具迟延特性的热工对象模糊控制方法研究
2016-08-10田亮
田亮
(中国能源建设集团天津电力建设有限公司 天津市 300000)
具迟延特性的热工对象模糊控制方法研究
田亮
(中国能源建设集团天津电力建设有限公司 天津市 300000)
调节热工对象时,通常是典型的大惯性、大迟延过程。在具体生产实践中,工况变化导致对象的不确定性和实效性,而传统控制模式是在精确模型控制基础上,因模型不精确、控制算法固定而难以事先控制复杂系统之目的。本文将对模糊控制基本原理进行分析,并在此基础上就具迟延特性的热工对象模糊控制方法,谈一下笔者的观点和认识,仅供参考。
热工对象;迟延性;模糊控制;研究
智能控制中的模糊控制,对于对象模型表现出一定的不确定性,采用模糊控制方法比较合适。一般的模糊控制器,控制大惯性和大迟延系统,效果并不理想,需结合其他方法对控制效果进行适当改进。模糊控制模式比较接近人类的思维,更加清楚、直观,而且计算量也相对较小,实用性强。
1 模糊控制基本原理
对于模糊控制而言,其与通常系统分析中的定量方法存在着本质上的不同,具体表现出以下几个方面的特点:①利用语言变量完全取代了传统的数学变量;②利用模糊条件语句描述变量函数关系;③采用模糊算法对复杂关系进行刻画。通过模糊控制,将人类的知识和经验有效地转化成控制措施,针对模型中难以建立的系统控制,并对其提供较为简便的方式。模糊控制设备,根据知识经验理论和数据,对隶属函数、管控规则进行分析确定。从这一点来看,在无需明确精确数学模型的情况下,只要能够提供人员知识经验以及操作数据,即可规划设计管控方案。实际上,模糊控制对象在发生变化时,也可达到满意管控性能,而且鲁棒性较强,如图1所示。
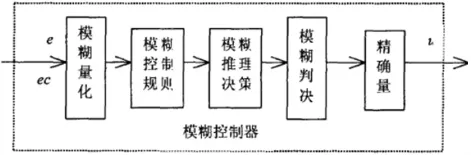
图1 模糊控制器结构示意图
1.1 模糊量化
所谓模糊化,即将基础变量中的确定量有效地变成基础变量的模糊集,常规管控是在系统输出值、设定值比较的基础上,获得偏差;控制器再结合该偏差,决定对系统如何进行有效控制。通常情况下,也可根据偏差值变化情况,做出综合判断。事实上,偏差值、偏差变化,均可作为精确输入值,需先将其有效地转换成模糊集合中的隶属函数。对于任何输入值而言,均对应于模糊集合。当向模糊控制器输入精确量时,应当先将精确量有效地转换成模糊隶属函数,即模糊量化。计算机在利用模糊控制算法模糊控制过程中,将输入量自基本论域转换至模糊集论域过程中,需将输入量与量化因子相乘。基于量化因子映射,将精确量的变化范围有效地映射至论域之中,然后再将论域中的输入数据,直接转换成术语,并在此基础上建立模糊集合。采用该种方式,即可将输入精确量有效地转换成利用隶属函数表示的模糊变量数值;用检测所得的输入量,作为控制规则条件,采用模糊控制规则推理,即实现了模糊化。
1.2 去模糊过程
对于模糊量而言,其去模糊过程,即将基础变量论域模糊集变换成基础变量论域确定值。基于控制视角,由模糊推理所得的模糊集合,难以输出给被控制对象控制;若模糊控制输出、被控对象存在着人为中介,那么可将推理结果采取语言或其他形式显示。在此过程中,人对该输出进行解释,以决定某数值输出给被控对象以控制。如果被控对象、控制输出之间不存在人为中介,那么应当由模糊控制器根据某算法从推理结果中得出适合的数值,向被控对象输出,即推理结果解释问题。基于模糊推理所得的输出模糊隶属函数,是在不同方法利用的基础上找到的典型精确值,并将其视为控制量。
2 智能化控制
实践中可以看到,常规的控制模式已经无法有效适应热工对象控制,更多的研究和技工人员,将一系列智能化控制方法应用在热工对象控制上,并且用智能化的管控方法去处理控制对象迟延问题。由于热工控制对象的迟延性、惯性,研究者们将迟延对象控制系统采用智能控制方法优化改进,获得智能型预估控制器,以此来有效控制热工对象。以smiht为例,该种预估控制为时滞预估补偿算法,即通过对对象进行动态估计,用预估模型补偿之。从应用实践来看,Smiht预估控制系统,可将时滞环节有效地移至闭环外,大大提高控制品质和效率。值得一提的是:实际对象与估计模型之间存在误差时,控制品质就会严重受损,甚至会出现发散现象,对外部扰动特别敏感,严重影响鲁棒性。从一方面来讲,普通的Smiht预估控制系统,无法在实际应用过程中到以真正的实现。对此,研究人员将智能控制方法结合Smiht预估控制器使用,比如用模糊算法增益控制器比例等,从而实现自整定之目的;同时,通过动态化的对模型增益进行调整,可使模型输出、控制对象输出无限接近。从仿真结果来看,该方法可以有效改善和优化Smiht的预估补偿管控动态性能,对于减少整个系统以来性、提高抗干扰能力,具有非常重要的作用。
实践中,有研究人员还提出了有限脉冲响应模型基础上的预测函数控制算法,同时还提出了模糊自适应预测函数控制措施,该方法简单使用,能够动态适应工况变化。针对超临界直流锅炉而言,结合主汽温对象特点,优化设计预测函数一比例串级控制体系。通过典型工况条件下的试验可知,采用串级(PFC-P)控制措施的主汽温系统,动态性能非常好。在此过程中,为了能够有效克服因负荷变化而对主汽温系统产生的影响,建议选用AFPFC措施,这样可以确保系统负荷适应性。当负荷出现明显升降时,主汽温度可保持在±5℃以内,控制量也能够平稳变化。锅炉过热汽温,建议采用PDI改进控制措施,将智能积分有效地应用PDI计算方法,并将其应用到大迟延对象,以解决实践中存在的问题。
同时,可采用复合控制措施,控制锅炉主汽温度,这种复合控制措施,可在相对较大误差范围之内,基于Fuzyz进行有效管控,这样可以有效提高调节品质;并且在小误差情况下,实现二者之间的相互切换,利用跟踪技术避免干扰;模糊控制器,采用的是全论域自带调整模糊控制措施。不仅可以模糊规则的优化控制,又可以简化寻优过程,从而减少模糊控制规则,使算法更加方便,容易调整参数。经仿真试验,该方法可以有效提高控制品质。对于神经网络而言,其对信息数据的处理、加工以及存储和应用等,具有一定的优势。比如,其可对信息数据进行分布式存储,并行处理、推理信息,并且对信息数据进行自学习、自组织处理。基于此,实践中可以以任意的精度逐渐接近非线性函数,并且实现在线以及离线学习之目的,有较强的容错性。在迟延控制系统中的应用,主要是考虑其可逐渐逼进时滞动态性,仅需采用输出和输入样本,即可训练网络。从系统组成来看,其控制结构并不复杂,对数学模型没有精确的要求,在现代热工对象控制过程中,得以广泛的应用。
基于神经网络,对系统滞后时间进行辨识,通过神经网络输入样本区间的改变,利用输出期望值、实际值间的误差平方以及突变,对非线性系统滞后时间进行辨识,这是一种全新的估计滞后时间的方法。有研究者提出,可利用神经元自适应预测控制器,实时控制大惯性、大惯性对象。其中,利用的主要是模型加权函数,对时滞进行确定,结合预控来有效克服变时滞。通过实验发现,该种方法有其切实可行性,鲁棒性也非常的强。实践中,将模糊控制、神经网络以及预测控制和Smiht预估控制结合起来,以此来有有效发挥其试点,并且形成全新的控制措施,对热工对象有效控制。
3 结束语
总而言之,热工对象非常复杂,作为一种多变的控制对象,其影响因素也非常的多,而且各系统间祸合互,所以控制对象时,必须全面考虑,采取综合措施。
[1]丁卉.模糊控制器在热工对象中的应用[D]北电力大学,2013.
[2]郄力博.一类纯迟延系统的模糊控制系统设计与应用研究[D]华北电力大学,2012.
TK32
A
1004-7344(2016)09-0325-02
2016-3-10
田亮(1985-),男,甘肃天水人,工程师,本科,研究方向为热控。