基于卫片的非序列无人机影像快速概略拼接方法
2016-08-10孙彦玮李语旻2
孙彦玮,李 浩,孙 丽,李语旻2
(1.河海大学地球科学与工程学院,江苏南京211100;2.河海大学文天学院,安徽马鞍山243031)
基于卫片的非序列无人机影像快速概略拼接方法
孙彦玮1,李浩1,孙丽1,李语旻2
(1.河海大学地球科学与工程学院,江苏南京211100;2.河海大学文天学院,安徽马鞍山243031)
针对非序列无人机影像,提出了一种基于卫星影像的无人机影像快速概略拼接方法。该算法首先利用改进的SURF算法提取特征点,然后利用最小欧氏距离寻找匹配点,最后结合模板匹配方法确定最终的正确匹配点。利用匹配点的尺度和方向信息计算无人机与卫星影像之间的相似变换参数,确定无人机影像的概略位置。试验结果表明,该算法拥有快速、准确和高适用性等优势,对卫星影像没有严格的时效限制,有一定的地形变化容错能力,能够满足快速概略拼接的要求,是一种可行的无人机影像概略拼接新方法。
非序列影像;无人机;卫片;概略拼接;SURF;模板匹配
无人机遥感是一种低成本、高灵活度的遥感手段,已经广泛应用于工程勘察、城市规划、灾害监测和土地利用调查[1]等方面,有效弥补了卫星影像分辨率低、重访周期长的缺点。但是多数无人机体积小、重量轻,无法携带精确的POS系统,影像间的方位信息无法准确获取。目前针对无人机影像拼接的方法主要有:基于姿态定位定姿系统(position and orientation system,POS)数据的拼接[2-3]和基于特征的拼接[4]。方法一耗时较短,但由于无人机姿态参数变化复杂、无规律,拼接精度较低;方法二的核心在于影像的特征提取,因此耗时有所增加,但拼接精度大幅提高[5]。
针对上述问题,本文提出一种基于卫片的无人机影像快速概略拼接方法,即以卫星影像作为底图,通过改进的SURF算法,并结合基于标准平方差的模板匹配方法,得到一种快速的、高适用性的无人机影像概略拼接方法。该方法不仅可以达到基于POS数据的拼接精度,处理无POS系统的无人机影像,而且速度快、耗时短,拥有更广泛的应用范围。
一、影像预处理
目前,卫星影像的分辨率最高能达到0.5 m左右,而无人机作为一种低空飞行器,其影像分辨率能达到0.1 m甚至更高[6]。卫星与无人机影像之间的分辨率差距,使得直接对无人机和卫星影像进行特征提取与匹配很难得到正确的匹配点。因此,首先应根据影像分辨率之间的比例对无人机影像进行降采样,使无人机与卫星影像拥有基本相同的分辨率,同时较低的分辨率也缩减了无人机影像的特征提取时间,加快了计算速度。其次,需要对无人机和卫星影像进行双边滤波。双边滤波器不仅考虑了像素点邻域的灰度相似关系,还考虑了像素点空间的邻近关系。通过对空间邻近关系和灰度相似关系的非线性组合,既达到了去噪的目的,又很好地保留了图像的边缘信息[7]。试验表明,双边滤波可以有效地去除弱特征点,减少特征匹配时间。记双边滤波的符号为HBL,双边滤波的数学表达如下

式中,Wx定义为

式中,x表示当前点位置;y∈s表示以x为中心的s× s区域内的点;Ix和 Iy表示对应位置的像素值;x-y 表示空间距离;Gσd表示空间近邻函数;Gσr表示灰度相似度函数。
二、特征点提取
SURF(speeded-up robust features)是 Bay等在SIFT算法基础上提出的一种快速鲁棒性特征提取算法[8]。其流程如图1所示。在特征点检测过程中,为了保持特征点的尺度不变性,需要构建多层尺度空间分别提取特征点,即使引入盒状滤波器仍然需要较大的计算量[9]。本文中,由于对无人机影像进行降采样,降低了无人机与卫星影像之间的尺度差异,因此,为了加快计算速度,仅从中选取4种尺寸的滤波器模板进行计算,如图2所示。

图1 算法流程

图2 滤波器大小示意图
滤波器模板的尺寸直接决定了提取出特征点的精细程度。若滤波器尺寸过小,提取出的特征点将过度表现图像中的细节特征,而由于各方面的因素,无人机与卫星影像一般存在较大差异,细节特征不尽相同;若尺寸过大,提取的特征点将会损失大量的地物细节信息,缺失了特征点的独特性与典型性。因此,为了既能准确反映地物的主要特征,又不过度表现细节特征,本文选取了39、51、75和99共4种尺寸的滤波器模板对特征点进行提取。
三、特征点匹配
在特征点匹配方面,SURF等主流算法均使用了欧氏距离匹配,即计算描述子之间的欧氏距离,当最近距离比次近距离小于阈值时,将最近距离点作为匹配点[10]。
但是,无人机与卫星影像之间存在较大的差异性。一方面,由于拍摄设备、拍摄方位、成像方式和大气条件等的不同,影像在覆盖范围、精细程度及颜色表现等方面均不同,同一地物在不同影像上的成像结果存在差异;另一方面,由于无人机和卫星影像在拍摄时间上的差距,不同影像中的地物可能存在变化。如果仅仅利用欧氏距离,匹配点中将含有大量错误匹配点,将对无人机影像的概略拼接产生巨大的不利影响。
模板匹配是一种传统的匹配方法,计算复杂度较高,但是改进的模板匹配方法在速度上有了很大的改观,而且由于其在计算过程中运用了特征点完整的邻域信息,在匹配准确性上拥有较大优势[11]。本文利用描述子的主方向对模板匹配进行改进,在匹配点中得到一对最佳匹配点,有效避免了影像差异产生的错误匹配点,确保了最终概略拼接结果的准确性。具体步骤如下:
1)计算无人机和卫星影像中特征点描述子之间的欧氏距离。若最近距离比次近距离小于阈值,则认为最近距离的两个特征点为一对匹配点,将两特征点及其最近距离与次近距离的比记录下来。
2)最近距离与次近距离的比越小,说明匹配点的独特性和相似性越高,按照距离比从小到大对匹配点对进行排序,如果匹配点过多,可以只选取前一部分匹配点参与下一步骤,减少模板匹配的时间。
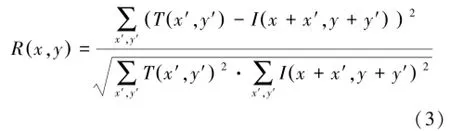
3)从匹配点序列中取一对匹配点,计算两匹配点主方向之间的旋角,对卫星影像进行旋转,消除两张影像之间的旋角。取特征点周围N×N像素的邻域,其中N取特征点尺度的5倍。采用标准平方差法进行模板匹配,并记录下平方差系数,系数越小,说明图像的相似度越高。标准平方差系数R的计算公式如下式中,T表示模板图像;I表示原始图像;x′、y′表示模板图像中的坐标;x、y表示模板图像的移动步长。
4)重复步骤3),从数对匹配点中选取标准平方差系数最小的前4对点,若4对点的主方向之差在一定的限差范围内,则认为4对匹配点是正确的,取系数最小的点作为最佳匹配点;否则由用户选择最佳匹配点。
四、无人机影像的概略拼接
对于严格的影像拼接与镶嵌来讲,平坦地区至少也需要4对正确的匹配点,而对于本文所采用的无人机与卫星影像,影像之间存在拍摄时间、拍摄视角及地物变化等差别,加之不同地形地区的地物特征数目也有所区别,所以不能保证对于任意影像都能提取出4对以上正确的匹配点。
考虑到概略拼接的要求,只需确定无人机影像在卫片上的大致位置,所以可以利用最佳匹配点的尺度和方向信息计算得到影像之间的相似变换矩阵

式中,s表示两个特征点尺度比值;θ表示两个特征点主方向之间的旋角;dx和dy分别表示两个特征点在x方向和y方向的相片坐标之间的差。
以无人机影像的左上角为坐标原点,计算出影像的4个顶点坐标,通过相似变换矩阵可以求得其在卫星影像中的坐标,得到无人机影像的概略位置。对区域内的所有无人机影像处理即可完成影像的概略拼接。
五、试验结果与分析
本文试验平台的开发环境为 Microsoft Visual Studio 2013,编程语言为C#。为了体现本文算法的适用性,选取了城市和山区两组影像对算法进行验证。试验所用卫星影像如图3所示,(a)为城市影像,影像中地物丰富,特征信息较多;(b)为山区影像,只有少量可供辨别的特征。图4和图5分别为城市和山区的无人机影像,影像分辨率为0.1 m。本试验的卫星影像均来自于Google Earth,影像拍摄时间未知,对比无人机和卫星影像可以明显看出影像在覆盖面积和色彩方面存在较大的差异,对于城市影像,由于城市建设等因素,存在一定的地物变化。

图3 卫星影像
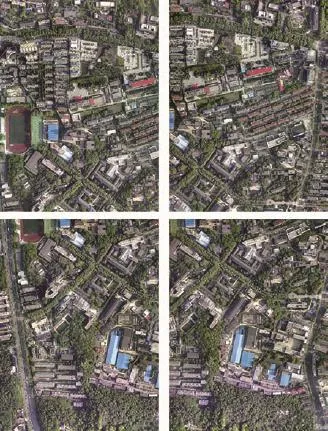
图4 城市无人机影像

图5 山区无人机影像
本文选取了3×3像素大小的滤波核对影像进行双边滤波,并且为了保证特征点的独特性,调整SURF算法的阈值,使特征点数目不宜过多,在模板匹配之前对特征点数目进行精简,仅选取最近次近距离比最小的10对匹配点参与模板匹配。两组影像的试验结果如图6所示,各影像像幅四角及像幅内明显地物的位置配准正确。试验结果表明,本文方法得到的无人机影像位置及影像之间的相对位置关系是准确的;另外,选取的两组影像地物特征数量差距明显,城市影像存在一些建筑物变化,表明本文算法具有较高的适用性,能够满足不同场景下的无人机影像概略拼接需求。
六、结 论
本文通过对SURF算法进行改进,结合模板匹配方法,提出了一种快速、高适用性的无人机影像概略拼接方法。通过采用对无人机影像进行降采样,简化SURF的特征点提取步骤,卫星影像仅需一次特征提取等方法,大幅度提高了影像的概略拼接速度。选取不同地区的影像进行算法试验,证明了本文算法的可行性,对于影像时效和地物变化没有严格的要求,定位准确度满足非序列无人机影像的拼接需求,能够达到后期影像处理的要求。本文算法具有快速自动处理等优势,相对于利用POS数据进行无人机影像概略拼接的方法,本文算法具有相当的计算速度和精确度,而且可以适用于无POS数据的无人机影像,拥有更广泛的适用范围。

图6 影像拼接结果
[1] 韩杰,王争.无人机遥感国土资源快速监察系统关键技术研究[J].测绘通报,2008(2):4-6.
[2] ZHANG Y,JIANG P,LI J,et al.The Research on the UAV Positioning Method Using the POS and Improved Image Matching[C]∥2015 International Industrial Informatics and Computer Engineering Conference.Xi’an: Atlantis Press,2015.
[3] 韩文超.基于POS系统的无人机遥感图像拼接技术研究与实现[D].南京:南京大学,2011.
[4] 丁南南.基于特征点的图像配准技术研究[D].长春:中国科学院研究生院,2012.
[5] 刘如飞,卢秀山,刘冰,等.一种改进的无人机航摄影像快速拼接方法[J].测绘通报,2014(2):46-49. [6] 胡晓曦,李永树,李何超,等.无人机低空数码航测与高分辨率卫星遥感测图精度试验分析[J].测绘工程,2010(4):68-70.
[7] 石雅笋.改进的SURF图像配准算法研究[D].成都:电子科技大学,2011.
[8] BAY H,ESS A,TUYTELAARS T,et al.Speeded-up Robust Features(SURF)[J].Computer Vision and Image Understanding,2008,110(3):346-359.
[9] TEKE M,TEMIZEL A.Multi-spectral Satellite Image Registration Using Scale-Restricted SURF[C]∥20th International Conference on Pattern Recognition.Istanbul:IEEE,2010.
[10] LOWE D.Distinctive Image Features from Scale-invariant Keypoints[J].International Journal of Computer Vision,2004,60(2):91-110.
[11] 刘锦峰.图像模板匹配快速算法研究[D].长沙:中南大学,2007.
A Fast and Sketchy Method for Non-sequential Image Mosaicking of UAV Using Satellite Image
SUN Yanwei,LI Hao,SUN Li,LI Yumin
10.13474/j.cnki.11-2246.2016.0228.
P237
B
0494-0911(2016)07-0077-04
2015-08-14;
2015-10-17
国家自然科学基金(41471276;51079053)
孙彦玮(1992—),男,硕士生,主要研究方向为摄影测量与遥感。E-mail:SunYW0108@hotmail.com
李 浩
引文格式:孙彦玮,李浩,孙丽,等.基于卫片的非序列无人机影像快速概略拼接方法[J].测绘通报,2016(7):77-80.