速度快、运量大、能耗低、污染少、占地省和安全环保等优点[1]。而牵引系统作为整个地铁系统中的重要组成部分,它的发展直接影响着地铁的未来应用[2]。随着永磁同步电机(permanent magnet synchronous motor,PMSM)的发展,它的诸多优势正在被人们逐渐认识,永磁电机其转子中间对变速齿轮箱、主轴和联轴器的要求远小于异步电机,提升电机的传动效率,最重要的是使变速运行范围更宽,运行可靠性更高。
传统的电机控制采用安装传感器的方法,这使电机的体积增大、安装成本升高、维护维修麻文献[3]提出了模型参考自适应法,能够快速跟踪速度变化;文献[4]提出了状态观测器估算法,降低参数不法等隶属于人工智能估算法的方法。但是滑模转速估计法与其他几种方法相比,具有速度响应快,强鲁棒性,对系统而言,无论内部参数还是外部干扰都呈现不变性,系统渐进稳定就可以获得保证[5]。
1 基于无速度传感器的地铁牵引系统工作原理
基于无速度传感器的地铁牵引系统系统仿真框图如图1所示。该系统主要包括提供供电电压的35KV的中压网;将中压网转变成地铁直流牵引网供电电压的24脉波整流器;永磁牵引电机的控制系统。
根据地铁牵引供电方式、永磁电机作为牵引动力的控制建模针对地铁系统提出了新型的利用永磁电机牵引方案,在列车再生制动时会引起牵引网的电压升高,机车产生的制动能量。
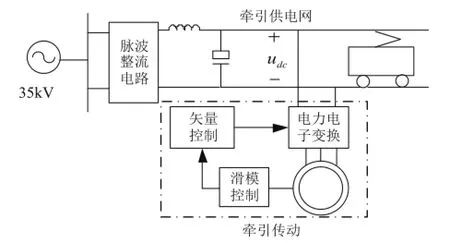
图1 系统框图Fig.1 Block diagram of control system
1.1永磁电机矢量控制原理
对于任何牵引电机来说,其拖动系统都遵循基本的运动方程式[6-7]:

式中:GD2是飞轮力矩;N为电机转速;Te为电磁转矩;TL为负载转矩。
将永磁电机三相转化为d-q坐标系下的模型,其定子电压方程:

定子磁链方程:

电磁转矩方程:

其中,ud、uq为d-q坐标系下的等效定子电压;id、iq为d-q坐标系下的等效定子电流;Ld、Lq为定子绕组d、q轴电感分量;Rs为电枢电阻;ψf为转子磁链;ωe为电角速度。
对于外贴式转子结构的永磁电机,由于稀土永磁材料的相对回复磁导率接近于1,所以在电磁性能上属于隐极转子结构,即Ld=Lq,故在d-q轴系永磁同步电动机的电磁转矩是由 iq决定的,要想控制电磁转矩,只要控制iq的大小并保持ψf为定值,采用 id= 0控制策略[7]。
1.2滑模控制建模
设系统方程为

在此状态空间里,存在一个称为滑模切换面,其表达式为:


图2 状态空间划分模拟图Fig.2 Simulation diagram of state space partition
根据滑模面的定义,可将设立的状态空间分为两部分,即S>0和S<0。
在滑模面上,研究的范围是最终停留在滑模面具有滑模运动的点[8],保证系统运行最终达到稳定状态,最终抵达滑模面的表达式为:

首先,确定切换矢量S(x),据此建立滑模控制器:

保证在滑模面的动模态区域中系统稳定性。

由上式可知,若反电动势的确定以后,就可根据反电动势这一正弦波获得所需要的转子位置信息,因此,设计滑模观测器获得转子位置信号就转化为怎么样获得反电动势,这是滑模观测器设计的基本依据[9]。
已知符号函-数:

据两相静止坐标系下的模型,设计滑模观测器模型:

iα,iβ——为实际测量值;
取李雅普诺夫函数:

根据李雅普诺夫稳定性条件,令:

则滑模观测器的动态模型:

把公式(1-15)代入(1-14)得到:

则可得到:

进入滑模面后,则根据滑模面公式可到滑模观测器动态方程:

从滑模电流观测器获得反电势,此电势为高频开关信号,而反电势的连续信息获取,需通过一阶低通滤波[10]:

根据式(1-19)电势与转子位置角的关系估算电机转子位置角度为:

滤波后,反电势势必存在相位延迟现象,延迟角大小也和电机运行频率有着密切关系,因此准确估算转子位置角度值,需对转角进行估算补偿,减少滑模控制带来的抖振现象[11]。补偿角的大小见式(1-21):

则可得到转子估算位置为:

根据以上推导,滑模观测器的原理框图如图3:

图3 滑模观测器框图Fig.3 Block diagram of sliding mode observer
2 系统仿真与分析
地铁车辆在运行过程中一般分为启动运行——惰性行驶——刹车制动三个过程。首先对整体仿真时间进行设置,仿真总时间鉴仿真软件的限制,将总的仿真时间设置为2s,对加速度也做出相应的调整。假设机车开始起动的时间为0s,当机车由0km/h加速至平均运行速度36km/h;列车惰性运行0.3s后,在1s的时间点转换为刹车运行工况。

图4 基于滑模观测器的地铁牵引控制仿真框图Fig.4 Block diagram of Metro traction control based on sliding mode observer
列车运行速度曲线的测量值和观测值如图5所示,仿真在2s内完成了列车的整体运行工况的模拟。

图5 电机转速曲线Fig.5 Curve of motor speed
从图中可以看出,从滑模观测器得出的电机转速的观测值基本上可以跟踪上仿真模型中测量的电机转速,其大小基本上相等,具有速度响应快,动态性能好的特点。
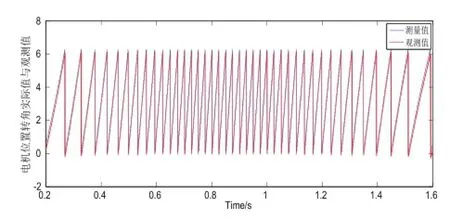
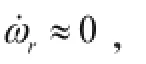
图6 电机转子位置角的实际值与观测值Fig.6 The actual value and the observed value of the rotor position angle of the motor

图7 转子实际位置角值与观测值之差Fig.7 The difference between the actual position angle and the observed value of the rotor
图6~7可以看出,转子位置角的观测值与实际值起步时有较小误差,0.2s后恢复稳态,误差基本为0。通过采用滑模观测器可以实现转子位置角的测量。

图8 id/iq电流波形Fig.8 Waveform of current id/iq

图9 永磁电机的电磁转矩波形Fig.9 Electromagnetic torque waveform of PMSM
永磁牵引电机的从牵引到刹车制动的过程,id始终为0,满足了本文采用的id=0 的控制策略。电磁转矩的波形表明当列车启动阶段,永磁牵引电机的电磁转矩为正,保持在1000N.m附近,在进入惰性运行时,电机的电磁转矩减小,进入刹车状态时,由正转负,表明永磁牵引电机已经由电动机转而变成了产生电能的发电机。
图10 永磁电机三相定子电流波形Fig.10 Three phase stator current waveform of permanent magnet motor
在模拟列车完整运行的过程中,电机在启动时,电机消耗电能定子电流较大,进入惰性状态后明显减小,刹车过程中,电机由电动牵引状态进入发电机状态,开始输出电能使得电机三相定子电流又一次增大,相位也发生了变化,如图10所示。
列车运行消耗的功率波形图11表明列车在永磁电机牵引时段,电机不断消耗功率,进入惰性运行阶段后,消耗的功率明显减少,进入刹车运行阶段,电机转变为发电状态,也就是电机消耗的功率为负值,牵引网电压立即升高。
3 总结

图11 列车运行消耗功率波形Fig.11 Consumed power waveform of train running

图12 牵引网电压波形Fig.12 The voltage waveform of traction network
本文将永磁电机引入地铁系统,作为牵引动力。通过搭建仿真模型,对电机的定子电流和消耗功率进行了分析。利用滑模观测器对电机的位置转角和速度进行观测,并将测量值和滑模观测器的观测值进行了仿真验证,得出结论:滑模观测器的速度观测值可以跟随电机的实际测量值的变化,位置转角的观测值和实际测量也基本吻合,验证了基于滑模观测器的地铁永磁电机牵引系统的可行性。
[1] 徐安.城市轨道交通电力牵引[M].北京:中国铁道出版社, 2007. Xu An. Electric traction of Urban Rail Transit [M].Beijing: China Railway Publishing House,2007.
[2] 黄书荣,徐伟,胡冬.轨道交通用直线感应电机发展状况综述[J].新型工业化,2015,5(1):15-21. HUANG Shurong,XU Wei,HU Dong. Survey on the Development of Linear Induction Motor Based on Railway Transportation [J]. The Journal of New Industrialization, 2015, 5(1):15-21.
[3] Tatematsu K, Hamada D, Uchida K. Sensorless control for permanent magnet Synchronous motor with reduced order observer [J]. IEEE Transaction on Industrial Electronics,1996, 43(4): 492-497.
[4] 柏建勇,刘雨佳. 基于MRAS观测器的PMSM无速度传感器模型预测电流控制[J]. 新型工业化,2015,5(9): 52-58. BAI Jian-yong;LIU Yu-jia. Sensorless Model Predictive Current Control Based on MRAS Observer for PMSM Drives[J]. The Journal of New Industrialization, 2015, 5(9): 52-58.
[5] 李永东,曾毅,谭卓辉. 基于降阶观测器的定子磁链观测和速度辨识[J]. 电工技术学报,2004.19(7): 70-76. Li Yongdong, Zeng Yi, Tan Zhuohui. Stator Flux Observation and Speed Identification Based on Reduced Order Observer[J].Transactions of China electro-technical society, 2004,19(7): 70-76.
[6] Van Der Broeck H W,Skudelny H C,Stanke G V. Analysis and realization of a pulse width modulator based on voltage space vectors[J]. IEEE Transactions on Industry Applications,1988.
[7] Khanbadkone Ashwin M, Holtz Joachim. Compensated synchronous PI current controller in over modulation range and six-step operation of space-vector-modulation-based vector-controlled drives[J]. IEEE Trans on Industrial Electronic, 2002.
[8] Jones L A, Lang J H. A state observer for permanent magnet synchronous motors [J]. IEEE Transaction on Industrial Electronics, 1989, 36 (3):374-382.
[9] 丁硕,崔总泽,巫庆辉. 基于SVPWM的永磁同步电机矢量控制仿真研究[J]. 国外电子测量技术,2014,06:81-85. Ding Shuo, Cui Zongze, Wu Qinghui. The Simulation of Vector Control System of PMSM Based on SVPWM [J]. Foreign Electronic Measurement Technology, 2014, 06:81-85.
[10] Kim, Hongryel,Son, Jubum,Lee, Jangmyung. A high-speed sliding-mode observer for the sensorless speed control of a PMSM[J]. IEEE Transactions on Industrial Electronics, 2011.
[11] 高晗璎,王哲修. 基于滑模观测器的永磁同步电动机无位置传感器技术的研究[J]. 伺服控制,2011,05:24-27. Gao Hanying, Wang Zhexiu. Study of Position Sensorless Control for Permanent Magnet Synchronous Motor Based on Sliding Mode Observer[J].Servo Control, 2011,05:24-27.
SVPWM Control Simulation of Subway PMSM Traction System Based on Speed Sensorless
SONG Ceng, WANG Xin, GONG Xiao-yan
(School of Electrical and Information Engineering , Hunan University of Technology, Zhuzhou, 412000 , China)
Due to the development of the city subway, magnet motor with small size, good traction performance and other advantages is gradually applied to rail traction system. For installing sensors to measure the motor parameters and estimation accuracy, the sliding mode observation method based on the corresponding theory is used to achieve further optimization of vector control of subway traction permanent magnet traction motor(PMSG) from subway, and reduce the trouble of installing the sensors. Through simulation, the performance of the sliding mode observer is verified. The results show that: sliding mode observer has good robustness in subway PMSM traction simulation system.
Subway; PMSM; SVPWM; Sliding Mode Observer; Simulation
10.19335/j.cnki.2095-6649.2016.05.005
SONG Ceng, WANG Xin, GONG Xiao-yan. SVPWM Control Simulation of Subway PMSM Traction System Based on Speed Sensorless[J]. The Journal of New Industrialization, 2016, 6(5): 26-32.
湖南省研究生科研创新项目(CX2015B564)
宋层(1989-),女,硕士研究生,主要研究方向:复杂电气系统的信息集成与协调控制;王欣(1971-),女,硕士生导师,教授,主要研究方向:复杂机电系统的建模与优化控制;龚晓妍(1988-),女,硕士研究生,主要研究方向:复杂电气系统的信息集成与协调控制
