一种线状要素深度简化方法
2016-08-10乔俊军胡冯伟
乔俊军,胡冯伟
(武汉大学测绘学院,湖北武汉430079)
一种线状要素深度简化方法
乔俊军,胡冯伟
(武汉大学测绘学院,湖北武汉430079)
提出了一种线状要素深度简化的方法,该方法将线状要素简化分解成若干子过程,每个子过程通过弯曲识别与分类,并利用具有一致性和自适应的阈值组合实现了线状要素的规模化处理。试验表明,该方法能适应于不同制图因子——线宽、类型、比例尺要素的简化,相比于Douglas等简化方法更接近于人工处理的结果。
线状要素;深度简化;弯曲分类;阈值组合;线宽
随着由库到图的制图技术越来越成熟,新版《国家普通地图集》采用国家1∶100万基础地理信息数据库作为制图数据进行缩编成图。然而,从百万比例尺缩编成几百万,甚至是千万比例尺的地图,不可避免地面临着线要素综合问题。其中,线要素简化是线要素综合的核心问题。
目前,国内外已有很多关于线要素简化方面的研究。其中较著名的有Douglas算法[1],该方法通过判断曲线节点与直线的距离是否小于给定的阈值,从而达到数据简化的目的,如果小于,则剔除节点。为了弥补Douglas算法在简化过程中损失的信息,Tong等利用最小二乘理论,提出了一种不确定性过程模型,避免了简化后曲线长度、面积等信息的失真[2]。Li等受启发于自然界中所观察到的自然综合过程原理,提出了一种自适应线状要素综合算法,该方法利用最小可见目标尺寸作为曲线细节信息删除与否的阈值,以达到简化的目的[3]。针对Li-Openshaw算法的不足,朱鲲鹏等利用局部极大值点[4]、黄志坚等利用角点检测器筛选出的关键点[5],将曲线在特征点处分段,每段再用Li-Openshaw进行简化,从而更好地保持了曲线整体形状。
近年来,学者们探寻出了一条利用弯曲识别来达到线要素简化的新思路。艾廷华利用约束的Delaunay三角网模型提出了一种曲线弯曲特征的深度层次结构,实现了大弯曲套小弯曲层次结构的表达[6]。毋河海通过多次应用矢量叉积乘积,结合曲线光滑原理,以寻找曲线的最或然拐点[7]。罗广祥利用坐标非单调性变化产生线状地图要素弯曲的认知模型,并通过顺序比较坐标大小来识别地图弯曲[8]。郭庆胜从视知觉的角度,综合利用曲线的极值点、拐点、迂回曲线分界点、方向扰动奇异点来识别弯曲[9]。操震洲以曲线轴线作为弯曲划分基准,通过递归方式层次化提取不同方向、不同区间上的弯曲[10]。
不置可否,目前所见文献对线要素简化有一定的研究意义,但现有处理方法所获得的简化结果较难令人满意,以至于在制图过程中,人们往往更愿意采用手工为主的方式对线要素进行简化,原因有以下几点:
1)就制图而言,线要素简化不仅要减少节点,保持弯曲特征,还要考虑地图出版印刷等问题。
2)针对不同类型、比例尺的线要素,阈值较难保证统一,从而导致方法的适用性不高。
3)仅利用弯曲识别较难获得满意的结果,还需要对弯曲进行分类,因为不同类型的弯曲处理方式不同。
综上所述,如何提出一种能够处理多类型线要素,且能与手工处理结果相接近的简化方法,已成为《国家普通地图集》迫切需要解决的问题[3]。为此,本文提出一种深度简化方法,该方法将线要素简化分解成若干子过程,各个子过程通过弯曲识别与分类,并根据自适应或符合视觉认知的阈值进行组合,处理不同类型的弯曲。
一、弯曲分类与简化阈值
1.弯曲分类
假设两线段组成的弯曲为一级弯曲,三线段组成的弯曲为二级弯曲。
由于一级弯曲是最底层弯曲,具有普遍性,因此一级弯曲的可分类性不高,本文重点在于二级弯曲的分类。根据二级弯曲中是否存在拐点,可将其分为两大类。其中拐点存在与否可利用式(1)来判断[7],即

结合下文中的弯曲夹角θ,又可将每个大类分成4小类,具体见表1。

表1 二级弯曲分类
令Q( P1,P2,P3,P4)为弯曲识别函数,P为输入的节点,其值域为Q1~Q8。由表1可知,任何节点数大于4的线要素都是由二级弯曲组合而成的。
2.简化阈值
为了判断二级弯曲在何种情况下需要处理,阈值是个不可避免的问题,其定义如下:
1)弯曲口长L[11]:一级弯曲中,首尾节点之间的距离,如图1所示。
2)弯曲深度H[11]:一级弯曲中,中间节点到首尾节点所在直线的距离,如图1所示。
3)弯曲夹角θ:一级弯曲中,两线段的夹角,其中0〈θ〈180°,如图1所示。

图1 一级弯曲上的简化阈值
4)拐线长度L′:二级弯曲中间线段的长度。
5)平均线段长度¯L:曲线上所有线段的平均值。
6)平均弯曲夹角θ:曲线上弯曲夹角的平均值。
7)弯曲重叠度D:因线宽导致的曲线在转角处产生重叠与相邻线段的差值,如图2所示,其中

式中,W为线宽。需要说明的是二级弯曲的拐线有两个弯曲重叠度。
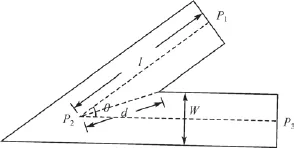
图2 弯曲重叠度
二、线要素深度简化
简化目标:在保证弯曲特征的情况下,使原始线要素禁锢在结果线要素的线宽范围内,且尽可能使原始线要素处于结果线要素的中间,如图3所示,黑色为原始线要素。灰色为简化结果线要素。

图3 简化目标
简化思想:如果仅将线要素分成一级弯曲来处理,很难得到满意的结果,因为一级弯曲之间的关联性很强,处理一级弯曲时,会对其相邻的一级弯曲造成破坏。虽然二级弯曲之间的关联性较弱,但如果将弯曲对象仅局限于单个的二级弯曲,也较难获得满意的结果,因为在线要素节点环境非常复杂的情况下,往往存在单个二级弯曲的处理是模糊的情况,即使人工都难以决策。而且在线要素简化的过程中,线要素上各个一、二级弯曲的尺寸是逐渐变大的。
基于此,深度简化方法应运而生。该方法将线要素的简化过程剥离成多个子过程,每个子过程处理不同类型的弯曲,且每个子过程的阈值组合随着弯曲类型的不同而不同。具体如下:
1.重点剔除
输入节点P1、P2,计算点间距l12,若l12〈Δl,则删除节点P1或P2,并进行迭代,直到没有新点删除为止。
2.第1层简化
考虑到当比例尺相差较大时,如从百万数据库到千万比例尺图的缩编过程,线要素上的节点数量是非常巨大的,因此需要首先对一级弯曲进行处理,为下层简化减轻负担。假设输入节点 (P1,P2,P3),计算弯曲深度、弯曲口长和弯曲夹角,利用如下阈值组合,判断是否处理当前弯曲

式中]表示“并”,下同。式(3)表明,当弯曲深度小于Δh、弯曲口长小于dl,且弯曲夹角小于平均弯曲夹角时,一级弯曲近似于线段,故删除节点P2。
迭代上述过程,直到没有新点删除为止。如图4(a)所示。
3.第2层简化
该层简化主要对独立的二级弯曲进行处理。假设输入节点 (P1,P2,P3,P4),首先利用式(2)计算该二级弯曲首尾两线段的弯曲重叠度D1、D3,以及拐线的弯曲重叠度D21、D22,然后根据二级弯曲的类型,进行如下处理

式中{表示“或”,下同。由式(4)可知,当弯曲类型为Q2~Q8时,判断D21、D22是否小于0.1 mm。若两者都小0.1 mm,说明拐线很短,在视觉上会被相邻线段淹没掉。此时,若l12、l34均小于平均点间距¯L,那么移动节点P2,并删除节点P3。
若弯曲类型为Q5~Q8时,判断D1、D21是否小于0.1 mm。若相邻两线段的弯曲重叠度均小于0.1 mm,那么在视觉上两线段近似重合。此时,需要删除节点P2。同理,当D22、D3均小于0.1 mm时,删除节点P3。
由于线要素的节点环境对于计算机而言是未知的,在某些情况下,式(4)的判断会无效,但是拐线在视觉上仍然会被淹没掉,主要原因是L′〈W,因此在这种情况下,需根据式(5)来处理弯曲

式中,n为显著系数。由式(5)可知,当存在L′〈W的情况时,首先判断l12与l34的关系,如果l12明显比l34长,那么删除节点P3,反之删除节点P2。如果两者长度对比不明显,就移动节点P2,并删除节点P3。迭代上述过程,直到没有新点删除为止,如图4(b)所示。
4.第3层简化
实际上,第2层简化能够对大部分独立二级弯曲进行处理,但在某些情况下,独立二级弯曲的处理是模糊的,即使人工都难以判断,因此需要对独立二级弯曲进行延伸,以作为辅助判断来决定当前二级弯曲处理方式。
假设输入节点 (P0,P1,P2,P3,P4,P5),(P1,P2,P3,P4)为当前二级弯曲,P0、P5为延伸点,从而将独立的二级弯曲延伸为3个相邻的二级弯曲。
1)若当前弯曲类型为Q1,弯曲的处理方式见式(6)

式(6)表明,为了控制弯曲的处理长度,保证曲线特征,首先比较l12、L′及第1个弯曲口长L1与平均点间距¯L的大小,若都小于¯L,继续判断Q(P0,P1,P2,P3)的弯曲类型,若为Q1,则直接移动节点P2,同时根据l12与l34的关系,移动节点P3;若当前二级弯曲的前后相邻的二级弯曲为Q2和Q5~Q8,则删除节点P2。同理,比较L′、l34及第2个弯曲口长L2与¯L的关系,进行同样过程的处理。最后,若拐线较短,且二级弯曲首尾线段较长,即比较l12、L′、l34与¯L的大小,若符合式(6),则移动节点P2,并删除节点P3。
2)若当前弯曲类型为Q2时,弯曲的处理方式见式(7),需要说明的,弯曲类型Q3与Q2处理方式一致。

根据式(7),首先判断l12、L′、L1与¯L的关系,若均小于¯L,则判断Q( P0,P1,P2,P3)是否为Q1,若是,则移动节点P1和P2。为处理节点P3,还需判断l34与L¯的大小,若l34小于¯L,可认为l34很短,则根据两节点坐标平均值移动节点;否则,认为l34较长,直接根据坐标平均值会影响简化的效果,故利用l34与L¯的比值关系来移动节点P3。若Q( P0,P1,P2,P3)为Q3,则先判断D1和D21是否小于0.1 mm,若是,则删除节点P2;否则,为剔除无意义的突起弯曲,再判断l01是否小于¯L,若是,则删除节点P2。
3)若当前弯曲类型为Q4时,弯曲的处理方式见式(8)。
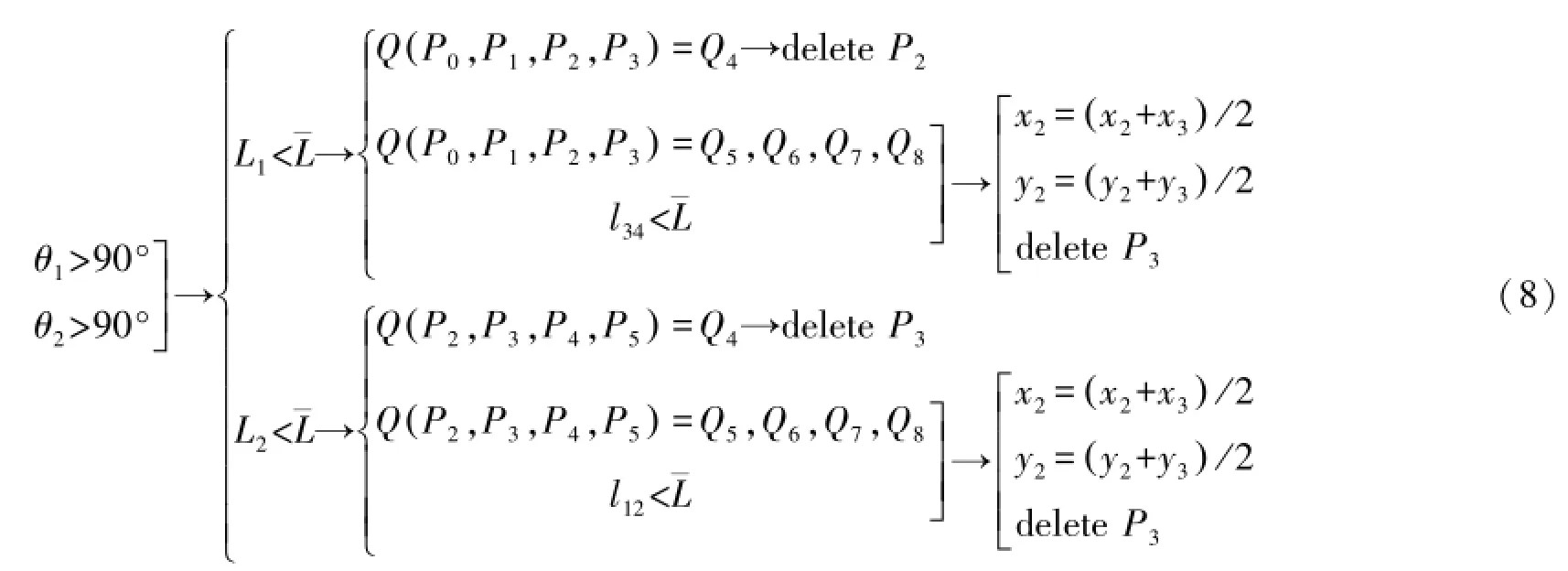
根据式(8),首先判断L2是否小于L¯,若是,再判断Q( P0,P1,P2,P3)是否为Q4,若是,则删除节点P2。若Q( P0,P1,P2,P3)没有拐点,且l34小于平均点间距,那么移动节点P2,并删除节点P3,当L2〈L¯时,弯曲的处理方式与L1〈¯L一致。
迭代上述过程,直到没有新点删除为止。如图4(c)所示。
需要说明的是:
1)在线要素深度简化的过程中,平均点间距L¯的作用是控制弯曲的长度,保证弯曲特征。
2)式(5)—式(8)中,部分节点有的根据坐标均值来移动,有的根据线段比值关系来移动。主要是考虑到当线段明显较短时,可以直接用坐标均值的方式移动节点,而当线段明显较长时,如果用坐标均值的方式移动节点,会导致简化后的线段偏离原始线段,这就背离了上文阐述的“简化目标”,因此需要根据线段的比值关系来移动节点。有精度的。
2)对于式(3)中的Δh、dl的取值,根据图上最小可视距离[11]为0.3~0.6 mm。试验中将dl取值为0.3 mm。同时,考虑到线宽是线要素一个非常重要的制图因子,试验中将Δh取值为线宽的1/4。因此,当一级弯曲满足式(3)的阈值组合时,可用直线代替一级弯曲,达到简化的目的。
3)对于式(5)中的显著系数n,可取值为1.5,因为当线段A的长度大于线段B的1.5倍时,可视为线段A明显长于线段B。
4)弯曲重叠度的赋值,主要考虑到线段在视觉上是否会被淹没等情况。一般情况下取值为0.1,即当两线段间距小于0.1 mm时,可视为两线段重合。
5)其他阈值在简化过程中是自适应的,与平均点间距、平均弯曲夹角有关。
2.简化试验
试验数据来源于国家百万数据库。
1)同线宽不同比例尺下的深度简化试验,见图5、表2,线宽为0.2 mm,黑色细线为原始线要素。
图4中,黑色为原始线要素,灰色为各子过程简化后的线要素。
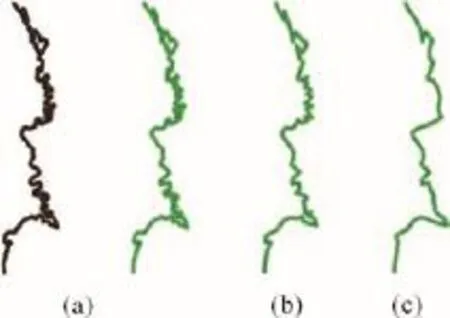
图4 深度简化过程
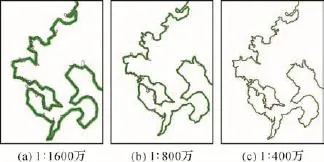
图5 不同比例尺线要素的深度简化

表2 简化后的节点对比
三、试验结果与分析
1.阈值赋值
1)对于重点剔除过程中的Δl取值,试验中将其赋值为0.000 1 mm。需要说明的是,Δl取值不固定,只要认为两点的点间距小于Δl,就视为重点即可,但该值一定不能为0,因为计算机的浮点计算是
2)同比例尺不同线宽的深度简化试验,见图6、表3,线要素的比例尺为1∶800万。
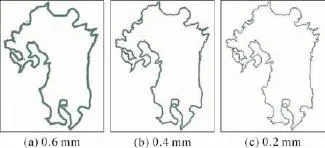
图6 不同宽度线要素的深度简化

表3 简化后的节点对比
3)不同类型要素的深度简化试验,如图7所示,包括岛屿、境界线、道路、海岸线。
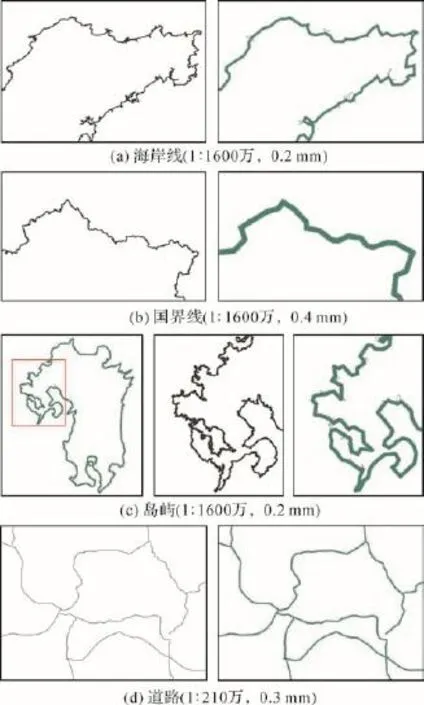
图7 不同型线要素的深度简化
4)与其他简化方法的对比试验,见图8、表4,线宽为0.2 mm,比例尺为1∶1600万。

图8 不同简化方法对比
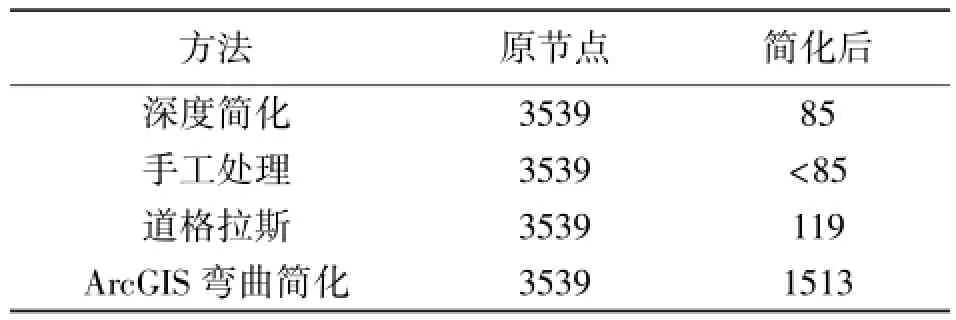
表4 简化后的节点对比
3.结果分析
1)根据图5和表2,在线宽相同的条件下,随着比例尺的增大,深度简化能够保留线要素更多的细节,相应的,线要素的节点也会增加;反之,会剔除多余弯曲,使节点更少。这与客观认识是相符合的,因为对同一要素而言,比例尺越大,范围就越大,有意义的信息就会越多,就越能看清要素的细节部分;反之,能看到的细节就越少。
2)根据图6和表3,在比例尺相同的情况下,随着线宽的减小,深度简化能够保留线要素更多的细节,相应的,线要素节点就会增加;反之,会剔除无意义细节,使节点更少。这与客观认识是相符合的,因为,线宽越小,弯曲之间的影响就越小,能够显示的细节就越多,反之,细节会被淹没。
3)根据图7,深度简化能够适应于多种不同类型的线要素简化。但各类型线要素的简化结果并非是相同的。其中,道路简化的效果最好,简化后,几乎不用人工再参与;相比较而言,海岸线与岛屿的简化结果就没有道路那么好,还需要人工检查与再编辑;境界线次之。主要原因是自然要素的边界无规律可循,节点环境非常复杂,而人文要素边界规律性较强,节点环境相对较简单。
4)根据图8和表4,深度简化的结果与人工的简化结果最接近,优于道格拉斯与ArcGIS弯曲简化所获得的结果。
四、结束语
本文提出了一种深度简化方法,该方法将简化过程剥离成数个子过程,每个子过程通过弯曲识别与分类,并利用不同的阈值组合来处理弯曲。试验证明,该方法充分考虑了线要素的制图因子——线宽,并针对不同比例尺、不同类型的对象都有很好的简化效果。同时,相比于其他简化方法,该方法的简化结果更接近于人工处理结果,基本实现了以计算机为主、人工为辅的目标,提高了制图效率。
为了进一步减少人工参与,提高要素尤其是自然要素简化的满意度,本文后续将会尝试对三级甚至更高级的弯曲进行分类与处理。
[1] DOUGLAS D H,PEUCKER T K.Algorithms for the
Reduction of the Number of Points Required to Represent a Digitized Line or Its Caricature[J].Canadian Cartographer,1973,10(2):112-122.
[2] TONG X,XU G.A New Least Squares Method Based Line Generalization in GIS[J].International Geoscience and Remote Sensing Symposium,2004(5):2912-2915.
[3] LI Z L.OPENSHAW S.Linear Feature’s Self-adapted Generalization Algorithm Based on Impersonality Generalized Natural Law[J].Translation of Wuhan Technical University of Surveying and Mapping,1994(1): 49-58.
[4] 朱鲲鹏,武芳,王辉连,等.Li-Openshaw算法的改进与评价[J].测绘学报,2007,36(4):450-455.
[5] 黄志坚,张金芳,徐帆江.关键点检测的线要素综合算法[J].中国图象图形学报,2012,17(2):241-248.
[6] 艾廷华,郭仁忠,刘耀林.曲线弯曲深度层次结构的二叉树表达[J].测绘学报,2001,30(4):343-348.
[7] 毋河海.数字曲线拐点的自动确定[J].武汉大学学报(信息科学版),2003,28(3):330-335.
[8] 罗广祥,祝国瑞,毋河海,等,坐标单调分析下地图曲线弯曲识别模型的研究[J],测绘通报,2005(10): 21-24.
[9] 郭庆胜,黄远林,章莉萍.曲线的弯曲识别方法研究[J].武汉大学学报(信息科学版),2008,33(6): 596-599.
[10] 操震洲,李满春,陈亮.曲线弯曲的多叉树表达[J].测绘学报,2013,42(4):602-607.
[11] 黄博华,武芳,崔仁健,等.保持弯曲特征的线要素化简算法[J].测绘科学技术学报,2014,31(5):533-537.
A Method of Deep Simplification for Line Features
QIAO Junjun,HU Fengwei
10.13474/j.cnki.11-2246.2016.0222.
P28
B
0494-0911(2016)07-0048-07
2015-09-17;
2015-11-02
乔俊军(1961—),男,高级工程师,主要从事地图学与地理信息工程教学及研究工作。E-mail:623083313@qq.com
引文格式:乔俊军,胡冯伟.一种线状要素深度简化方法[J].测绘通报,2016(7):48-54.