基于北斗CORS系统的海上钻井平台精确站桩导航系统的设计与开发
2016-08-11董光利潘红章黄华文
于 双, 董光利, 刘 壮, 潘红章, 黄华文
(上海普适导航科技股份有限公司,上海 201112)
基于北斗CORS系统的海上钻井平台精确站桩导航系统的设计与开发
于双, 董光利, 刘壮, 潘红章, 黄华文
(上海普适导航科技股份有限公司,上海 201112)
由于海洋环境的复杂性与不可预测性,海上石油平台站桩或拖船是一项相当艰难的作业。海上钻井平台精确站桩导航系统是针对上海外高桥造船有限公司的JU-2000E型石油钻井平台开发设计,利用北斗CORS系统实时获得平台厘米级精度的位置信息,为移动平台精确站桩提供了可靠保障。
精确站桩;北斗CORS;导航定位;海上钻井平台;坐标转换
随着人类深化油气资源的开发利用,油气勘探开发从陆地转入海洋。海上石油钻井平台上装有钻井、动力、通讯、导航等设备,以及安全救生和人员生活设施,是海上油气勘探开发不可缺少的手段。由于海上气候的多变、海上风浪和海底暗流的破坏,平台在钻井过程中引起移位需要重新复位、就位或在深水海域进行拖船是相当复杂的作业,涉及到操纵性、耐波性以及水动力理论等多个学科,是一个系统工程[1],而且拖航过程中极其易受设备、航道、天气等多方面因素的影响,同时考虑到工作人员的过度疲劳、紧张及其他人为原因,提供准确及时的导航定位技术服务对降低作业成本、提高安全性起非常关键的作用。
在GPS还没有成熟地应用到打桩定位的时候,主要是使用经纬仪交会等方法来确定桩的方位和坐标。由于采用的是交会的方法,需要两台或者多台仪器的协调,其计算复杂,且对仪器设站的位置也有很高的要求。钻井平台在水中会有一定的波动,因此,传统上的打桩定位工作的效率和定位的精度都不理想,而对于离岸较远的定位测量,经纬仪交会的角度和仪器安置的位置选择都受到了限制,没有办法达到很好的精度。
随着GPS定位技术的发展,实时载波差分定位技术不断成熟,为打桩定位提供了新的研究手段[2]。因此,近年来基于GPS RTK技术和基于网络RTK技术的打桩定位系统得到了发展和应用[3]。本系统使用了2套网络RTK设备并通过连接CORS网实时获得厘米级精度的位置信息,满足了定桩工程的高精度要求,并且实时监测拖航平台和船舶运行状况,可以及时定位平台及船舶位置,直观显示航向、航速、船舶距离等重要拖航信息,有效保证拖航过程中钻井平台在站桩或拖船过程中的安全。该系统的建成能够有效减小海上钻井平台拖船或定桩的操作复杂性,提高对海上钻井平台及船舶的现代化管理水平,及早发现隐患、最大程度地避免事故的发生。
1 北斗CORS系统
北斗连续运行参考系统(BD-CORS)是指利用网络RTK(实时动态差分)技术,将多个连续运行参考站组合而成的定位服务综合系统作为新一代的高精度地基增强系统,具有作业覆盖范围更广、定位精度更高、使用更方便等优势。从2012年起,我国的上海、重庆、河北等地的北斗CORS系统相继建成。北斗CORS系统的相继建成,不仅可以大幅提升北斗卫星导航系统空间信号精度,为用户提供厘米级甚至毫米级定位服务,而且可以满足测绘、国土、气象、城建等高精度行业用户的需求,同时,对于拓展北斗高精度应用领域、创新北斗高精度应用模式、推动北斗导航与位置服务产业化发展都具有重要意义[4]。BD-CORS的工作过程如图1所示[5]。

图1 CORS工作过程示意图
2 海上钻井平台精确站桩导航系统简介
海上钻井平台精确站桩导航系统是针对上海外高桥造船有限公司的JU-2000E型石油钻井平台[6]开发设计的,主要解决石油钻井平台如何在海中准确定位、精确打桩问题。该系统使用了2套网络RTK设备并通过连接北斗CORS网实时获得厘米级精度的位置信息,通过数学计算实时显示钻井平台的当前姿态及位置信息,并通过文字列表显示及语音播报助航系统为用户提供精确的导航信息;同时系统配备了电子海图,为用户航海提供了丰富的导航接口。经多次海试,系统为移动平台精确站桩提供了可靠保障。系统结构如图2所示。

图2 系统结构
3 海上钻井平台精确站桩导航系统中心软件的设计
3.1系统概况
海上钻井平台精确站桩导航系统是针对上海外高桥造船有限公司的JU-2000E 型石油钻井平台而开发设计的,利用北斗CORS系统实时获得平台厘米级精度的位置信息。JU-2000E 型平台基本上是1个三角形,其3个站桩分布在3个角上(见图3)。由于3个站桩是在平台上,而平台是浮在动态的水面上,要想能够在动态的水面上进行高精度的定位,还应考虑平台的姿态,因此,站桩导航系统需要具备平台的实时定位与定向功能。
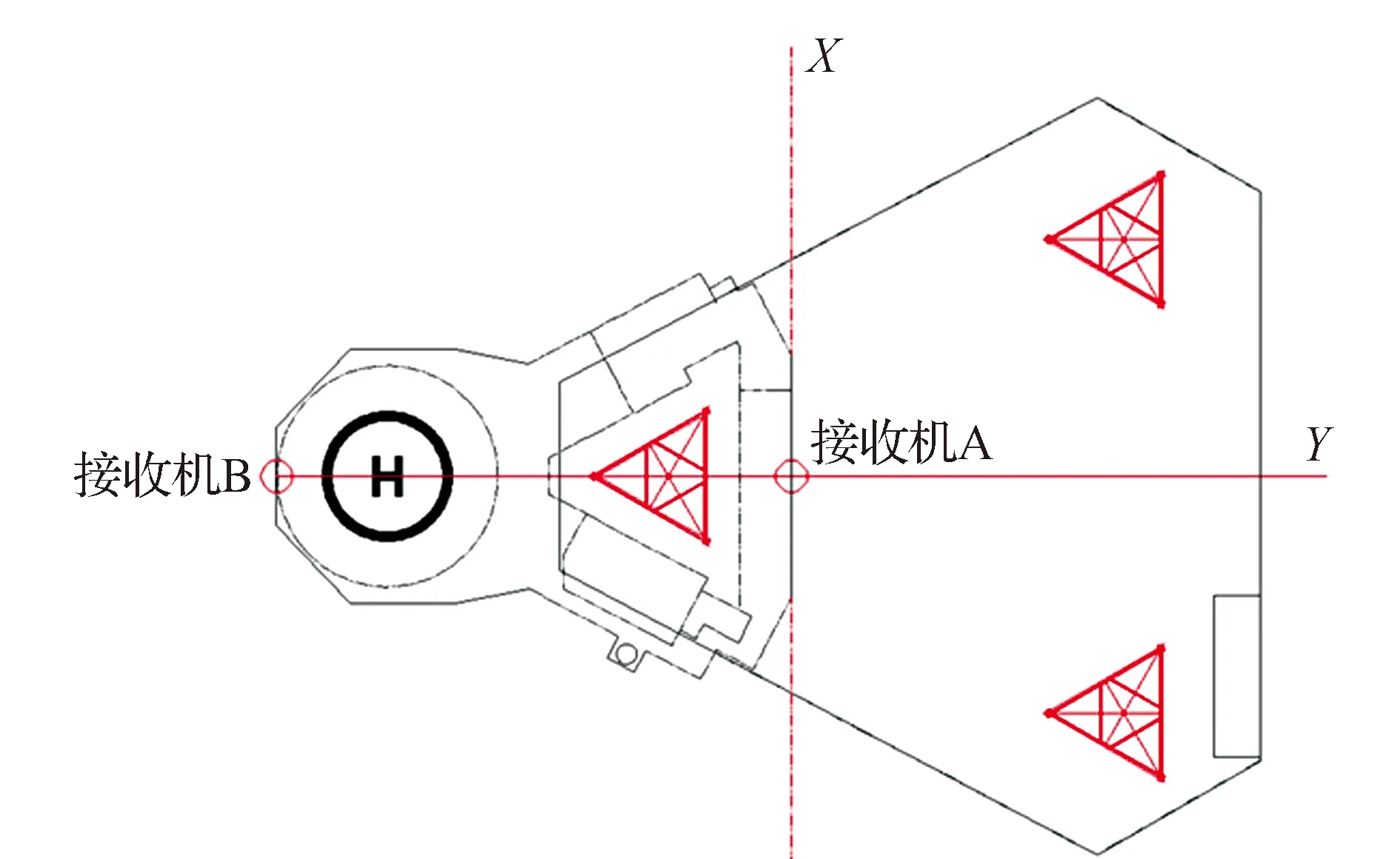
图3 JU-2000E 型平台示意图
3.2系统设计关键问题及解决策略
站桩导航系统主要实现两项功能:①实时确定平台艏向角;②实时确定3个桩点的测量坐标系坐标。在设备平台上,可以定义1个相对独立的平台坐标系,进而得到3个桩点及2个接收机设备安置点的平台坐标,同时,利用北斗CORS系统,实时得到2个接收机设备的测量坐标系坐标。
因此,本站桩导航系统需要解决的关键问题是如何实时进行平台坐标系与测量坐标系的转换,进而实时得到平台的艏向角及3个桩点的测量坐标系坐标。
1)测量坐标系。此处测量坐标系主要指高斯投影坐标系,如图4中XOY所示,以投影中央子午线与赤道的交点为原点,X轴与投影中央子午线重合,向北为正方向,Y轴平行于赤道,向东为正方向。
2)设备平台坐标系。设备平台坐标系为一独立坐标系,如图4中X′O′Y′所示,以平台中心线与平台底部的交点为原点,X轴与平台几何中心线重合,指向船艏向,X轴按顺时针旋转90°得到Y轴。
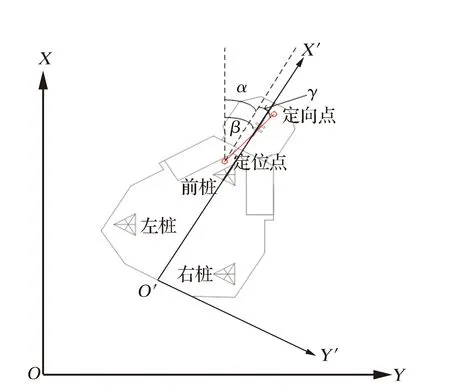
图4 坐标系示意图

(1)
在测量坐标系下,设定位点天线坐标为(xp,yp),定向点天线坐标为(xh,yh),3个桩点的坐标为(xi,yi),则从定位点到定向点在测量坐标系下的方位角
(2)
根据图4,可以得到平台坐标系与测量坐标系的夹角α(平台艏向角),
(3)
根据坐标系旋转变换,可以得到3个桩点的测量坐标系坐标

(4)
通过北斗CORS系统,可以实时得到定位及定向点在CGCS2000测量坐标下的坐标,利用式(3)、式(4),即可以实时得到平台的艏向及3个桩点的测量坐标系坐标。
3.3中心软件总体架构
系统总体架构如图5所示。 系统采用自上而下的总体规划和自下而上的应用开发的策略设计开发,在应用系统技术路线选择、主机系统选型、网络设备、线路、带宽、传输协议选择,以及重要系统节点的内部结构设计时,都需要权衡现有需求和未来发展需要之间、现有技术的可获得性和未来技术发展方向之间的矛盾。

图5 系统总体架构
3.4系统功能
该系统的软件主要包括电子海图、精确站桩导航和导航信息展示三大功能。
1)电子海图功能:集成了我国全部海域的海图数据显示,实现了海图的放大、缩小、平移、测距、居中等基本功能,可以展示目标的动态航迹线信息。
2)精确站桩导航功能:对实时测量数据进行处理,将测量的点位数据实时换算为桩点位置信息,通过绘图技术将定位结果实时展现出来,给用户直观的显示,动态绘制出移动桩与目标桩的位置关系。
3)导航信息展示功能:对艏向、航向、流向角、偏航、航速、平台相对目标脚印前后偏的距离、平台相对目标脚印中心线左右偏的距离以及各桩与相对目标脚印的距离等信息进行直观数值展示。
4 海上钻井平台精确站桩导航系统的实现
4.1软件开发环境
软件开发基于.NET平台,采用完全的面向对象语言C#编写,引用二维GIS开发采用电子海图引擎,底层采用Access进行数据库存储和集群。软件支持Windows 2000、XP、Vista和Windows7等系统,软件需要在Access2007环境下运行。
4.2软件主要模块
根据软件功能需求分析,该软件包含电子海图模块、精确站桩导航模块、参数及桩点设置模块以及定位信息展示模块。4个模块之间的关系如图6所示。
1)电子海图模块:加载海图数据至海图模块,在屏幕汇总绘制电子海图,可以对海图进行放大、缩小、平移等操作。
2)精确站桩导航模块:对测量设备上报的实时位置信息进行解析并处理实时计算3个桩点的位置坐标,并将实时计算的桩点位置信息绘制在屏幕上。
3)参数及桩点设置模块:设置系统参数并保存至注册表,设置首脚印、左脚印及右脚印的坐标值及方向角等信息并保存至本地数据库。
4)定位信息展示模块:对艏向、航向、流向角、偏航、航速、平台相对目标脚印前后偏的距离、平台相对目标脚印中心线左右偏的距离以及各桩与相对目标脚印的距离等信息进行直观数值展示。

图6 模块关系图
4.3软件界面
软件界面如图7所示。

图7 软件界面
本系统的软件界面包括标题栏、菜单栏、工具栏、定位信息显示栏、站桩显示栏和导航状态栏。其中,定位信息显示栏为图6左侧的显示框,能够实时显示导航信息、点位质量和设备实时信息;站桩显示栏包括电子海图和精确站桩导航两种显示模式,以便于用户在不同空间尺度里查看平台地理位置;导航状态栏显示站桩过程中桩离“首脚印”的位置,便于平台操作人员精确停泊。
拖航和插桩过程中,船长根据实时显示的图像和相关数据指导拖轮作业。当平台站桩进入设计位置范围圈后,范围圈呈绿色,此状态下表明平台已到位。
5 结束语
目前,海上钻井平台精确站桩导航系统已多次利用上海长江口北斗CORS 系统成功将JU-2000E型自升式钻井平台导航至预定位置,顺利完成站桩定位作业,完全满足了定桩工程的高精度要求,并且全部过程实现实时可视化显示,直观清晰,有效保障了钻井平台在站桩或拖船过程中的安全。该系统的建成能够有效减小海上钻井平台拖船或定桩的操作复杂性,提高对钻井平台的现代化管理水平,同时拓展了北斗CORS高精度的应用领域,积极推动了北斗导航与位置服务产业化的发展。
[1] 蒋鹏,秦敏.北斗卫星导航系统在海上石油钻井平台拖船定位中的应用[C]//杨义先.2011年全国通信安全学术会议论文集.北京:国防工业出版社,2011.
[2]仲树明,姚连壁.无反射棱镜全站仪打桩定位的方法与数学模型[J].测绘工程,2008,17(1):24-27.
[3]杨帆,林吉兆,谢义林,等.基于GPS-RTK的海上打桩远程监控系统设计[J].测绘工程,2014,23(12):76-80.
[4]侯倩,蒋勇,李东俊.构建北斗地基增强系统 打造智慧城市基础设施[J].卫星应用,2014(11):29-33.
[5]连续运行卫星定位综合服务系统建设与应用[M].北京:科学出版社,2009.
[6]白庆虹.为海上石油钻井平台提供厘米级定位[N].中国水运报, 2014-07-04(001).
[7]林国利,张文言,於永东,等.上海北斗连续运行参考站系统(SHBD-CORS)的建设与精度测试[J].测绘通报,2013(11):136-137.
[8]刘宇宏,陈龙,王亚鸣. 基于北斗的连续运行卫星定位综合服务平台设计及其应用[J].上海航空,2014,38(1):37-43.
[责任编辑:刘文霞]
Design and realization of offshore drilling platformprecise standing system based on BD-CORS
YU Shuang,DONG Guangli,LIU Zhuang,PAN Hongzhang,HUANG Huawen
(Shanghai Ubiquitous Navigation Technology Co.,Ltd., Shanghai 201112,China)
Because of the complexity and unpredictability of the marine environment, the standing or drafting of the offshore oil platforms is a very hard work. Designed for the JU-2000E oil drilling platform of Shanghai Waigaoqiao Shipbuilding Co., Ltd., the offshore drilling platform precise standing system guarantees the accuracy of the offshore drilling platform standing based on the location information in real time provided by BD-CORS.
precise standing; BD-CORS; navigation and positioning; offshore drilling platform; coordinate transforming
10.19349/j.cnki.issn1006-7949.2016.11.014
2015-08-04
于双(1989-),女,硕士.
TN967.1
A
1006-7949(2016)11-0072-04