电动方程式赛车传动系统的设计与仿真
2016-08-16田哲文袁晓东刘易斯刘翔彭熠武汉理工大学汽车工程学院武汉430070
田哲文,袁晓东,刘易斯,刘翔,彭熠(武汉理工大学 汽车工程学院,武汉430070)
电动方程式赛车传动系统的设计与仿真
田哲文,袁晓东,刘易斯,刘翔,彭熠
(武汉理工大学汽车工程学院,武汉430070)
将电动方程式赛车作为研究对象,根据整车性能要求,匹配出该赛车的电机,电池和传动系统的参数,再利用AVL CRUISE软件对赛车进行建模和仿真分析。根据得到的仿真结果来分析电动方程式赛车的动力性和经济性,从而验证匹配的合理性。对赛车设计和改进提供了理论指导。
电动方程式赛车;传动系统;参数匹配;CRUSIE;仿真
田哲文
毕业于武汉理工大学车辆工程专业 硕士研究生 武汉理工大学汽车工程学院 副教授电动汽车及汽车动力学。
1 引言
随着环境污染与能源匮乏这两大难题的日益凸显,世界各大汽车公司都在寻找一款可以代替传统燃油车的新型汽车,而电动汽车由于其自身无污染,低排放等优点,越来越多地获得人们的关注[1]。为了培养新能源汽车的人才,中国汽车工程协会于2013举办第一届电动方程式汽车大赛。并于2015年在上海F1赛道举办真正意义上的FSEC比赛,即中国大学生电动方程式赛车大赛。
往年设计电动方程式赛车是基于油车基础上进行改进,对于动力传动系统的匹配是通过理论计算得到的。但是没有通过仿真来分析赛车动力性和经济性,导致传动系统的设计不满足整车性能要求。本文主要以电动汽车作为研究模型,对电动方程式赛车的电机,电池和传动系统传动比进行参数匹配,以及运用CRUISE 软件对其整车动力性和经济性进行仿真。通过仿真结果来验证设计的合理性。
2 电动方程式赛车传动系统的设计
2.1电动方程式赛车的整车性能要求
中国大学生方程式赛车大赛的动态比赛项目包括了耐久项目、0-75m直线加速项目、8字绕环项目和高速壁障项目。为了完成比赛,赛车必须要在动力性、经济性、操纵稳定性、平顺性和制动性等方面表现良好。传动系统参数对0-75m直线加速项目和耐久项目影响较大,因此设计的传动系统必需要满足续航里程和动力性的要求。
电动方程式赛车动力传动系统是由蓄电池、控制器、电机、主减速器、半轴、驱动轮等组成[2]。
本文是通过参考了国内外电动方程式赛车的设计资料的基础上,设计一款电动方程式赛车,并匹配出电机,电池和传动系的参数。表1表示了电动方程式赛车整车的基本参数和性能要求。

表1 电动赛车整车的基本参数以及性能要求
2.2电机参数的选择
电机的主要参数包括了电机的额定转速、额定功率、峰值转速和峰值功率[3]。
(1)根据最高车速得到赛车的峰值功率
电动方程式赛车电机的参数是根据赛车的最高车速来确定的,选择的电机功率应大于等于赛车在最高车速行驶时的行驶阻力功率之和。当赛车以最高车速在水平道路上匀速行驶时可忽略加速阻力,假定风速为0,则需要的电机输出功率为:
式中: P1为电机的额定功率;m为整车的满载质量;f 为滚动阻力系数;umax为赛车的最高车速;Cd为空气阻力系数;A 为迎风面积; ηt为传动效率。
其中f(u)=1.2(0.0098+0.025[u /(100km/h)]
(2)根据加速性能得到电机的峰值功率
在0-75m的水平直道上,赛车加速到75m时为电动方程式赛车的输出最大功率,假设这个过程风速为0,电机在加速过程所需最大功率为:
式中: P2为电机在加速末端时的峰值功率;ua为加速末端的速度,km/h ;ta为加速时间,s;δ为旋转质量系数。
式子中:Iw为车轮的转动惯量;If为飞轮的转动惯量;R 为车轮半径;ig为变速器的传动比;i0为主减速器的传动比。
(3)确定电机峰值功率
电动方程式赛车的电机的功率应该同时满足赛车的最高车速和加速的性能,所以的电动方程式赛车电机的功率应该满足:
t
按照设计要求,选择合适的电机。并得到电机的外特性曲线图和电机效率图。
2.3电池容量选择
电池组容量的选择主要根据赛车的最大输出功率和输出能量,从而保证电动方程式赛车的动力性和续驶里程的要求[6]。电动赛车结构相对于电动汽车而言结构简单,没有采用制动能量回收装置。所以计算电池容量如下所示。
(1)根据最大功率计算电池的数目
式子中:P2为电机的最大功率;Pb为电池的最大输出功率;ηe为电机的工作效率;ηec为电机控制器的工作效率;n1为电池数目。
(2)根据续航里程计算电池组数目
式中:L 为续航里程;W 为行驶1km所消耗的能量;Cr为电池组中单块电池额定容量;V1为单块蓄电池电压;n 为电池数目[7]。
则电池的数目可以表示为:
2.4传动比的选择
当电机的输出特性一定时,传动系的传动比的选取主要是根据方程式赛车动力性的要求,即电动方程式赛车的传动比的选择应该满足赛车的最高车速和0-75m的加速度时间的要求[8]。
(1)按照最高车速计算传动比
式中:nmax为电机最高转速。
根据赛车电机的最大转速和赛车的最高车速可以确定赛车传动比的一个范围。而且当赛车达到最高车速时,赛车的驱动力还应该大于行驶阻力,所以还应该满足下式:
式中:Ff为空气阻力;Fw为空气阻力;Tm为赛车到达最高车速时电机对应的转矩。
(2)按照加速性能计算传动比
因为方程式赛车要在0-75m的加速时间尽可能的短,时间最好控制在4.5s以内。所以传动比还应该满足:
式中:Fj为加速阻力,Fj= δma ;a 为加速度; δ 为旋转质量系数。
2.5电动方程式赛车的匹配结果
电动方程式赛车的参数在满足表1的基础上,得到的动力传动系统的匹配结果如表2所示:

表2 电动赛车匹配参数
3 基于AVL CRUISE建模与仿真
AVL CRUISE 是奥地利李斯特内燃机及测试设备公司开发的,主要是研究汽车动力性、燃油经济性、排放性能及制动性能的仿真分析软件[9]。
3.1建立整车模型
根据赛车的动力传递路线:电机-主减速器-差速器-半轴-车轮,建立整车模型。如图3-1所示:
3.2设定计算任务
本文主要是研究电动赛车在实际赛道上的运行情况,但是AVL CRUISE没有相应赛道的工况图。为了得到较为准确的仿真结果,需要根据赛道的测试数据建立相应的赛道工况图。最后得到赛道工况图如图3-2所示:
根据设计要求选择相应的仿真任务,主要由以下几个任务。
(1)全负荷加速性能任务
在全负荷加速性能任务中主要根据需要建立两个仿真指标,分别是测试0-75m原地起步加速时间和最高车速。
(2)循环工况任务
主要是测试在赛道工况下,赛车行驶情况。根据在赛道工况下,得到赛车的百公里能量消耗。通过能量消耗,计算出赛车对赛道工况下的续航里程。
3.4仿真结果分析
(1)循环工况下电机特性分析
图3-3表示赛车在赛道工况下车速,加速度和距离仿真曲线。在赛道工况下,电动赛车的速度,加速度和距离仿真曲线表明赛车运行良好。电动赛车的最高车速可以达到108km/h;最大加速度为8.3m/s2,最大减速器为-7.5m/s2。表明赛道工况下,赛车加速和减速情况较多,运行情况较为激烈。
(2)直线加速分析
图3-4是直线加速部分的速度,路程和加速度曲线图,根据Cruise的自带的文件查看器可知0-75m的加速时间为4.2s,通过仿真可以满足设计要求。
(3)最高车速结果分析
根据图3-5的仿真曲线可以知道,电动赛车的最高车速可以达到118km/h,满足设计要求。
(4)续航里程分析
续航里程通过在赛道工况下电池的电量变化情况(SOC曲线)和百公里能量消耗得到。图3-6表示电池SOC变化曲线,根据图可以知道电动赛车在完成一圈电池的SOC从100%降低到97.15%。Cruise分析结果报告得到百公里能量消耗为12.7kwh/100km,近似得到赛车在该工况下的续航里程为44km。
(5)仿真结果对比
根据软件仿真得到的结果与设计要求进行对比,如表3所示:
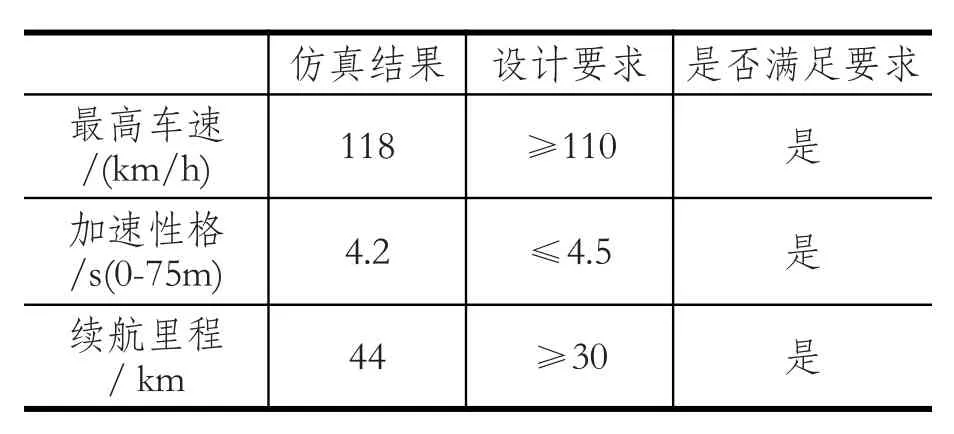
表3 整车仿真结果和设计要求对比
4 结论
本文首先对一款处于尚未制造出来的电动赛车进行了电机,变速器和主减速器的参数匹配分析,然后对其进行建模和仿真。仿真结果均满足整车参数要求,说明本文所匹配的电机,变速器和主减速满足设计要求。为后续研发和设计工作缩短了周期,节约了成本。仿真结果为实车的设计提供了重要的依据。
[1]袁苑.基于CRUISE中型纯电动客车动力匹配仿真[J].农业装配与车辆工程,2012,50(5),15-18.
[2]杨祖元.电动汽车动力传动系统参数设计及动力性仿真[J].重庆大学学报,2002,25(6),19-22.
[3]景柱.纯电动汽车动力传动系统的匹配与仿真[J].汽车工程学报,2013,3(1),054-057.
[4]郭孔辉.电动汽车的传动系统的匹配和优化[J].科学技术与工程:2010,10(16).3892-3894.
[5]熊明洁,胡国强,闵建平.纯电动汽车动力参数选择与匹配[J].汽车工程师,2011(5):36-38.
[6]冯瑞.混合动力城市客车参数优化及能量回馈研究[D].合肥;合肥工业大学,2011.
[7]余志生.汽车理论[M].北京:机械工业出版社,2009:33-105.
[8]严运兵.电动汽车概论[M].北京:机械工业出版社,2012:19-65.
[9]王保华,罗永革.基于CRUISE的汽车建模与仿真[J].湖北工业学院学报,2005,19(2):5-8.
专家推荐
孙立清:
论文以电动方程式赛车为研究对象,根据整车性能要求,匹配了电机、电池和传动系统等参数,进而利用AVL CRUISE软件对赛车进行建模和仿真分析。依据仿真结果分析了电动方程式赛车的动力性和经济性,证明了匹配的合理性。论文对赛车设计和改进有重要的理论指导意义和工程实践价值,建议采用发表。
Power-train design and simulation of electric formula car
TIAN Zhe-wen,YUAN Xiao-dong,LIU Yi-si,LIU Xiang,PENG yi
( Wuhan University of Technology,Institute of Automotive Engineering,Wuhan 430070,china )
The matching parameters of the motor,battery and power-train of an electric formula car,taken as research object,are calculated according to the performance requirements of the vehicle. Then the model of the electric formula car is established and simulated by AVL CRUISE. The results of simulation,the analysis of the dynamic and economic performance of the formula car,proved the reasonable of the design at last. The paper can provide theoretical direction of formula car's design and improvement.
Electric formula car; power-train; parameters matching; CRUSIE; simulation
2016-03-24
U462
A
1005-2550(2016)04-0034-05
10.3969/j.issn.1005-2550.2016.04.006
