高可靠性再入轨迹快速规划方法
2016-08-15周文雅王恩美吴志刚
周文雅, 王恩美, 吴志刚,2
(1. 大连理工大学航空航天学院, 辽宁 大连 116024;2. 大连理工大学工业装备结构分析国家重点实验室, 辽宁 大连 116024)
高可靠性再入轨迹快速规划方法
周文雅1, 王恩美1, 吴志刚1,2
(1. 大连理工大学航空航天学院, 辽宁 大连 116024;2. 大连理工大学工业装备结构分析国家重点实验室, 辽宁 大连 116024)
提出一种高可靠性再入参考轨迹快速规划方法。在参考轨迹生成过程中,如果飞行路径角变化率不足够小,拟平衡滑翔条件(quasi-equilibrium glide condition, QEGC)的应用前提得不到保证,利用QEGC所得的倾斜角剖面不保守,从而导致生成的参考轨迹有穿越再入走廊的风险。为得到高可靠性再入轨迹,在倾斜角搜索过程中,除了使再入参考轨迹满足路径约束与终端约束外,同时将QEGC的应用前提“飞行路径角及其变化率为小量”作为倾斜角搜索的一项约束。计算结果表明所提方法能够保证再入轨迹的可靠性,同时基于QEGC规划方法的适应性得到保留。
再入轨迹规划; 拟平衡滑翔条件; 高可靠性
0 引 言
再入参考轨迹能够引领航天器实现再入飞行,其设计是航天器再入工程中的关键技术之一。对于升力式航天器再入而言,由于航天器本身升阻比大、再入飞行时间较长,必须通过气动力机动实现驻点热流减缓和总吸热量降低。同时,再入过程还受到严格的过载和动压限制。以上条件构成了此类航天器再入的路径约束。除此以外,航天器再入飞行还要满足终端约束条件,即航天器在再入段结束后、进入能量管理段前应到达指定区域范围内,同时高度、速度、飞行路径角均满足末端制导要求。另外,为满足现代航天器在轨制导需求,再入轨迹规划必须满足快速性和适应性要求。
从20世纪50年代开始,有关再入轨迹规划的研究就已经开展。早期的研究主要是针对航天飞机再入而展开的,在满足路径约束的前提下,根据航程要求规划阻力加速度相对速度的剖面,并以此作为航天飞机再入轨迹[1]。在此基础上,文献[2]通过对动力学模型进行简化,以能量作为自变量,利用降维模型规划了再入轨迹,提高了轨迹规划速度。
随着计算机性能的大幅提高和优化理论的不断发展,利用优化方法来获得再入轨迹的研究受到广泛关注。其中,近些年以Gauss伪谱方法为代表的直接优化方法得到大量研究和应用[3-6]。它摒弃了间接法中猜测协状态的困难,能够方便地给出路径约束和终端约束条件,同时由于微分形式Gauss伪谱方法的运用,运算速度进一步提高。但同时发现,由于Gauss伪谱方法只关注Gauss点上状态量和控制量的计算,Gauss点间状态量和控制量是通过插值获得的,这将造成再入轨迹不够平滑。同时由于末端状态不受路径约束的限制,跳变现象时有发生。此外,其他优化方法在计算最优再入轨迹中也有所应用,如二次规划法[7],智能寻优算法[8-9]等。两点边值问题的新算法也给轨迹优化提供了新的思路[10-11]。尽管通过优化理论能够离线设计出满意的再入轨迹,但由于优化方法对初始条件敏感,收敛性及收敛速度难以保证,这些缺陷决定了这种方法难以得到实际应用。
近些年,以拟平衡滑翔条件(quasi-equilibrium glide condition, QEGC)为核心算法的轨迹规划方法得到进一步发展[12-14]。其求解思路为:在“飞行路径角及其变化率均为小量”前提下,利用拟平衡滑翔条件将路径约束直接转化为控制量的上下边界,即边界范围内的控制量对应的再入轨迹一定满足路径约束条件。进一步,在控制量边界范围内通过线性搜索方法可以确定满足终端约束的控制变量历程。这种方法大幅降低了求解难度和计算量,保证了再入轨迹的生成速度,这使得这种规划方法具有应用于在轨制导的潜力。可见,这种方法的应用前提“飞行路径角及其变化率均为小量”必须首先得到满足。但在研究中发现,在轨迹规划过程中,如果不对飞行路径角变化率加以限制,难以保证在整个规划过程中其值均为小量。当其值较大时,QEGC不再成立,依据QEGC所得到的控制量边界不再保守,也意味着规划出的轨迹存在超越再入走廊的风险。为提高再入轨迹的可靠性,在轨迹规划过程中必须对飞行路径角变化率加以限制,使其始终保持为小量。
1 再入问题描述
1.1再入动力学方程
考虑地球自转影响,推导升力飞行器无量纲再入动力学方程如下:

(1)
(2)
(3)
(4)
(5)
(6)

(7)
(8)
式中,S是航天器气动参考面积,S=0.322m2;m是航天器的质量,m=816.48kg;ρ是大气密度,它随海拔高度的变化规律可以表示为ρ=ρ0e-h/β,其中,ρ0是海平面处的大气密度,ρ0=1.225kg/m3;h代表海拔高度,h=r*-R0;β为大气常数,取β=6 700。升力系数CL和阻力系数CD均是攻角α和速度V*的函数。
1.2再入路径约束
航天器在再入飞行过程中,所受路径约束包括驻点热流、过载和动压。这3方面约束对航天器再入而言构成“硬约束”,一旦超过最大允许值,则航天器结构将被破坏,甚至导致再入任务失败。
(1) 驻点热流约束
(9)

(2) 过载约束
(10)
式中,n代表过载。
(3) 动压约束
(11)
式中,q代表动压。

(4) 拟平衡滑翔条件
(12)


图1 再入走廊
1.3再入终端约束
再入终端约束是指航天器应符合末端能量管理段进入窗口要求,这里以高度、速度和位置作为再入终端约束。研究中,以速度作为终止计算的判断条件,即速度达到预定值则停止仿真。此时要求高度也应满足末端能量管理段进入窗口要求。
h=hf
(13)
(14)
(15)
(16)

2 再入轨迹规划
2.1利用QEGC规划再入轨迹
再入轨迹规划就是通过搜索合适的控制变量,使再入轨迹满足上述路径约束和终端约束。
将升力航天器再入动力学方程解耦成纵向和侧向运动方程。引入待飞航程概念,定义航天器所在点、目标点和地心所确定的平面为瞬时目标平面,那么,待飞航程指航天器在瞬时目标平面内将飞行的大圆弧长,其表示形式如下:
(17)


图2 航向误差角

(18)
(19)
(20)
假设飞行路径角及其变化率均为零,根据式(5)可以得到:
(21)

(22)
研究中采用的攻角剖面如图3所示。攻角剖面是通过以航程最远为优化目标,利用遗传优化算法得到的,详见文献[16]。研究过程中,目标点的选择已经考虑了飞行器的飞行能力,本文中的终端条件是按照接近最远航程而设定的。

图3 攻角随速度的变化曲线
图4给出了由式(21)确定的倾斜角的上下界以及通过线性搜索得到的倾斜角剖面。
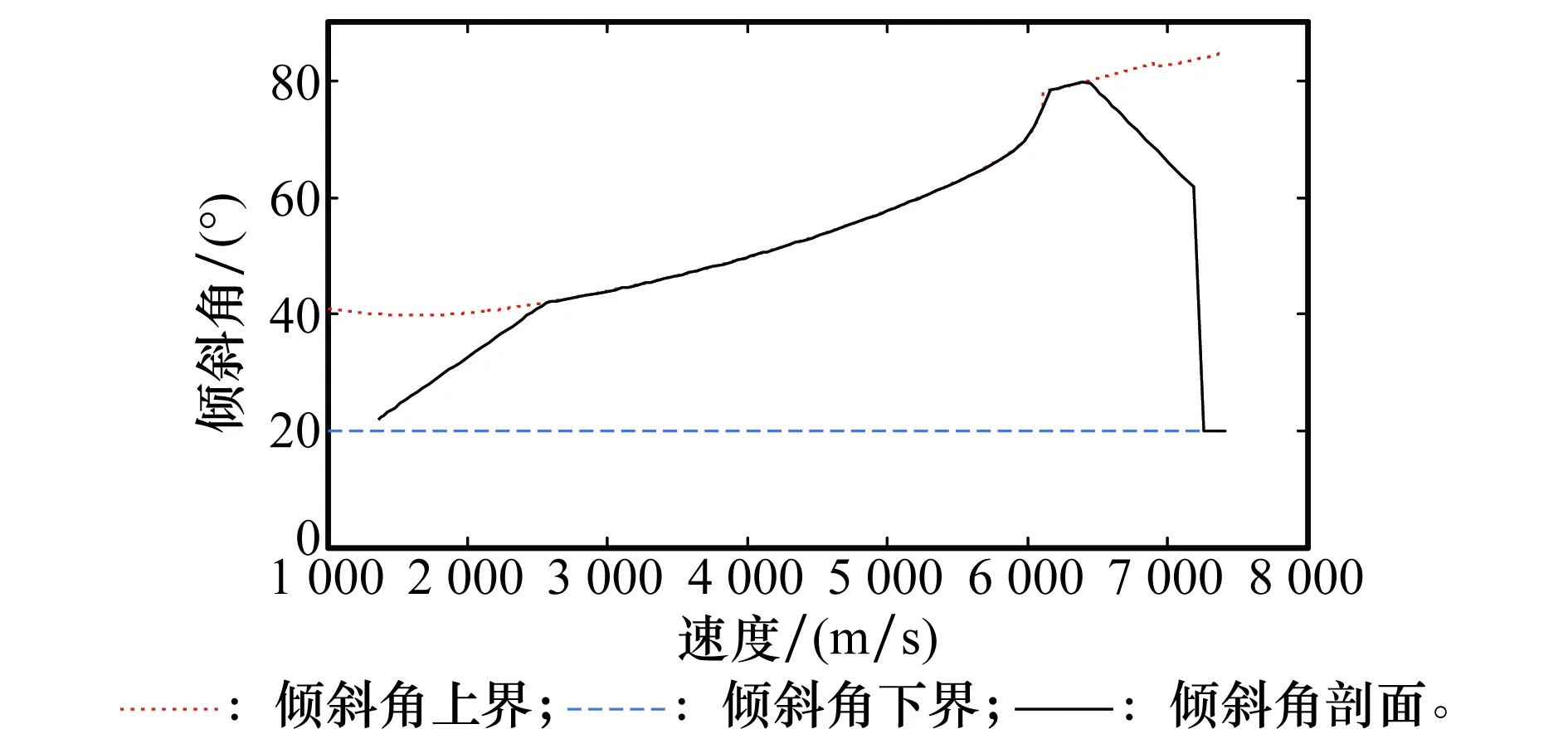
图4 倾斜角边界及剖面
利用图3所示的预先设置好的攻角剖面和通过搜索获得的图4所示的倾斜角剖面,通过对式(18)~式(20)进行数值积分,可以得到航天器再入轨迹,如图5所示。由于攻角预先设定,而倾斜角的搜索过程是收敛的,所以能够很快得到积分结果。可见,再入轨迹穿越了再入走廊下边界,由于下边界是“硬约束”,必须对得到的再入轨迹进行改进。

图5 基于QEGC方法得到的纵向轨迹
2.2问题分析
再入轨迹穿越再入走廊下边界与图4所示的倾斜角剖面没有超越上边界似乎相互矛盾。为分析导致上述现象的原因,图6给出飞行路径角及其变化率随速度的变化曲线。

图6 飞行路径角及其变化率曲线


图7 未忽略得到的倾斜角上边界
可见,在再入轨迹规划过程中如果不限定飞行路径角变化率,将造成倾斜角上边界不保守,得到的倾斜角剖面可靠性差。为此,必须在轨迹规划过程中实时监测并修正路径角变化率,使其始终保持为小量。如果上述条件满足,则得到的倾斜角同样为小量,以“拟平衡滑翔条件”为核心的规划方法的应用前提得到保证。
2.3改进的再入轨迹规划方法

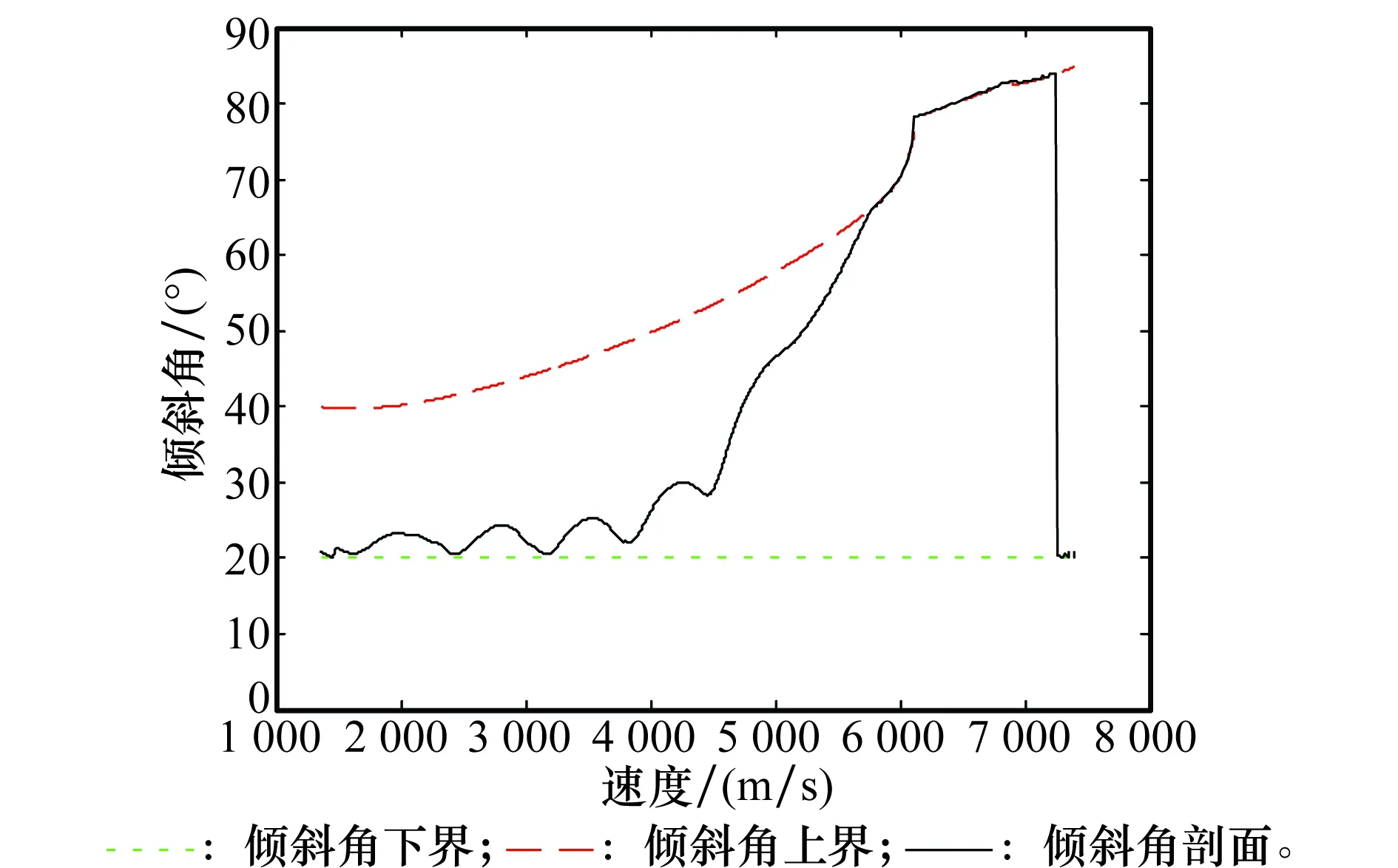
图8 改进的倾斜角规划
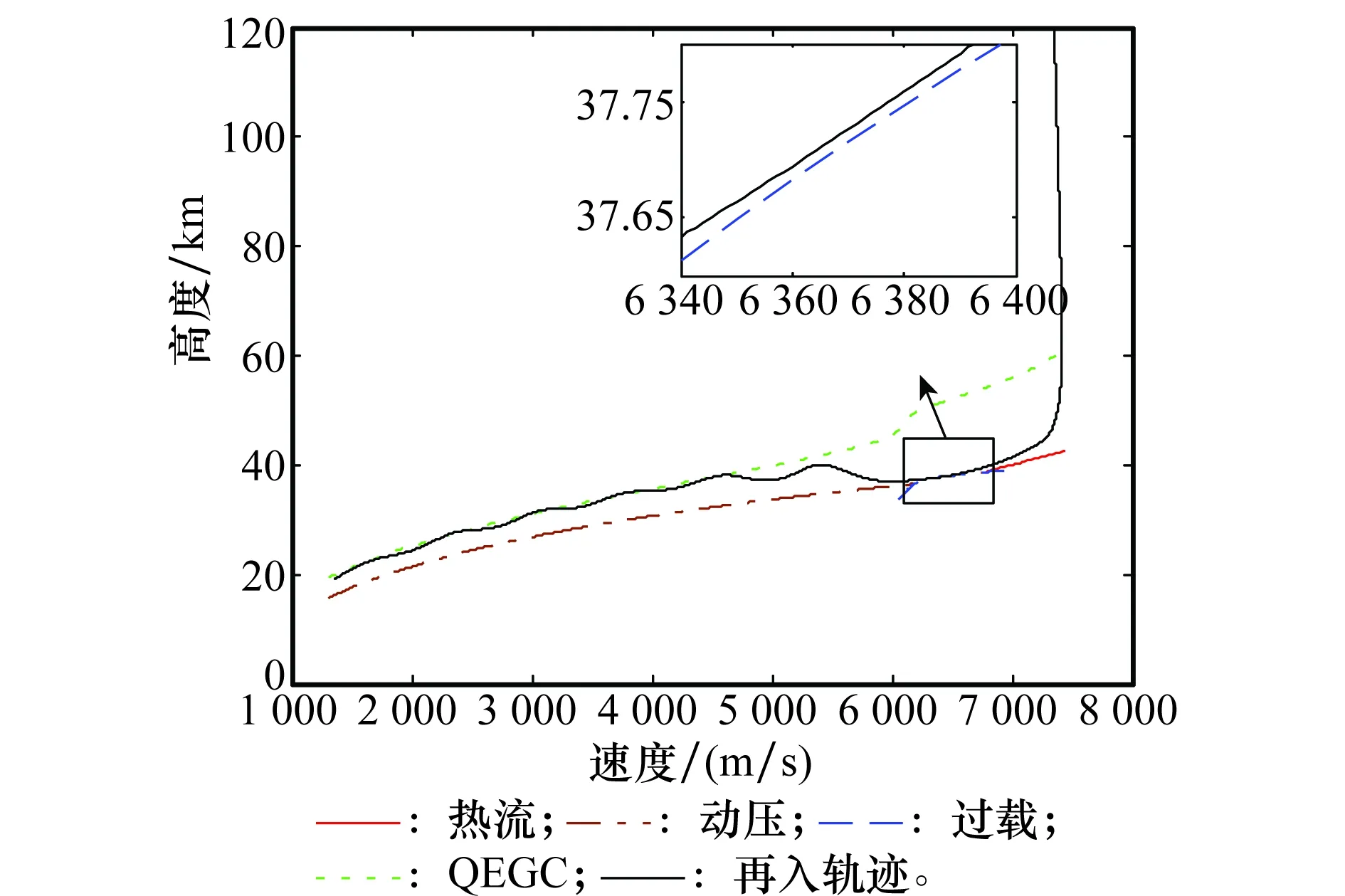
图9 利用改进规划方法得到的纵向轨迹

图10 允许的航向误差角范围
利用上述倾斜角反转方法,可以控制航天器横侧向轨迹。航天器飞向目标的地面投影轨迹如图11所示。
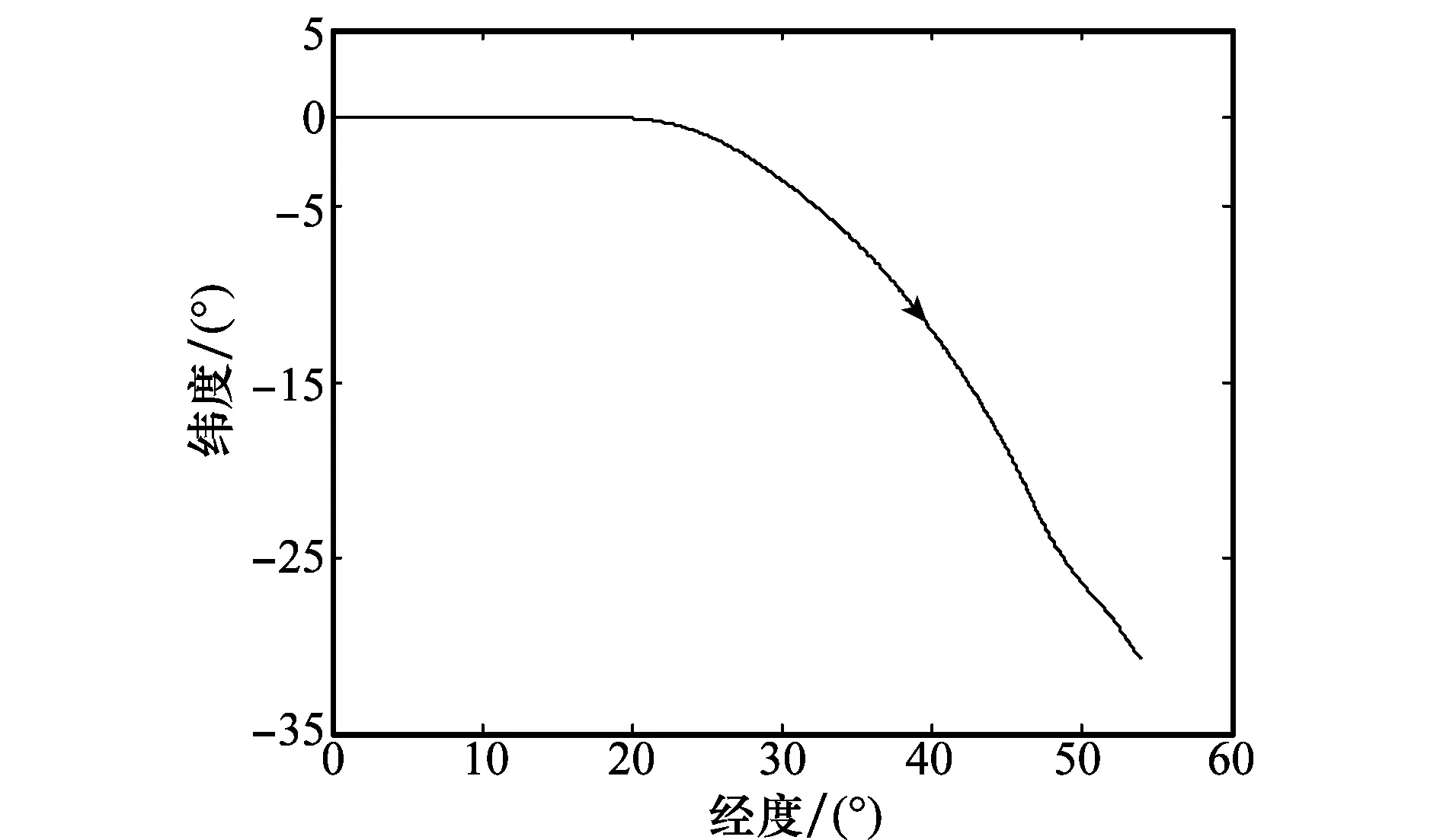
图11 地面投影轨迹
由航天器地面投影轨迹可知,航天器能够到达预定的目标位置。
3 结 论
研究了以“拟平衡滑翔条件”为核心算法的再入参考轨迹规划方法。为避免轨迹规划过程中因倾斜角剖面不保守而导致轨迹穿越再入走廊的情况,提出一种改进的方法。在利用拟平衡滑翔条件搜索倾斜角过程中判断并修正飞行路径角变化率,保证这一条件在轨迹规划过程中始终得到满足。这就使得再入参考轨迹能够始终处于再入走廊之内,提高了再入轨迹的可靠性。此外,能够获得更为平滑的参考轨迹是该方法的另一个优势。
[1] Harpold J C, Graves C A. Shuttle entry guidance[J].JournaloftheAstronauticalSciences, 1979, 37(3): 239-268.
[2] Mease K D, Chen D T, Teufel P, et al. Reduced order entry trajectory planning for acceleration guidance[J].JournalofGuidance,Control,andDynamics, 2002, 25(2): 257-266.
[3] Ross I M, Karpenko M. A review of pseudospectral optimal control: from theory to flight[J].AnnualReviewsinControl, 2012, 36(2): 182-197.
[4] Zhao J, Zhou R. Reentry trajectory optimization for hypersonic vehicle satisfying complex constraints[J].ChineseJournalofAeronautics, 2013, 26(6): 1544-1553.
[5] Zhou W Y, Yang D, Li S L. Solution of reentry trajectory with maximum cross range by using Gauss pseudospectral method[J].SystemsEngineeringandElectronics, 2010, 32(5): 1038-1042.(周文雅,杨涤,李顺利.利用高斯伪谱法求解具有最大横程的再入轨迹[J].系统工程与电子技术,2010,32(5):1038-1042.)
[6] Shui Z S, Zhou J, Ge Z L. On-line predictor-corrector reentry guidance law based on Gauss pseudospectral method[J].JournalofAstronautics,2011,32(6):1249-1255.(水尊师,周军,葛致磊.基于高斯伪谱方法的再入飞行器预测校正制导方法研究[J].宇航学报,2011,32(6):1249-1255.)
[7] Sun J W, Qiao D, Cui P Y. Study on the optimal trajectories of lunar soft-landing with fixed-thrust using SQP method[J].JournalofAstronautics,2006,27(1):99-102,112.(孙军伟,乔栋,崔平远.基于SQP方法的常推力月球软着陆轨道优化方法[J].宇航学报,2006,27(1):99-102, 112.)
[8] Rahimi A, Kumar K D, Alighanbari H. Particle swarm optimization applied to spacecraft reentry trajectory[J].JournalofGuidance,Control,andDynamics, 2013, 36(1): 307-310.
[9] Duan J J, Xu S J, Zhu J F. Optimization of lunar soft landing trajectory based on ant colony algorithm[J].JournalofAstronautics, 2008,29(2):476-481,488.(段佳佳,徐世杰,朱建丰.基于蚁群算法的月球软着陆轨迹优化[J].宇航学报,2008, 29(2): 476-481, 488.)
[10] Peng H J, Gao Q, Wu Z G, et al. Symplectic adaptive algorithm for solving nonlinear two-point boundary value problems in astrodynamics[J].CelestialMechanicsandDynamicalAstronomy, 2011, 110(4): 319-342.
[11] Peng H J, Gao Q, Wu Z G, et al. Symplectic approaches for solving two-point boundary-value problems[J].AIAAJournalofGuidance,Control,andDynamics,2012,35(2):653-658.
[12] Shen Z J, Lu P. Onboard generation of three-dimensional constrained entry trajectories[J].JournalofGuidance,Control,andDynamics, 2003, 26(1): 111-121.
[13] Lu P, Xue S. Rapid generation of accurate entry landing footprints[J].JournalofGuidance,Control,andDynamics, 2010, 33(3): 756-767.
[14] Xu M L, Chen K J, Liu L H, et al. Quasi-equilibrium glide adaptive guidance for hypersonic vehicles[J].ScienceChinaTechnologicalSciences, 2012, 55(3): 856-866.
[15] Zhou W Y, Lei T, Yang D, et al. Study on thermal peak, maximum overload and dynamic pressure peak during reentry flight of common aero vehicle[J].MissilesandSpaceVehicles, 2009, 6(6): 19-22. (周文雅, 雷涛, 杨涤, 等. 通用航空飞行器载入大气的热流缝制、最大过载和动压峰值研究[J].导弹与航天运载技术, 2009, 6(6): 19-22.)
[16] Zhou W Y, Ma H T, Wu Z G, et al.Parallelgeneticalgorithmappliedtospacecraftreentrytrajectory[M].Practical Applications of Intelligent Systems. Berlin: Springer, 2014: 867-875.
Rapid planning of reentry trajectory with high reliability
ZHOU Wen-ya1, WANG En-mei1, WU Zhi-gang1,2
(1. School of Aeronautics and Astronautics, Dalian University of Technology,Dalian 116024, China; 2. State Key Laboratory of Structural Analysis for Industrial Equipment, Dalian University of Technology, Dalian 116024, China)
A rapid planning method for high reliable reentry trajectory is proposed. In the process of generating the reference trajectory, the premise of applying the quasi-equilibrium glide condition (QEGC) does not hold if the rate of the path angle is not small enough. The bank angle profile based on the QEGC will be non-conservative, and then the generated reentry trajectory might be at risk of crossing the reentry corridor. With the goal of high reliability, the reentry reference trajectory should satisfy path constraints and terminal constraints during the process of searching the bank angle. Meanwhile, the premise of the QEGC that both the path angle and its rate are small quantities is also considered as a constraint on the bank angle. The simulation results demonstrate that the proposed method can guarantee the reliability of reference trajectory with preservation of the adaptability and rapidity.
reentry trajectory planning; quasi-equilibrium glide condition (QEGC); high-reliability
2015-05-26;
2016-01-03;网络优先出版日期:2016-02-18。
中央高校基本科研业务费专项资金(DUT15LK42); 航空基金(20130163002)资助课题
V 249
A
10.3969/j.issn.1001-506X.2016.08.23
周文雅(1981-),男,讲师,博士,主要研究方向为飞行器导航制导与控制、飞行器系统仿真。
E-mail:zwy@dlut.edu.cn
王恩美(1991-),女,博士研究生,主要研究方向为分布式控制系统设计。
E-mail: enmei@mail.dlut.edu.cn
吴志刚(1971-),男,教授,博士,主要研究方向为飞行器动力学与控制。
E-mail:wuzhg@dlut.edu.cn
网络优先出版地址:http://www.cnki.net/kcms/detail/11.2422.tn.20160218.1213.010.html