船舶尾流气泡幕探测技术进展与应用
2016-08-17郭露萍翟雨生王琦龙齐志央
郭露萍,翟雨生,王琦龙,齐志央
(东南大学 电子科学与工程学院,江苏 南京 210096)
研究综述
船舶尾流气泡幕探测技术进展与应用
郭露萍,翟雨生,王琦龙,齐志央
(东南大学 电子科学与工程学院,江苏 南京 210096)
本文介绍并比较船舶尾流气泡幕的声学探测和光学探测的异同。以检测参量为主线,讨论光学探测中气泡对散射光强度、频率和偏振特性的影响,重点阐述基于脉冲回波、激光拉曼散射和光学成像等探测方式的应用原理、发展状况和存在的问题。以提高回波信号信噪比为目的,提出一种基于表面等离子激元的气泡尾流探测新思路,并进行相关模拟论证。气泡尾流光学探测法及其应用系统具有实时性好、灵敏度高、探测区域广等优点,在船舶监控、海洋水体污染检测和海洋生物环境监测等方面应用广泛。
尾流探测;气泡;光学散射
0 引 言
水下航行器在航行过程中由于螺旋桨的空化,海面波浪的破碎以及吃水线附近空气的卷入会形成含有大量气泡尤其是微气泡的尾流场,尾流场的几何尺寸要比航行体本身大 2 倍以上(见图 1)[1]。尾流中的气泡在形成后的较短时间内,经由大气泡的上升、破裂,小气泡的融合,尺度为 10 ~ 300 μm 的气泡含量最多,当气泡运动进入远程尾流发展区时,尾流中剩下的气泡半径大都为 10 ~ 50 μm 的微小气泡,且气泡之间的平均距离要远大于气泡的半径[1],由此可见气泡尾流具有不可避免、存活时间长、难以模仿等特点。由于气泡的密度、压缩率等参数与海水的明显不同以及尾流中湍流的影响,使得尾流中的气泡分布不均匀,这就导致了声波、光波等在尾流中的传输特性与在海水中的传输存在着明显的差异,为水下航行器的探测和搜索提供了依据。鉴于气泡尾流探测的重大军事意义,自二战起,国外就开始气泡尾流检测相关方面的理论和实验研究,并取得了一系列研究成果。本文从气泡尾流的声学特性和光学特性出发,综述气泡尾流的不同探测方法,并分析其蕴含的应用价值与广阔前景。
1 气泡尾流的声学探测
气泡尾流声学探测方法的基本原理是气泡的声散射和声吸收效应。声波在水中的衰减较小,可传播距离远,基于这些优势气泡尾流声学探测发展较早,可追溯到二战时期,技术也相对成熟,其中气泡尾流声自导技术早已广泛应用于鱼雷制导中。尾流声自导分为主动和被动 2 种工作方式,其中主动式尾流声自导是由自导发射机发射高频声脉冲经尾流不同水层中气泡的散射,使散射信号强度发生明显变化,信号接收机接收散射信号后经信号分析识别尾流,这种方法的探测距离远,发现目标能力强,但同时也容易暴露自己。被动式尾流声自导是利用尾流区海水与正常海水声阻抗的显著差别通过检测海水声阻抗值的变化来确认尾流存在与否,此方法精度不如主动声呐,但能在隐蔽自己的情况下发现目标。
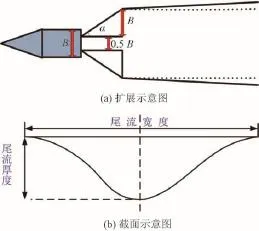
图 1 舰船尾流示意图Fig. 1 The Schematic of ship wake
声呐在水下的探测距离虽然远,但是受外界条件的影响很大,比较直接的因素有多路径效应、混响干扰、海洋噪声、自噪声、目标反射特征或辐射噪声强度等,它们大多与海洋环境因素有关[2]。如声波在传播途中受海水介质不均匀分布和海面、海底的影响和制约,会产生折射、散射、反射和干涉,会产生声线弯曲、信号起伏和畸变,造成传播途径的改变,以及出现声阴区,严重影响声呐的作用距离和测量精度。因此研究者们急切的想摸索出其他更有效的尾流探测方式。
2 气泡尾流的光学探测
光波的波长短,传播速度快,对气泡的敏感度强于声波,方向性好,抗干扰能力强。随着激光技术的发展,20 世纪末就开始了尾流光学探测方面的研究。气泡尾流的光学探测原理与声学相似,只是探测的信号源是光波。尾流光学探测所用的光源一般是在水中衰减较小的蓝绿激光。依据光源和探测器位置的不同,尾流光学探测的模式可以分为前向探测和后向探测,其中前向散射强度要大于后向散射,然而前向探测方式的光源和探测器是分离的,而后向探测的光源和探测器位于同一探测平台,根据实际应用的需求,后向探测方式一直是研究的重点,具体的探测系统结构如图 2 所示。
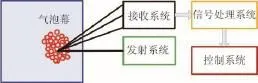
图 2 光学探测系统结构示意图Fig. 2 The schematic diagram of optical detection system
与声相比,散射光的物理特性具有多样性,因此,根据具体检测参量的不一样,尾流光学探测又分为以下几种方法:
1)散射光强度探测
光强度探测与传统声学探测本质上的区别就在于探测信号改变为光信号,而光与气泡的相互作用,可由Mie散射理论进行分析。强度探测是在声学探测的基础上发展起来的,文献[3]对散射光强度探测的相关研究做了详细的总结。受水体自身散射干扰以及后向散射光信噪比低等问题的影响,强度探测很难区分气泡尾流与浑浊水体,且探测距离较短。
2)散射光频率探测
根据激光多普勒效应,运动气泡与激光相互作用会造成散射光的频移,频移的大小与气泡的运动速率成正比,尾流气泡的运动速率要远小于光速,相应的多普勒频移也要比光频小很多,相差约 7 ~ 8 个数量级[4],可用光学外差法来提高检测分辨率,实验中常使用的光路有参考型和差动型,差动型因其不受视场限制,收集散射光信号的能力远大于前者而得到广泛应用。王赟和刘继芳等[5]利用差动型激光多普勒探测方法,对气泡数密度和速率分布与后向散射光信号幅度和截止频率之间的关系进行研究,发现随着气泡数密度和速率分布范围的增大,后向散射光信号的多普勒频移谱的幅度、截止频移也随之增大。朱东华和张晓晖[6]用双光路差动型舰船尾流探测模型对鱼雷与尾流的相对速度引起的差频大小进行模拟,模拟结果表明安放在运动平台上的探测器,多普勒频移量将会更明显,为激光多普勒效应应用于气泡尾流光自导技术提供了理论依据。和强度探测相比,频率探测具有更强的抗干扰能力,探测距离更远,精度更高。
3)散射光偏振特性探测
微小气泡与固体微粒对入射光散射后偏振状态的影响在粒径域和散射角度上具有选择性,且气泡的退偏振效应要比固体粒子强,偏振特性探测就是基于尾流气泡群对偏振激光的退偏振效应来实现的,可有效区分气泡与其他粒子,提高了气泡的探测精度。Mie散射理论仍然是光尾流偏振特性研究的基础。王燕等[7]对不同粒径大小的单个尾流气泡的退偏效应进行研究,考虑到光束在气泡尾流中传输时会发生复散射现象,秦刚和杨郁等[8]用蒙特卡洛模型对不同偏振态入射光经过气泡尾流时的偏振特性进行了模拟分析,结果表明气泡群的存在会加快入射光的退偏。同时,为透彻解析气泡尾流对入射激光的偏振特性影响,还对气泡粒径大小、气泡尾流散射系数和气泡幕厚度等因素对散射光偏振特性的影响进行了研究。王江安和王善勇等[9]研究了气泡尾流的多重散射对偏振特性的影响。偏振特性探测目前能确定的只是偏振度的变化,还很难确定尾流的位置信息,它们之间的具体换算关系还需进一步深入研究。
4)脉冲回波探测
脉冲回波探测是在雷达探测的基础上引伸而来的,它是水下尾流激光雷达的核心技术。易媛媛等[10]利用自行设计的实验系统研究了激光功率、气泡位置、视场和气泡区厚度等因素对后向散射信号的影响,且对模拟尾流的激光脉冲后向散射信号进行了实验测量。韩彪等[11-12]分析了激光脉冲宽度对气泡尾流散射回波信号的影响,并对模拟气泡尾流回波信号的前沿位置、后沿位置、时域宽度、能量、峰值大小和位置等参数进行了统计分析,在此基础上提出了基于激光脉冲后向散射信号特征变化的舰船尾流气泡后向检测方法。郑毅等[13]对脉冲能量与水下激光雷达性能的关系进行了研究。经过对水下激光雷达技术的不断深入研究,王江安等[15]成功设计出了用于尾流检测的激光雷达样机。文献[11, 13]表明激光脉冲宽度和脉冲能量的有效设置能提高气泡尾流的探测精度,图 3 为脉冲能量与脉冲宽度大小对回波信号的影响。
由此可见脉冲宽度越窄,越有利于将回波信号从后向散射信号中提取出来,且在一定范围内,脉冲能量越高,越有助于对气泡尾流的探测,但脉冲能量不能大于一定阈值,否则会由于水体后向散射光的影响,导致目标有效回波信号的波动[13]。因此在水下激光雷达设计中可以考虑使用具有一定能量的超短激光脉冲(如飞秒激光)光源对气泡尾流进行探测,可有效提高探测精度。
5)激光拉曼散射探测
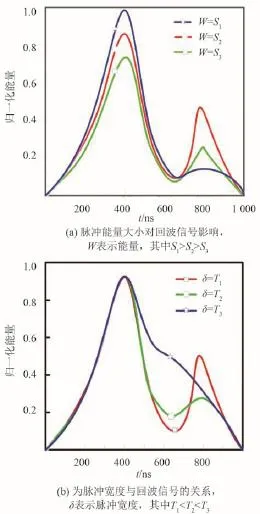
图 3 第 1 个波峰是水体散射信号,第 2 个波峰是气泡尾流散射信Fig. 3 The first wave was because of water scattering,the second wave was the echo signal of bubbles wake.
激光通过被探测水域,发生的散射信号中除了有瑞利散射和米散射等弹性散射外还有拉曼散射信号,由于拉曼散射信号强度要比弹性散射小 4 ~ 5 个数量级,信号太弱以至于大部分的研究都把这部分散射信号忽略不计。Bunkin AF 和 Klinkov VK 等[15]经过对尾流区的拉曼散射信号进行分析后发现可以利用水体的拉曼散射信号来实现气泡尾流探测,文献[15]指出海洋中水分子的拉曼散射信号在很远的距离也很容易被探测到,而拉曼散射信号与传播媒介的分子数成正比,即任何破坏水的连续性的物质(气泡、悬浮颗粒、泡沫)都会减少激光路径上的水分子数,且根据拉曼散射的物理规律,拉曼散射对小气泡的灵敏度明显要高于MIE 散射。利用拉曼激光雷达和弹性散射激光雷达同时对舰船产生的尾流进行测量,发现气泡尾流的存在会使水的拉曼散射回波信号减弱,且拉曼散射呈现了更长更缓慢的时间演变规律,对小气泡的灵敏度要高于弹性散射。因此有望利用拉曼散射实现气泡尾流的远距离、高精度、长时间探测。尾流的拉曼散射与弹性散射回波信号随时间的演变关系如图 4 所示。
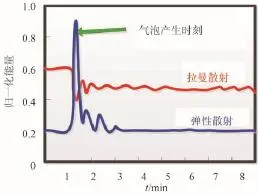
图 4 尾流的拉曼散射与弹性散射回波信号随时间的演变关系,箭头指向为气泡尾流产生的瞬间时刻,图中的弹性散射信号经 10–n因子衰减处理[15]。Fig. 4 The evolution of raman scattered and elastic scattering ofbubbles echo signal with time,arrow pointing to the moment of bubbles generate,the elastic scattering signal in the graph was attenuated by a factor of 10–nby filter[15].
拉曼散射信号还携带了水体所含物质分子结构方面的更多具体信息,不同物质的拉曼散射光信号与入射光存在一个特定的频移量,利用这一点可对海洋上层水域进行远场遥感探测,这是一种新颖有效的气泡尾流探测方法,具有广阔发展前景。
6)光学成像探测
光学成像法主要是用照相与图像处理相结合的方法,对不同尾流条件下获取的图像进行特征提取,并根据这些特征的变化进行尾流检测的光学方法。它分为光学摄影和全息成像。
光学摄影法是直接利用摄像设备拍摄尾流图像,结合数字图像处理技术实时提取尾流图像的统计特征参数。此方法能真实再现水底情况,直观精确,且能通过图象处理和信号处理手段来剔除藻类颗粒等其他非气泡浮游物质的干扰。刘西站等[16]设计的水下气泡尾流成像系统可实现对大动态范围(10 ~ 500 μm)粒径小气泡的成像。水下摄影技术虽能成功捕捉到气泡尾流图象,但是探测得到的是二维图形,只能由拍摄物质的形状和大小来区别气泡与其他物质,很难区分球形粒子与气泡。
全息成像是利用干涉和衍射原理记录并再现物体真实的三维图像记录和再现技术,鉴于全息术的三维成像,可得到透明气泡或其他微粒的三维图像,从而有利于气泡和其他微粒的识别和统计。袁军行和陈良益[17]设计的光学尾流全息成像系统可准确得到尾流场不同层次的气泡信息,经算法分析可得到气泡粒径大小和气泡的速度信息。韩正英和于佳等[18]还将数字全息技术应用于气泡尾流探测研究中,经实验得到整个三维场的立体分布图和不同截面的二维分布图。不过全息成像法的成像质量受限于实验记录系统的发展。
7)气泡尾流探测新思路
气泡尾流探测研究的关键是实现远场尾流即低密度微小气泡的探测。光学尾流探测研究近年虽说发展较快,但受光波的衰减及水体散射影响,其探测距离一直有很大限制。近些年来,有关局域表面等离子激元的研究取得了快速的发展并且广泛应用于生物检测,表面拉曼散射增强,光电探测器件等领域。局域表面等离激元共振会引起局域场增强效应,提高金属纳米结构的散射截面,并且表面等离激元的共振特性对所处介质环境折射率的变化特别敏感[19],微弱的局部环境折射率变化都会引起金属纳米结构共振吸收峰和散射光强度的变化,这为气泡尾流探测提供了新思路,即利用金属纳米结构的共振波长敏感性和散射截面增强特性,提高尾流气泡的散射光强度。前期分别在有金纳米颗粒和无金纳米颗粒的水溶液中对单个微米尺度气泡的后向散射光信号进行了数值模拟,结果如图 5 所示。
由图 5(a)和图 5(b)比较可看出,在无金纳米颗粒的水溶液中,单个微气泡对光的后向散射光信号很微弱,在 10-2左右数量级(入射光强度设定为 1),而在有金纳米颗粒的水溶液中,光的后向散射强度总体上都增强了 10 倍以上,这也许不能直接说明散射光的增强是由于金属纳米颗粒对气泡的散射特性增强所致,但对比图 5(a)和5(b)可以肯定的是,加了金纳米颗粒的水溶液中气泡对散射结果的影响要比没加金纳米颗粒的更大,即含有金纳米颗粒的水溶液对气泡引起的介质环境变化更敏感。由图 5(c)可看出在有金纳米颗粒的水溶液中,气泡引起的后向光散射强度显著增强,且对光波长是有明显的选择性,在 650 nm左右的波段区域,气泡对光的散射影响最大,这除了与纳米颗粒的材料有关,还和纳米颗粒的尺寸、形状和分布等因素密切相关,需要后期进行更为系统的深入研究。不久的将来有望将表面等离激元应用到气泡尾流探测当中,即在被测水域中加入某些在光波照射下对气泡非常敏感的物质,作为探针对气泡进行探测,这可从源头上提高回波信号的强度,进而提高信噪比和探测效率。目前常见的表面等离激元多是发生于贵金属(合金)纳米颗粒(如:金、银)表面,但随着科学技术的发展,有可能会发现一些普通的低成本替代物质,这将有利于它的广泛应用。
3 气泡尾流探测研究的应用价值
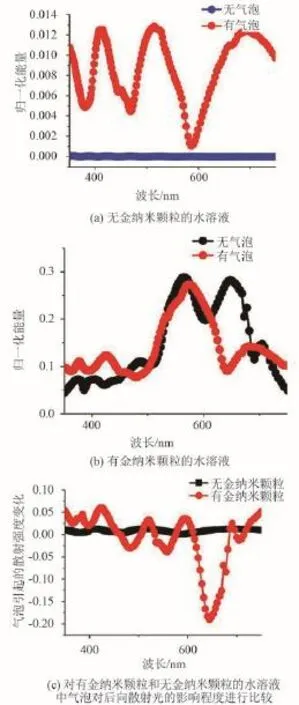
图 5 不同水溶液中有无气泡的后向光散射模拟情况Fig. 5 The simulation results of light backscatter propety in different conditions
气泡尾流探测研究不断被重视的主要原因在于其巨大的应用价值,最初只是在军事需求的推动下展开,如今已逐渐向民用领域延伸。
1)军事领域
军事上目前主要是利用气泡尾流特性实施对水面舰船探测、跟踪和追击。其中基于尾流声学效应的声呐探测技术已应用于各种鱼雷制导系统中,并对水面船舶航行安全构成了致命威胁。近年来正大力发展的基于气泡尾流场光学特性的鱼雷引导技术,将使鱼雷具有更强大的作战能力。气泡尾流探测研究的军事应用价值不仅仅在于对水面舰船的追踪攻击,更大的应用是对水下潜艇的定位探测。
2)民用领域
由于气泡尾流的几何外形特征与船型、航速等因素密切相关,且气泡尾流场的空间尺寸远大于目标舰船本身,故可利用遥感获得的气泡尾流信息,实现对目标的初步判断和识别,所以利用星载或机载光学遥感设备探测尾流,对大范围海域进行监控,可以及时发现非法进入领海的船舶,为海监执法提供可靠的信息保障,大大提高海监巡航的针对性和有效性,从而更好地维护国家的海洋权益[20]。由于气泡尾流的光学遥感特性与水中所含的物质成分密切相关,而拉曼激光雷达可直接反映水中物质的类型和含量,这可从一定程度上表征水体的受污染程度。因此,也可利用气泡尾流场的光学遥感特性初步判断大范围海域的水质变化情况,为海洋环境监测和保护提供信息。
4 结 语
综上所述,气泡尾流探测由于其重大的民用和军事应用价值,受到高度重视。气泡尾流探测的核心内容是尽可能地提高后向散射信号的信噪比,气泡尾流声学探测方法已经相对成熟,但存在一些无法克服的缺陷,光学探测方法的研究就是为了弥补声学方法的不足。经过不断努力,光学探测取得了许多重要的研究成果,其中脉冲回波和拉曼散射因其高度可辨识性,可作为激光雷达的核心技术,有望实现气泡尾流的高精度远距离探测。为了提高实际的探测精度,目前最好的举措还是将多种探测方法同时使用。气泡远场尾流探测的根本性难题是回波信号太微弱,现有的方法都是从减噪角度进行研究,如果应用表面等离激元及其他相关理论技术可以实现信号本身的增强,尾流探测将会有一个质的突破,这是不懈努力的目标。
[1]马青山, 陈亚林, 郝保安, 等. 舰船远尾流场气泡特性研究[J].鱼雷技术, 2014, 22(4): 311–315. MA Qing-shan, CHEN Ya-lin, HAO Bao-an, et al. Study on bubble characteristics of ship far wake field[J]. Torpedo Technology, 2014, 22(4): 311–315.
[2]龙建标. 水下航行器探测声纳系统[D]. 西安: 西北工业大学,2002. LONG Jian-biao. Sonar detection system for underwater vehicle[D]. Xi'an: Northwest Industry University, 2002.
[3]王赟, 刘继芳, 鲁振中, 等. 国内尾流光学检测研究进展[J].激光与光电子学进展, 2014, 51(12): 120004. WANG Yun, LIU Ji-fang, LU Zhen-zhong, et al. Domestic research progress in optical detection of wake[J]. Laser & Optoelectronics Progress, 2014, 51(12): 120004.
[4]朱东华, 张晓晖. 基于激光多普勒效应的舰船尾流探测研究[J]. 激光技术, 2006, 30(3): 298–300.ZHU Dong-hua, ZHANG Xiao-hui. Ship wake detection based on laser Doppler effect[J]. Laser Technology, 2006, 30(3): 298–300.
[5]王赟, 刘继芳, 鲁振中, 等. 尾流气泡群的激光多普勒检测方法[J]. 中国激光, 2014, 41(8): 081002. WANG Yun, LIU Ji-fang, LU Zhen-zhong, et al. Laser Doppler method for the detection of wake bubbles[J]. Chinese Journal of Lasers, 2014, 41(8): 081002.
[6]朱东华, 张晓晖. 水中微气泡光散射偏振特性的研究[J]. 海军工程大学学报, 2005, 17(5): 26–29, 42. ZHU Dong-hua, ZHANG Xiao-hui. Study on polarization of light scattered from microbubbles in water[J]. Journal of Naval University of Engineering, 2005, 17(5): 26–29, 42.
[7]陈航, 田晶, 戚茜. 一种基于退偏效应的激光尾流信号检测方法[J]. 光电子·激光, 2013, 24(8): 1563–1568. CHEN Hang, TIAN Jing, QI Qian. A detection method on laser ship wake guidance signal based on de polarization[J]. Journal of Optoelectronics·Laser, 2013, 24(8): 1563–1568.
[8]秦刚, 杨郁, 张建生. 船舰远程尾流散射光偏振特性的蒙特卡洛模拟[J]. 红外与激光工程, 2013, 42(7): 1730–1736. QIN Gang, YANG Yu, ZHANG Jian-sheng. Monto Carlo simulation of polarization properties of scattered light from far ship wakes[J]. Infrared and Laser Engineering, 2013, 42(7): 1730–1736.
[9]梁善勇, 王江安, 宗思光, 等. 基于多重散射强度和偏振特征的舰船尾流气泡激光探测方法[J]. 物理学报, 2013, 62(6): 060704. LIANG Shan-yong, WANG Jiang-an, ZONG Si-guang, et al. Laser detection method of ship wake bubbles based on multiple scattering intensity and polarization characteristics[J]. Acta Physica Sinica, 2013, 62(6): 060704.
[10]易媛媛, 杨克成, 张晓晖, 等. 激光在水中气泡微粒的后向散射特性[J]. 光学与光电技术, 2006, 4(6): 38–41. YI Yuan-yuan, YANG Ke-cheng, ZHANG Xiao-hui, et al. Laser backscattering characteristics of bubbles in water[J]. Optics & Optoelectronic Technology, 2006, 4(6): 38–41.
[11]韩彪, 刘继芳, 周少杰, 等. 激光脉冲宽度对远距离尾流气泡后向检测的影响[J]. 光子学报, 2011, 40(9): 1372–1375. HAN Biao, LIU Ji-fang, ZHOU Shao-jie, et al. Influence of laser pulse width on backward detection of long-distance wake bubbles[J]. Acta Photonica Sinica, 2011, 40(9): 1372–1375.
[12]韩彪, 刘继芳, 刘昆仑, 等. 舰船尾流气泡后向光学检测方法研究[J]. 光学学报, 2012, 32(1): 0101001. HAN Biao, LIU Ji-fang, LIU Kun-lun, et al. Study of backward optical detection method for ship wake bubbles[J]. Acta Photonica Sinica, 2012, 32(1): 0101001.
[13]郑毅, 杨克成, 夏珉, 等. 脉冲能量对水下激光雷达性能的影响[J]. 光学与光电技术, 2009, 7(1): 33–35. ZHENG Yi, YANG Ke-cheng, XIA Min, et al. Effects of pulse energy on underwater Lidar system[J]. Optics & Optoelectronic Technology, 2009, 7(1): 33–35.
[14]梁善勇, 王江安, 韦文涛, 等. 水下航行体尾迹激光雷达探测系统的研制[J]. 华中科技大学学报(自然科学版), 2011,39(9): 25–28. LIANG Shan-yong, WANG Jiang-an, WEI Wen-tao, et al. Development of Lidar detection systems for underwater vehicle wakes[J]. Journal of Huazhong University of Science and Technology (Nature Science Edition), 2011, 39(9): 25–28.
[15]BUNKIN A F, KLINKOV V K, LUKYANCHENKO V A, et al. Ship wake detection by Raman Lidar[J]. Applied Optics,2011, 50(4): A86-A89.
[16]刘西站, 薛艳博, 何俊华. 应用于水下能分辨粒径 10 μm ~500 μm 尾流气泡的成像系统[J]. 应用光学, 2014, 35(1): 31–37. LIU Xi-zhan, XUE Yan-bo, HE Jun-hua. Underwater imaging system identifying 10 μm ~ 500 μm wake bubbles[J]. Journal of Applied Optics, 2014, 35(1): 31–37.
[17]袁军行, 陈良益. 尾流的全息成像方法研究[J]. 光子学报,2009, 38(3): 636–640. YUAN Jun-hang, CHEN Liang-yi. Wake holographic imaging[J]. Acta Photonica Sinica, 2009, 38(3): 636–640.
[18]韩正英, 于佳, 王金城, 等. 基于数字全息术的水中气泡场获取方法的研究[J]. 光学技术, 2010, 36(4): 617–621. HAN Zheng-ying, YU Jia, WANG Jin-cheng, et al. The research of under water bubble field on digital holography[J]. Optical Technique, 2010, 36(4): 617–621.
[19]王振林. 表面等离激元研究新进展[J]. 物理学进展, 2009,29(3): 287–324. WANG Zhen-lin. A review on research progress in surface plasmons[J]. Progress in Physics, 2009, 29(3): 287–324.
[20]田恒斗, 金良安, 石侃. 气泡艉流场特征及其研究综述[J]. 中国航海, 2009, 32(4): 44–48. TIAN Heng-dou, JIN Liang-an, SHI Kan. Characteristics of ship bubble wake field and summary of research on it[J]. Navigation of China, 2009, 32(4): 44–4
Research on optical detection of wake-bubble of vessels and ships
GUO Lu-ping, ZHAI Yu-sheng, WANG Qi-long, QI Zhi-yang
(School of Electronic Science and Engineering, Southeast University, Nanjing 210096, China)
Acoustic and optical detection methods of wake-bubbles for ships are introduced in this paper.The influences of bubbles on intensity, frequency and polarization of scattered light are discussed in detail.It expounds the fundamentals, the development and the problems existing in different detection approaches for the wake-bubbles, which includ the pulse echo,the laser Raman scattering and the optical imaging detection.In order to improve the signal-to-noise ratio, a novel method of surface plasmon on bubble wake detection is proposed.Due to the good real-time performance, high sensitivity and wide detection area, the optical detection of wake-bubbles and its corresponding application system have the potential to be widely applied in the monitoring of ship sailing, water pollution and biotic env ironment in the ocean.
wake detection;bubbles;optical scattering
U661;TN29
A
1672 – 7619(2016)04 – 0001 – 06
10.3404/j.issn.1672 – 7619.2016.04.001
2015 – 12 – 14;
2016 – 03 – 03
郭露萍(1990 – ),女,硕士研究生,主要从事光电探测和表面等离激元方面研究。
