一种RSSI不同特征值融合的提取算法
2016-08-11薛卫星邱卫宁花向红
薛卫星,邱卫宁,花向红,张 伟
(1.武汉大学 测绘学院,湖北 武汉 430079;2.武汉大学 灾害监测与防治研究中心,湖北 武汉 430079)
一种RSSI不同特征值融合的提取算法
薛卫星1,2,邱卫宁1,2,花向红1,2,张伟1,2
(1.武汉大学 测绘学院,湖北 武汉 430079;2.武汉大学 灾害监测与防治研究中心,湖北 武汉 430079)
室内WIFI指纹位置定位一般取RSSI的平均值作为其定位特征值,但考虑到室内环境的复杂性和动态性,平均值并不能准确地反映RSSI信号特征值。通过对不同外界干扰因素下RSSI的概率分布特征研究的基础上,提出一种RSSI不同信号特征值融合指纹定位算法。给出算法实现的步骤,并且在稳态环境下和动态环境下分别进行指纹定位在线端的数据采集实验。实验结果表明:RSSI不同信号特征值融合指纹定位算法的定位精度优于均值指纹定位算法的定位精度。
RSSI信号特征值;概率分布特征;特征值融合;WIFI指纹定位算法
随着信息技术的迅猛发展,室内定位技术得到快速发展。在各种室内定位技术中,基于RSSI(基于接收信号强度定位技术)[1]的位置指纹定位方法因无需添加任何硬件设备[2]和无需知道AP的位置信息及准确的信道模型[3]等优点,已经成为室内定位的主流定位方法。该方法一般分为离线和在线两个阶段[4-6]。离线阶段通过测量定位区域所有指纹参考点的RSSI信号并提取信号特征建立Radio Map的位置指纹数据库[7-8];在线阶段得到定位点的信号特征,并和位置指纹库匹配找出最相近的一组或几组指纹参考点数据,然后采用一定的定位算法得到定位点的定位结果[9],由此可见,无论是离线阶段还是在线阶段,RSSI信号特征值的选取[10]都是非常重要的工作,然而人们对RSSI信号特征的研究并不多[11]。一般选取RSSI信号特征的平均值作为其定位特征值,考虑到室内环境的复杂性和动态性,信号传播过程中往往存在多路径传播和非视距传播[12-13],RSSI信号特征值的平均值进行指纹定位有一定的局限性[14-16]。因此,本文从无线信号的传播原理出发,提出一种基于RSSI信号强度概率、众数和均值等特征值融合[17]的提取算法,给出RSSI不同信号特征值融合提取算法的指纹定位实现的步骤,通过实验说明算法的可行性。
1 基于指纹定位的RSSI不同信号特征值的融合算法
1.1RSSI的概率分布特性
通常,RSSI信号特征的确定主要采用基于信号强度均值的算法或基于信号强度概率的算法。由于室内环境的复杂性和动态性,RSSI信号传播的过程中往往受到墙体的折射、反射,门窗的折射、反射、衍射,人行走动的遮挡、吸收等因素的影响,从而出现多路径传播和非视距传播。这样就使得RSSI信号特征的分布呈现不同的特征,一般有4种情况,如图1所示。
在稳态环境下,假设没有多径干扰信号的影响,则信号概率分布会呈现正态分布,即图1中的居中分布。当存在多径干扰信号的影响时,如果多径干扰信号与视距传播的信号相差较大且两者都比较稳定时,则信号概率分布会形成以这两个信号真值为中心的双峰分布(见图1)。当多径干扰信号与视距传播的信号相差不大时,若多径干扰信号干扰较弱,信号概率分布会呈现以视距传播的信号为峰值的左偏分布;而当多径干扰信号占主要部分时,信号概率分布则呈现以多径干扰信号为峰值的右偏分布。
1.2基于指纹定位的RSSI不同信号特征值融合的提取算法
基于RSSI[18]的位置指纹定位方法无论是离线阶段还是在线阶段,RSSI信号特征值的选取至关重要[19]。由RSSI信号特征的概率分布特性分析可知,室内定位环境复杂的情况下,无论采用基于信号强度概率的众数算法,还是采用基于信号强度均值的算法,都不能确切的反映RSSI信号强度的真值。为此,本文提出基于指纹定位的RSSI不同信号特征值融合的提取算法,其算法流程如图2所示。
具体的算法步骤如下:
1)将信号强度从小到大排序,并求出每个信号强度分布对应的百分比概率P(RSSIi)、中位数、众数和均值。
2)对信号强度概率分布进行曲线拟合并对拟合曲线进行峰值检测,若有两个及两个以上峰值,取曲线拟合峰值中最大的作为信号强度特征值。
3)若只有一个峰值,则用式(1)计算其概率分布的偏态系数Cs。
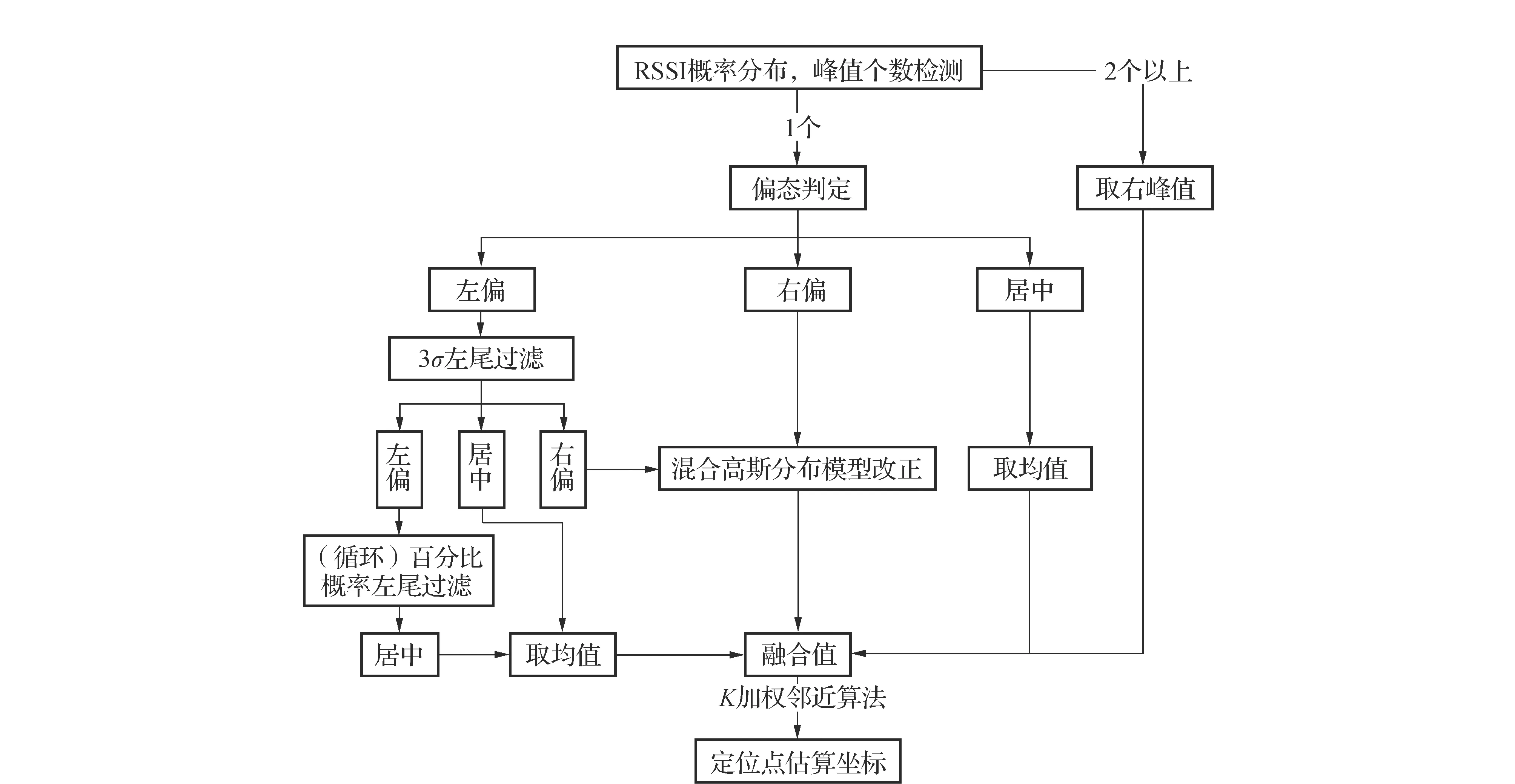
图2 RSSI特征值融合算法流程
(1)

4)若-1≤Cs≤1,则判定该信号强度分布居中,取均值作为其信号特征值。
(2)
(3)
最后按式(4)求融合算法观测值RSSIronghe,作为其信号特征值。
RSSIronghe=
(4)
式中:n是观测值RSSI中非重复的RSSI的个数;N同式(1),N′同式(2)。

(5)

然后根据Di的大小找到与定位点物理欧式距离最近的K个指纹参考点,并对这K个指纹参考点的位置坐标按式(6)赋予不同的权重系数ωi。
(6)
最后将这K个指纹参考点位置坐标的加权和作为定位点的定位结果,如式(7)所示。
(7)
式中:(x,y)是定位点的坐标;(xi,yi)是指纹点的坐标。
2 实验及效果分析
为了考察基于指纹定位RSSI不同信号特征值融合的提取算法的效果,分别在武汉大学测绘学院102实验室大厅(静态环境:指该区域内的所有物体和人在实验期间没有或基本没有位置和状态的变化)和408机房(动态环境:指该区域内的物体或人在实验期间有明显的位置或状态的变化)进行了算法定位实验,如图3所示。图3中,实验室102(静态环境)有4个AP,408机房(动态环境)有5个AP,△代表指纹点,○代表定位点。实验时,手机分别在实验室102和机房408采集AP的信号强度,采用1 s的采样率,每个时段采集数据8 min。需要说明的是:为便于分析,本文假定距离定位点最近的4个指纹点已经筛选出来,然后再进行定位。由于不同手机接收AP信号强度具有差异性,故实验中所有数据的采集均采用同一个手机进行。另外,为了防止某个手机的系统偏差影响定位结果,实验中用3个手机在稳态环境下进行重复实验,确保无系统偏差后用其中一个手机做动态环境下的实验。
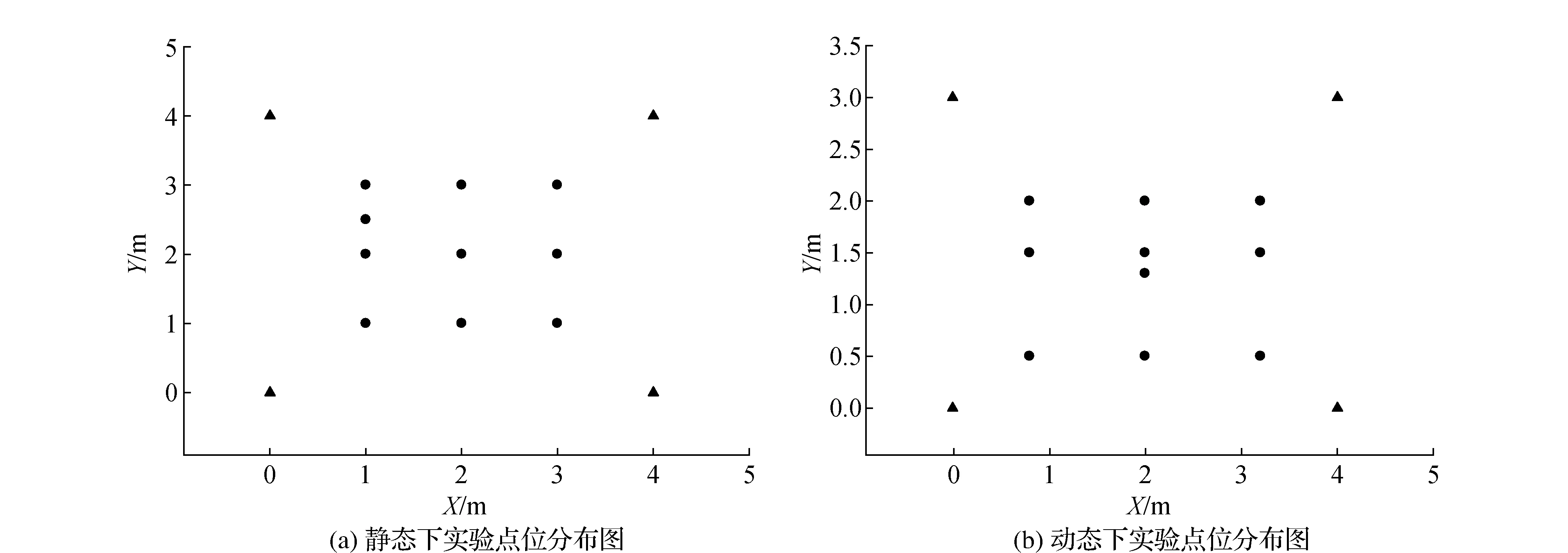
图3 实验点位分布示意图
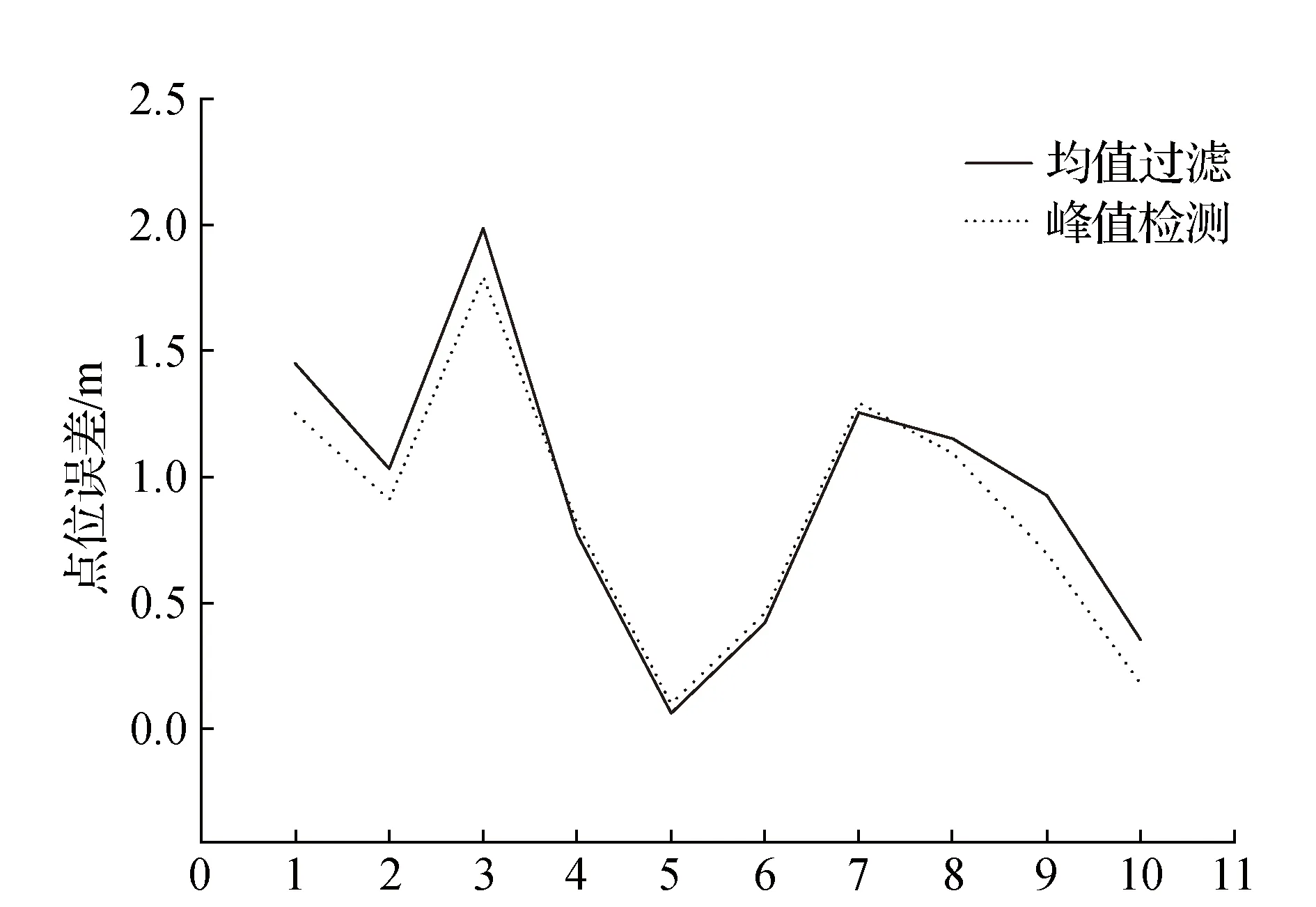
图4 峰值检测后定位结果精度改善图
2.1最佳RSSI特征值的确定
在RSSI特征值融合算法定位处理过程中,为得到最佳的RSSI特征值,需要处理峰值检测、偏态系数阈值设定、左偏改正算法和右偏改正算法等技术问题。
峰值检测:多峰值时选取最左边的峰值作为融合值;单峰值时仍采用平均值作为融合值。图4给出动态环境下手机1的10组数据峰值检测前后定位结果精度的比较。
由图4可知,经过峰值检测后,有6组数据定位结果明显改善。考虑到在信号强度的概率分布中,双峰分布占到不少的一部分,而双峰分布的左峰值与平均值相差一般较大,所以含有双峰分布信号数据组的定位精度会明显改善,未含有双峰分布信号数据组的定位结果则基本保持不变。
偏态系数阈值:不同的偏态系数阈值对定位结果影响不一样。选取稳态环境下手机1的7组数据,分别设置不同的偏态系数阈值,其定位结果见图5。
由图5可以看出:当偏态系数阈值小于1时,7组数据的定位结果基本没有变化;当偏态系数阈值大于1时,7组数据的定位结果均开始逐渐变差。因此,本文将偏态系数阈值设为1。
左偏改正算法:左偏改正算法是基于众数的,而目前整数dB的众数区分度不高,故左偏改正时先后采用两种左尾过滤法来逼近众数的真值。由1.1中对信号强度概率分布特性的分析知,左偏分布时多径干扰信号较弱,仍然呈现以视距传播的信号为峰值的分布,所以只需分析左偏改正算法对定位结果改善的整体趋势。因此,本文采用均值算法和左偏改正算法定位结果的点位误差的差值来分析。定位数据采用动态环境下手机1的数据,结果见图6。
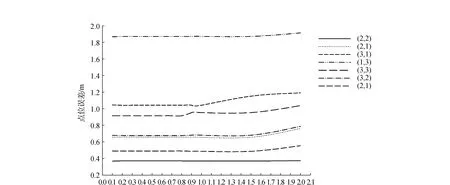
图5 不同偏态系数阈值对定位结果的影响图
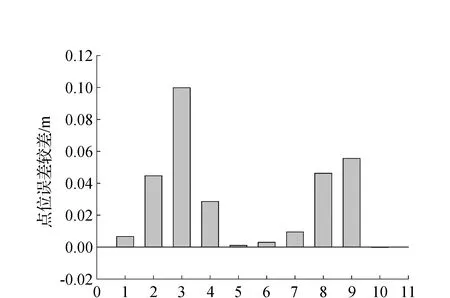
图6 左偏改正后定位结果改善趋势图
由图6可知:经过左偏改正后,定位结果精度基本都得到改善,该整体改善趋势与预计相符。
右偏改正算法:右偏改正算法是基于混合高斯分布模型的均值和方差,首先根据算法步骤(6)中的经验公式确定多径干扰信号的均值与方差,进而求得视距信号均值。采用稳态环境下的2组手机数据分析,结果见图7。
由图7可以看出:经过右偏改正算法的定位精度优于平均值的定位精度;不同位置定位结果的改善程度不同。由于不同位置的具体环境不同,多径干扰信号对视距信号的干扰强弱也就不同,所以右偏改正算法对不同位置定位结果的改善程度也有大有小。
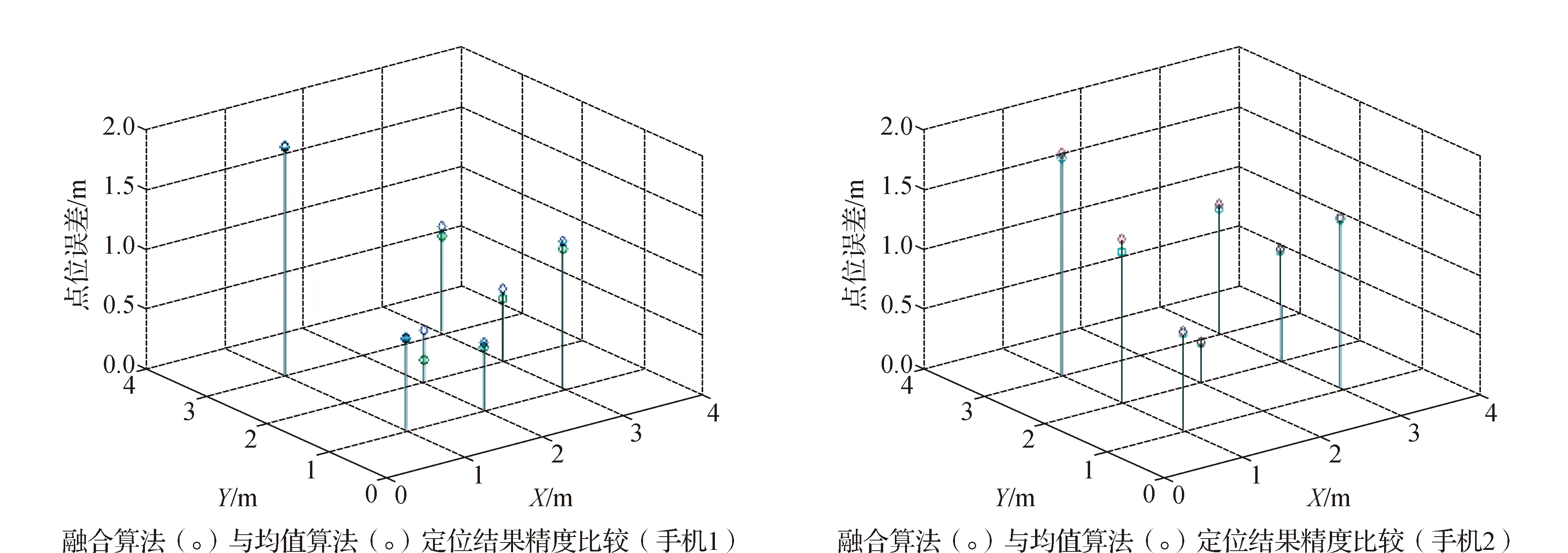
图7 右偏改正算法和均值算法定位结果比较
2.2RSSI特征值融合定位效果分析
考虑到双峰分布和右偏分布对定位结果的影响较大,表1以动态环境下手机1的数据为例列出峰值检测和右偏判定的结果。

表1 动态环境下RSSI概率分布含双峰分布或右偏分布情况

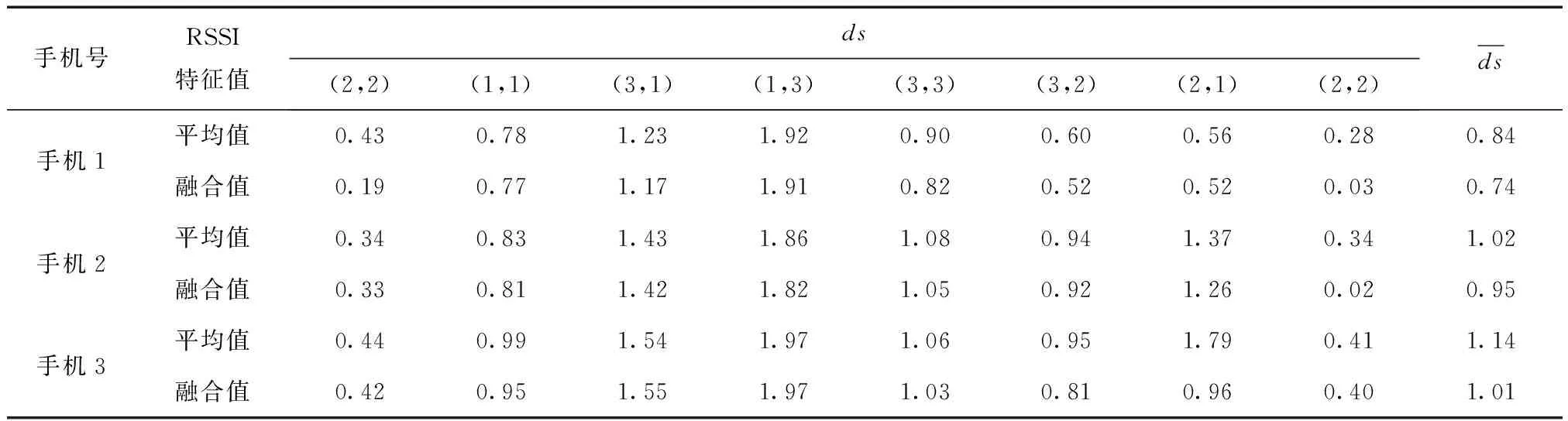
表2 稳态环境下RSSI不同信号特征值定位点位误差及精度 m

表3 动态环境下RSSI不同信号特征值定位点位误差及精度 m
3 结束语
在对不同外界干扰因素下RSSI信号特征的概率分布特性分析的基础上,提出一种基于RSSI不同信号特征值融合的指纹定位算法,并分别通过稳态和动态环境下实验,结果表明:该算法的定位精度优于均值指纹定位算法的定位精度,说明本文算法的可行性和正确性。并且该融合算法定位具有以下特点:
1)对RSSI信号强度峰值检测和筛选,多峰值时选取最左边的峰值作为融合值;
2)考虑到外界干扰一般使信号强度变弱,采用两种左尾过滤法来逼近众数的真值,基于众数实现左偏改正;
3)将混合高斯概率分布函数固定两个参数用于右偏改正,简化运算。这些特点使得该融合算法定位具有很好的环境适用性。
[1]PARK Do Woo,PARK Joon Goo.An Enhanced Ranging Scheme using WIFI RSSI Measurements for Ubiquitous Location[C].First ACIS/JNU International Conference on Computers,Networks,Systems,and Industrial Engineering,Jeju Island,Korea,2011.
[2]林巍凌.基于GIS的室内定位约束与优化算法[J].测绘工程,2016,25(10):10-16.
[3]LIU Xing-Chuan,ZHANG Sheng,ZHAO Qing-Yuan.A real-time algorithm for fingerprint localization based on clustering and spatial diversity[C].2010 International Congress on Ultra Modern Telecommunications and Control Systems and Workshops,Moscow,Russia,2010.
[4]SUROSO Dwi-Joko,PANARAT C,SORAKSA P.Location fingerprint technique using fuzzy C-means clustering algorithm for Indoor localization[C].IEEE Region 10 Annual International Conference,Bali,Indonesia,2011
[5]SHARMA C,WONG Yew,FAI S.Access point placement for fingerprint-based localization[C].12thIEEE International Conference on communication Systems,Singapor,Singapor 2010.
[6]LIU Xing-Chuan,ZHANG Sheng,LU Heng-Hui.Method for efficiently constructing and updating radio map of fingerprint positioning[C].2010 IEEE Globecom Workshops,Miami,FL,United states,2010.
[7]KILANI M B,RAYMOND A J,FRANS Ois Gagnon,et al.RSSI-based Indoor Tracking using the Extended Kalman Filter and Circularly Polarized Antennas[C].2014 11th Workshop on Positioning,Navigation and Communication,Dresden,Germany,2014.
[8]CHEN Yiqiang,YANG Qiang,YIN Jie,et al.Power-efficient access-point selection for indoor location estimation[J].IEEE Transactions on Knowledge and Data Engineering.2006,18(7):877-888.
[9]LIU Xing-Chuan,ZHANG Sheng,ZHAO Qingyuan.A novel approach for fingerprint positioning based on spatial diversity[C].3rdInternational Conference on Advanced Computer Theory and Engineering,Chengdu,China,2010.
[10] MALYAVEJ V,KUMKEAW W,AORPIMAI M.Indoor Robot Localization by RSSI/IMU Sensor Fusion [C].2013 10th International Conference on Electrical Engineering/Electronics,Computer,Telecommunications and Information Technology,ECTI-CON,Krabi,Thailand,2013.
[11] KAEMARUNGSI K,KRISHNAMURTHY P.Analysis of WLAN’s received signal strength indication for indoor location fingerprinting[J].Pervasive and Mobile Computing,2012,8(12):292-316.
[12] YANG Yuan,ZHAO Yubin,KYAS M.A Grid-scan Maximum Likelihood Estimation with A Bias Function for Indoor Network Localization[C].2013 International Conference on Indoor Positioning and Indoor Navigation,Montbeliard-Belfort,France,2013.
[13] LIU Hung-Huan,LO Wei-Hsiang,TSENG Chih-Cheng.A WiFi-Based Weighted Screening Method for Indoor Positioning Systems[J].Wireless Pers Commun,2014,(1)79:611-627.
[14] 李勇军,左娟.GPS动态定位自适应卡尔曼滤波算法研究[J].测绘工程,2012,21(4):29-32.
[15] 毛大智,贺黎明.廉价GPS测量精度及稳定性分析[J].测绘与空间地理信息,2015,38(12):74-76.
[16] 荆昊,James PINCHIN,Chris HILL.采用无线信号测距加权的室内协同定位[J].导航定位学报,2014,2(2):31-39.
[17] 史建青,焦明连,董春来.信标GPS定位信号与测深仪水声信号的融合技术研究[J].测绘工程,2011,20(2):18-20.
[18] 刘春燕,王坚.基于几何聚类指纹库的约束KNN室内定位模型[J].武汉大学学报(信息科学版),2014,39(11):1287-1292.
[19] 苏天祥,文援兰,朱俊.双自适应因子滤波算法[J].测绘学报,2015,44(1):26-31.
[责任编辑:张德福]
An extraction algorithm of different RSSI characteristic value fusion
XUE Weixing1,2,QIU Weining1,2,HUA Xianghong1,2,ZHANG Wei1,2
(1.School of Geodesy & Geomatics,Wuhan University,Wuhan 430079,China;2.Hazard Monitoring & Prevention Research Center,Wuhan University,Wuhan 430079,China)
The mean value of RSSI is usually taken as its truth value in WIFI fingerprint indoor positioning.However,the mean value of RSSI does not accurately reflect the real value of RSSI considering a variety of factors for RSSI measurements in the indoor environment.This paper proposes a fusion algorithm based on different RSSI signal characteristic values after concluding the probability of RSSI signal characteristics under different disturbance factors.The performance on WIFI indoor positioning of this value is compared with that of the mean value under steady-state environment and dynamic environment.The experimental results demonstrate that there is a better accuracy for the fusion filtering algorithm value than mean value.
characteristic value of RSSI;probability distribution;characteristic value fusion;WIFI fingerprint localization algorithm
10.19349/j.cnki.issn1006-7949.2016.11.013
2015-07-10;
2016-01-03
国家自然科学基金资助项目(41374011;41174010)
薛卫星(1990-),男,硕士研究生.
P228
A
1006-7949(2016)11-0065-07