基于高程补偿的BLUE算法在塔康中的应用研究
2016-08-15王金根陈治平赵温波
盛 琥, 王金根, 陈治平, 曹 燕, 赵温波
(陆军军官学院无人机系, 合肥 安徽 230031)
基于高程补偿的BLUE算法在塔康中的应用研究
盛琥, 王金根, 陈治平, 曹燕, 赵温波
(陆军军官学院无人机系, 合肥 安徽 230031)
基于塔康系统的斜距、方位和高程可对目标定位,但较大的量测误差影响定位精度。为提高估计精度,研究塔康中最佳线性无偏估计(best linear unbiased estimation, BLUE)滤波器的实现。建立地面站对目标的量测模型,并分析量测转换误差特性,推导出对应的BLUE滤波模型;针对目标从地面站上空过顶时出现无效量测的问题,通过对高程量测补偿的方法予以克服,解决传统算法在强非线性量测下误差较大的弊病。与经典方法的性能对比表明,改进算法有效地抑制了强非线性量测下的滤波发散,有很强的鲁棒性和实时性。
塔康系统; 最佳线性无偏估计; 非线性滤波; 量测转换
0 引 言
塔康系统根据斜距、方位和高程量测估计目标位置,采用滤波技术后可提高估计精度。由于塔康系统的量测相对目标状态是非线性的,因此要解决非线性量测下的滤波跟踪问题。针对该问题有几种技术途径:扩展卡尔曼滤波(extented Kalman filter, EKF)、无味滤波(unsented Kalman filter, UKF)[1]、粒子滤波(particle filter, PF)[2]和量测转换(converted measurements Kalman filter,CMKF)等[3]。EKF将非线性函数在状态预测值附近展开,舍弃高阶项后滤波计算;虽然简单直观,但滤波精度不高。UKF对状态模型做无味变换,再用变换后的估计量滤波以减小误差;其优势在于无需微分计算,依据非线性模型就能估计误差统计特性;但这种基于高斯假设的方法的估计性能还不够好,滤波效果受参数影响较大。PF通过寻找一组在状态空间传播的随机样本粒子,对后验概率密度函数进行逼近,以样本均值代替积分操作以获得状态的最小方差估计;该方法对非线性滤波问题有很强解决能力,但计算量大,实时性差。量测转换方法提出较晚,但因为计算量小、精度高而受到广泛关注。
量测转换将非线性量测表达成直角坐标系的伪线性形式,并估计转换误差统计特性后滤波跟踪,该方法针对雷达目标跟踪产生诸多成果:文献[3]提出从极坐标系或球坐标系转换到直角坐标系中有一个加性的量测转换偏差,需做去偏处理,并估计出偏差大小和去偏误差协方差矩阵,称为去偏量测转换。文献[4]得出量测转换偏差的本质是乘性的且依赖于角度误差特性,并扩展到量测噪声对称非高斯分布的情况,提出无偏量测转换方法。文献[5]指出文献[4]存在转换兼容问题,提出修正无偏量测转换方法。文献[6]指出前述方法的缺陷,提出最佳线性无偏估计(best linear unbiased estimation, BLUE)器。文献[7]对非线性滤波方法(EKF、UKF、CMKF)比较后得出BLUE滤波器在计算量和跟踪性能上最佳的结论。量测转换还用于导航[8]、测角定位、测斜距变化率定位[9-10]以及多雷达定位中[11-15]。
综上可见,现有非线性滤波方法中量测转换的性能较好,其中BLUE滤波性能最佳[7],因此研究塔康中的BLUE滤波器实现。研究发现,塔康中的BLUE滤波器大多数情形下跟踪良好,但目标从地面站上空过顶时,即强非线性量测下,量测方程容易失效,导致状态估计不能收敛。下文分析塔康系统中量测转换误差的统计特性,估计BLUE滤波模型参数,用高程量测补偿的方法解决其在强非线性量测下的滤波发散问题。
1 基于量测补偿的自适应BLUE
本节分析塔康中各坐标轴的量测转换误差特性,估计BLUE滤波模型参数,针对目标从地面站上空过顶时的量测失效问题,通过对高程量测补偿的方法予以克服,提出一种自适应BLUE滤波方法。
1.1塔康系统量测模型及误差分析

(1)
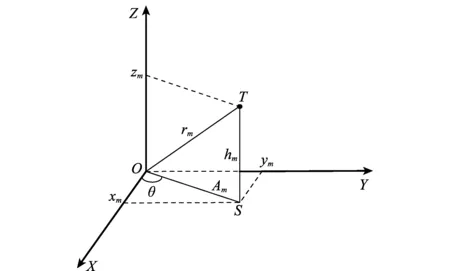
图1 塔康导航系统量测示意图
将方程组式(1)的非线性量测转换到直角坐标系,有zk。
(2)
式中,Am为rm在XOY平面的投影,为简化计算,先分析Am的误差统计特性。
(3)

(4)
(5)
(6)

(7)
(8)

1.2基于高程补偿的BLUE算法模型
推导BLUE模型参数前,先简要介绍BLUE估计,它基于线性无偏最小方差准则,用于目标跟踪时,有
(9)
(10)
式中

对于线性系统,其状态方程为
(11)
(12)

针对出现的不合理量测,常规做法是舍弃无效量测,递归到下一时刻滤波估计,但容易导致滤波发散。为克服该问题,采取以下措施:BLUE滤波前根据目标当前位置,判断rm>hm的出现概率,如果概率太低,则在高程量测加入偏置ϖh,使rm>hm出现概率增大,量测方程合理。另外要指出的是:补偿斜距量测也可以达到同样效果,但补偿高程的方法得到的表达式最简单。已知斜距r和高程h的情况下,rm>hm的概率为
(13)

(14)

(15)
对照组患者有效率为33.3%(10例),进步率为40.0%(12例),无效率为26.7%(8例),治疗总有效率为73.3%(22例);实验组患者有效率为66.7%(20例),进步率为30.0%(9例),无效率为3.3%(1例),治疗总有效率为96.7%(29例)。实验组患者治疗效果高于对照组患者,组间比较;差异有统计学意义(x2=6.405,P<0.05)。
(16)
(17)
式中
(18)

(19)
(20)

(21)
由式(8)得到
(22)
结合式(18)计算S11
S11中与真实状态x、y、z有关的量都用预测值代替,即
基于以上近似,计算S11近似值为
类似的得到其他元素的估计为
至此得到BLUE滤波模型中所有参数。
1.3自适应BLUE算法流程

(23)
(24)
(25)
塔康中BLUE算法滤波流程如图2所示。
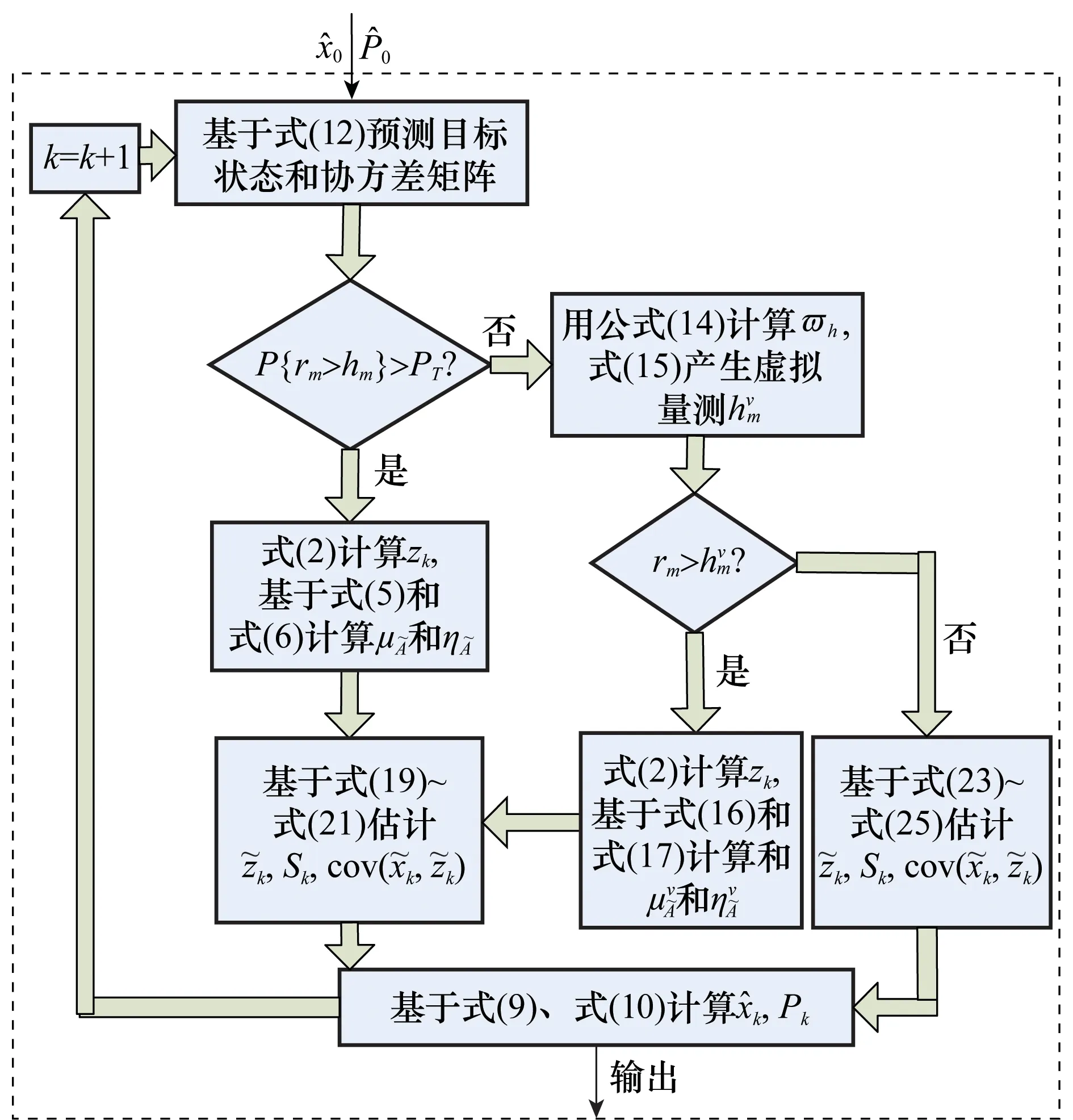
图2 自适应BLUE滤波流程
2 仿真实验与分析
为验证所提算法的效果,以经典BLUE滤波器和量测转换Kalman滤波器(converted measurement Kalman filter, CMKF)为参考检验性能。3种算法对远场目标的跟踪性能相似,因此仅测试对近场目标的跟踪性能,具体设置如下:地面站位于原点,目标起始位置均值(-8,0.2,5)km,标准差(20,20,20)m,起始速度均值(80,0,0)m/s,标准差(2,2,2)m/s。假设目标运动中高度变化不大,沿各坐标轴的过程噪声设置为(0.3,0.3,0.03)m/s2。斜距量测精度100 m,高程精度80 m,方位精度0.01。概率阈值PT=97.5%,置信区间ρT=1.96。采样周期1s,仿真时长200s,仿真500次的结果如图3所示。图3(a)是仿真中各时刻无效量测出现概率分布图。图3(b)和图3(c)是算法位置和速度跟踪误差对比。除以上参数,归一化估计误差均方值(averagenormalizedestimationerrorsquared,ANEES)[6]也是评估算法置信度的重要指标,ANEES为1时,滤波误差和估计协方差阵匹配,滤波一致性最好。图3(d)是算法ANEES对比图。
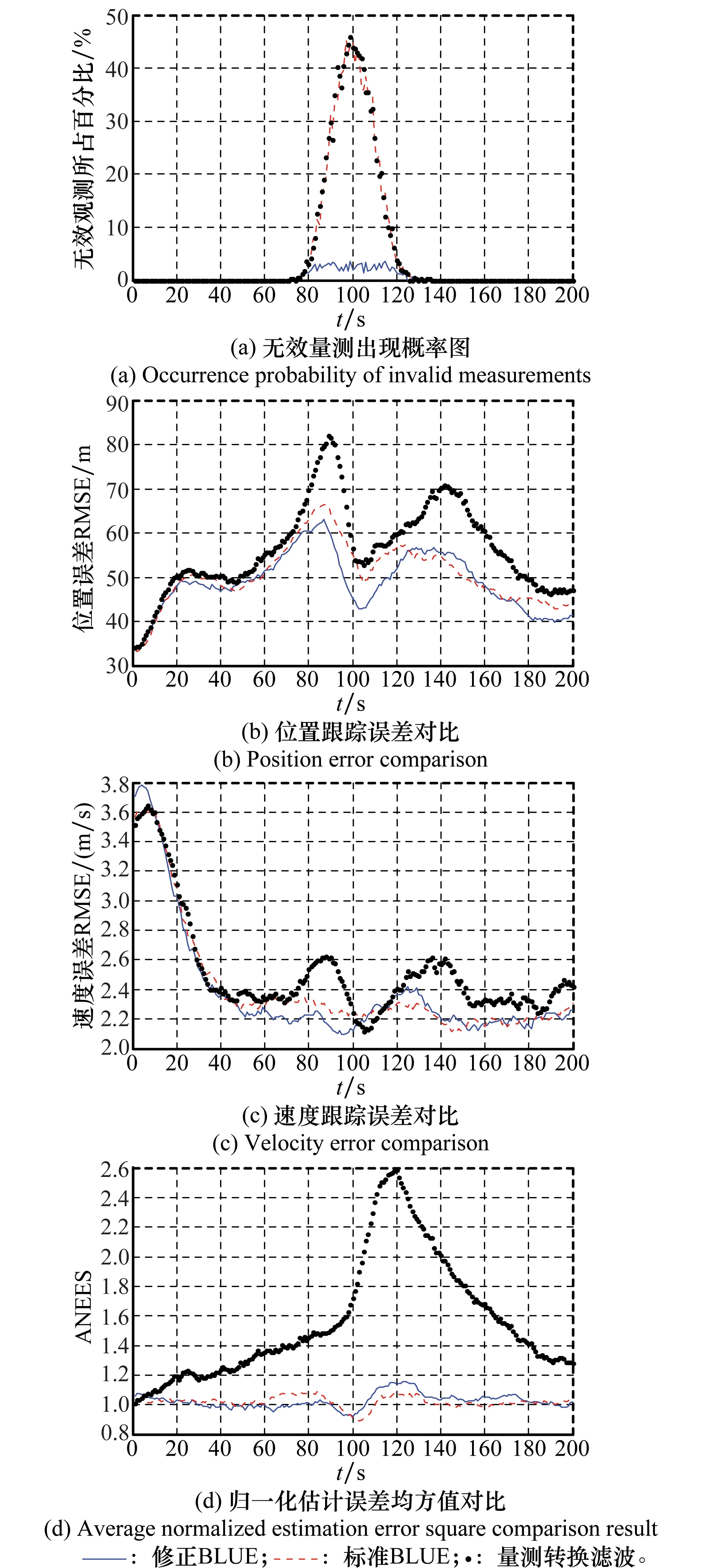
图3 场景1的跟踪仿真结果
在跟踪过程的中段,目标以较大的概率从地面站上空飞过,此时容易出现无效量测。图3(a)可见,目标位于地面站顶部时,BLUE算法得到的无效观测的概率接近50%,而修正BLUE算法通过高程量测补偿大大降低了无效量测的出现概率(约为2.5%,这与设置的概率阈值吻合)。由图3(b)和图3(c)中可见,无效量测转换为有效量测后,显著提高目标过顶时的跟踪精度,另外由图3(d)可见,修正BLUE算法的滤波一致性也很好(约等于1)。
为考察所提算法在不同状态噪声下的跟踪性能,场景2中,其他条件不变,将沿各坐标轴的过程噪声增大一个量级,设置为(1,1,0.1)m/s2,仿真500次的相关结果如图4所示。
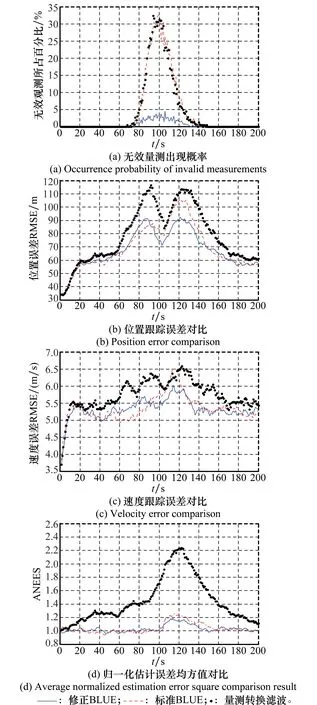
图4 场景2的跟踪仿真结果
由场景2仿真结果可见,增大状态噪声后,修正BLUE滤波器在跟踪过顶目标时(即强非线性量测条件下)的估计精度和置信度等指标高于其他方法,证明算法有较好的鲁棒性。除了估计精度和稳健性,计算复杂度也是性能评测所关心的指标,3种算法在奔腾双核4 GHz计算机上,Matlab 7.11环境中蒙特卡罗仿真500次的运行时间分别如下。
由表1结果可见,修正BLUE滤波器每次跟踪约需0.13 ms,计算量比标准BLUE高20%,比CMKF高60%,但滤波性能优于两者;其他非线性方法(如UKF、PF)虽然性能较好,但计算量相比BLUE和CMKF会有量级上的差异[11],因此修正BLUE滤波方法的综合表现优异,有很好的自适应性和实时性。
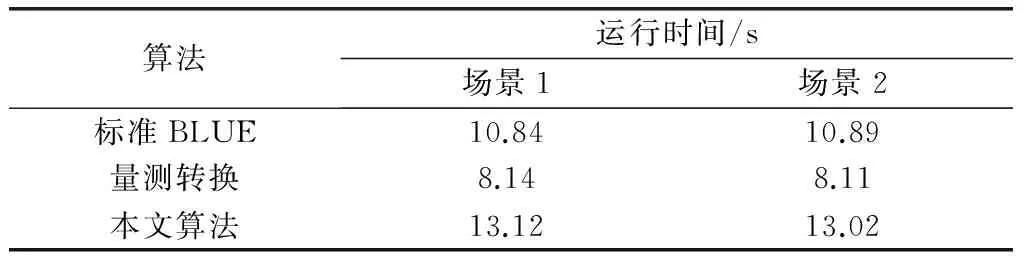
表1 各算法仿真500次的运行时间对比
3 结 论
BLUE滤波方法在雷达、声呐等系统中已经得到应用,但在其他导航或定位系统中尚未推广。本文分析塔康导航系统的误差源和量测转换误差特性,推导出BLUE滤波模型参数,通过高程量测补偿的方法克服无效量测出现时的估计发散问题,实现一种稳健高效的滤波方法。与其他非线性滤波方法的仿真对比表明,修正BLUE滤波器在不同状态噪声水平下对目标稳健跟踪,在强非线性量测下的估计精度较高,且实时性较好,有广阔的应用前景。
[1] Julier S J, Uhlmann J K. Reduced sigma point filters for the propagation of means and covariances through nonlinear transformations[C]∥Proc.oftheAmericanControlConference, 2002:887-892.
[2] Wang F S, Lu M Y, Zhao Q J, et al. Particle filtering algorithm[J].ChineseJournalofComputers,2014,37(8):1679-1695.(王法胜,鲁明羽,赵清杰,等.粒子滤波算法[J].计算机学报,2014,37(8):1679-1695.)
[3] Lerro D, Bar-Shalom Y. Tracking with debiased consistent converted measurements vs. EKF[J].IEEETrans.onAerospaceandElectronicsSystems, 1993, 29(3):1015-1022.
[4] Mo L B, Song X Q, Zhou Y Y, et al. Unbiased converted measurements for tracking[J].IEEETrans.onAerospaceandElectronicsSystems, 1998, 34(3):1023-1027.
[5] Duan Z S, Han C Z, Li X R. Comments on unbiased converted measurements for tracking[J].IEEETrans.onAerospaceandElectronicsSystems, 2004, 40(4):1374-1377.
[6] Zhao Z L. Best linear unbiased filtering with nonlinear measurements for target tracking[J].IEEETrans.onAerospaceandElectronicsSystems, 2004, 40(4):1324-1336.
[7] Katkuri J R, Jilkov V P. A comparative study of nonlinear filters for target tracking in mixed coordinates[C]∥Proc.ofthe42ndSoutheasternSymposiumonSystemTheory, 2010: 202-207.
[8] Bordonaro S V, Bias P W. Elimination in tracking with converted position and Doppler measurements[C]∥Proc.ofthe51stIEEEConferenceonDecisionandControl, 2012:4089-4094.
[9] Bordonaro S V,Yaakov Bar-Shalom P W, Unbiased tracking with converted measurements[C]∥Proc.oftheIEEERadarConference, 2012:741-745.
[10] Spitzmiller J N. Tracking with spherical-estimate-conditioned debiased converted measurements[C]∥Proc.oftheIEEERadarConference, 2010:134-139.
[11] Sheng H, Wang J G, Wang L M, et al. Application of converted measurements Kalman filter in TACAN navigation[J].JournalofSignalProcessing, 2015,31(1): 34-38.(盛琥,王金根,王立明,等. 量测转换卡尔曼滤波在塔康导航中的应用[J].信号处理, 2015,31(1): 34-38.)
[12] Bordonaro S, Willett P, Bar-Shalom Y. Decorrelated unbiased converted measurement Kalman filter[J].IEEETrans.onAerospaceandElectronicsSystems, 2014:50(2): 1431-1444.
[13] Zhou G J, Pelletier M, Kirubarajan T, et al. Statically fused converted position and Doppler measurement Kalman filters[J].IEEETrans.onAerospaceandElectronicsSystems,2014:50(1):300-318.
[14] Mao Y H, Li X R, Duan Z S. Unbiased measurement model conversion for tracking with multiple radars or sonar[C]∥Proc.ofthe31stChineseControlConference, 2012: 897-903.
[15] Sheng H, Zhao W B, Wang L M, et al. Maneuvering target tracking algorithm based on converted measurement and input estimation[J].SystemsEngineeringandElectronics, 2015,37(1): 31-36.(盛琥,赵温波,王立明,等. 基于量测转换与输入估计的机动目标跟踪算法[J].系统工程与电子技术, 2015,37(1): 31-36.)
Application research of altitude compensation based BLUE algorithm in TACAN
SHENG Hu, WANG Jin-gen, CHEN Zhi-ping, CAO Yan, ZHAO Wen-bo
(Unmanned Aerial Vehicle Department, Army Officer Academy, Hefei 230031, China)
Target position can be located with tactical air navigation (TACAN) system’s range, azimuth and altitude measurements, but the location precision is unfavorable because of large measurement errors. For the purpose of decreasing location errors, the implementation of the best linear unbiased estimator (BLUE) filter in the TACAN system is investigated. After building the measurement model of target positioning and analyzing the statistics characteristic of converted measurement errors, a corresponding BLUE filter model is derived. To circumvent the possible occurrence of invalid measurements, an altitude compensation technique is proposed to decrease estimation errors in strong nonlinearity cases. Simulation comparisons with other classical algorithms show the adaptive BLUE filter can solve the measurement ineffectiveness problem and overcome filter divergence effectively for short-range target tracking, thus proving its superiority over others in robustness and efficiency.
tactical air navigation (TACAN) system; best linear unbiased estimation; nonlinear filtering; converted measurements
2015-11-05;
2016-02-27;网络优先出版日期:2016-06-07。
国家自然科学基金(61273001);安徽省自然科学青年基金(1208085QF109)资助课题
TN 966
A
10.3969/j.issn.1001-506X.2016.08.07
盛琥(1980-),男,讲师,博士,主要研究方向为卫星导航、无源定位、机动目标跟踪。
E-mail:tigersh_2000@aliyun.com
王金根(1972-),男,副教授,博士,主要研究方向为SAR成像技术。
E-mail:wjg1288@sina.com
陈治平(1967-),男,教授,博士,主要研究方向为无线电侦察。
E-mail:czp1967@sina.com
曹燕(1977-),女,讲师,硕士,主要研究方向为新型计算机控制系统与控制网络。
E-mail:cy961102@163.com
赵温波(1972-),男,副教授,博士,主要研究方向为目标跟踪理论。
E-mail:896355034@163.com
网络优先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20160607.1605.018.html