玉米植质钵苗运动轨迹及落地形态的研究
2016-08-07刘洪利张伟
刘洪利,张伟
(黑龙江八一农垦大学工程学院,大庆163319)
玉米植质钵苗运动轨迹及落地形态的研究
刘洪利,张伟
(黑龙江八一农垦大学工程学院,大庆163319)
针对玉米植质钵苗栽植过程中出现位移及翻转现象,对玉米植质钵苗栽植运动状态进行了分析。通过理论分析玉米植质钵苗翻转状态和玉米钵苗位移变化规律,建立钵苗落地角度和位移变化方程,得到了钵苗角度及位移变化的曲线图。利用高速摄影对钵苗实际运动情况进行分析,表明曲线与理论分析曲线拟合,验证了理论分析的正确性。当机车前进速度为0.43 m·s-1,栽植臂角速度为2 rad·s-1时,得到最佳投苗高度150 mm,钵苗水平位移S=48 mm,落地角度θ=19.3°。为覆土器的研究提供基础。
移栽机;玉米植质钵苗;落地形态;运动轨迹分析
玉米植质钵育苗移栽具有对气候的补偿和使作物生育提早的综合效应,是玉米增产的有效措施[1]。玉米钵育移栽机是玉米移栽的专用机械,采用偏心齿轮行星式栽植臂,工作时秧刀在供苗机构上夹持钵苗随栽植臂做圆弧运动,当栽植臂运动最低点时,秧刀抛苗,钵苗落入种沟内,覆土镇压完成栽植过程,但钵苗落入种沟内易发生覆土倒苗的现象,已有的研究如周德义设计凸轮摆杆式扶苗机构,使钵苗在支撑状态下覆土,保证钵苗直立[2]。彭旭等[3]研制栅条式扶苗器,根据“零速原理”扶苗栅条相对地面为零位移,保持钵苗落地时的直立状态,防止了钵苗的倒伏或埋没。曹国金提出了一种曲柄摇杆推苗机构,钵苗落地后采用推苗机构把钵苗推出开沟器,挤入开沟器的回土中[4]。以上的研究均是采用机械扶苗,需要另外增加机构,增加了整机的复杂性。
因此,在偏心齿轮行星式栽植臂基础上,使钵苗落入到沟底时的倾斜方向与覆土流的方向相反,利用覆土流运动产生的力将钵苗扶正,既保证了钵苗直立度又可适应高速化作业。基于这种理念,对投苗的过程中钵苗的运动情况进行了研究,建立了钵苗翻转及位移变化的运动方程,为覆土器及镇压器的设计提供了理论基础。
1 玉米植质钵育移栽机工作原理
如图1,玉米植质钵育移栽机由秧箱、传动机构、栽植臂、开沟器、覆土器组成。传动机构将动力传递给移栽机,通过变速箱调节供苗秧箱的供苗速度和栽植速度。事先将钵苗摆放在秧箱内,秧箱内的钵苗倾斜方向与机车前进方向相反,移栽臂2旋转到5的位置将钵苗夹持。利用“零速投苗”原理,使钵苗落地时绝对速度为零。保证栽植臂与机架角度相对固定时,控制投苗延迟角,使钵苗适当后倾,从而利用覆土作用的扶正钵苗,再由镇压轮镇压完成整个栽植的过程。

图1 玉米植质钵育移栽机示意图Fig.1 Diagram of corn planting bowl seedling transplanting machine
2 玉米钵苗位移变化分析
玉米植质钵育秧苗在栽植的过程中,与地面接触后产生倾斜,其倾斜方向与覆土流的方向相反,应保证钵苗在落地的瞬间即与覆土流接触,利用覆土流的作用力将其扶正,过早或过晚的接触都会出现倒苗、覆苗的现象,影响栽植质量。综上所述,玉米植质钵苗在栽植过程中位移变化量决定着覆土器的安装位置。下面以秧刀开始夹持钵苗的位置为基点,分析钵苗的位移变化规律。秧刀端点的运动为秧刀自转运动和机车运动的合运动,其运动轨迹如图2所示,1为秧刀随栽植臂自转的运动轨迹,2为合运动的运动轨迹。秧刀自转的运动轨迹为[6]:

φ0—偏心齿轮轴心连线与水平轴的夹角
φ3—轴心距连线转动的角度4
φ—行星轮绝对角位移
L—齿轮的直径
S—行星轮轴心到秧刀端点的距离
α0—行星轮心和秧刀端点连线与偏心齿轮轴心连线夹角
秧刀自转的速度为

则钵苗随秧刀自转运动的位移为

v0机车前进速度
钵苗脱离秧刀到落入种沟内的位移变化为:

下落时间t

即以秧刀开始夹持钵苗的位置为基点,钵苗移栽的位移变化量为

图2 秧刀运动轨迹Fig.2 Movement trajectory of seedling knife
3 玉米钵苗移栽角度变化分析
玉米植质钵育移栽机采用偏心齿轮行星式夹持秧刀,秧刀运动到夹持点,夹持钵苗,钵苗与水平呈一定夹角,当钵苗脱离秧刀后在夹持点产生切向速度,但由于秧刀对钵苗的夹持点与钵苗的质心不在同一点,下落过程中钵苗绕质心进行旋转,落地角度发生改变。落地角度影响覆土器的覆土夹角。所以应钵苗进行运动学及力学分析,建立钵苗角度变化方程,为覆土器的设计提供理论基础。
如图3所示通过实验方法得到钵苗的质心为B点,A点秧刀的夹持点。

图3 钵苗落地角度及位移示意图Fig.3 Diagram of seedling angle and displacement
根据栽植臂运动的轨迹方程得到抛苗时A点产生的切向速度v为
钵苗脱离秧刀下路的过程中只受到重力的作用故其竖直方向机械能守恒,即

mvl sinα=mv0h sin b
则钵苗落地角度方程为:

根据已有研究得到,栽植臂需在“零速投苗”状态下进行投苗,保持钵苗的直立度及稳定性。即得到机车前进速度为0.43 m·s-1,栽植臂角速度为2 rad·s-1时,栽植臂运动半径105 mm,即影响钵苗落地角度的因素为抛苗时钵苗离地高度h。根据单因素实验及机器的干涉性,钵苗抛苗的离地高度的变化范围为150≤h≤250(mm),即得到不同高度下钵苗的位移变化曲线及角度变化曲线。
由图4可知在不同高度条件下,随着高度的减小,钵苗与水平面的夹角不断增大。表明钵苗向后倾斜的幅度越来越小。由图5可知,随着高度增加水平位移变大,在高度150,其水平位移为4.8 cm,随着高度的增加水平位移不断变大,但高度越高落地时钵苗的冲力就越大,容易发生弹跳,所以选取高度150 mm时投苗,其运动轨迹如图6所示。

图4 高度与角度变化关系Fig.4 The variation between height and angle

图5 高度与水平位移变化关系Fig.5 The variation between height and horizontal displacement

图6 高度150 mm时钵苗运动轨迹图Fig.6 Diagram ofseedlingmovementlocusin theheightof150 mm
4 试验验证
4.1 试验仪器
为了对玉米植质钵苗的实际运动情况进行验证,制作了试验台并进行了验证。使用TCC-3土槽自动化试验车做牵引动力。栽植臂的栽植频率通过变频器(型号为ZVF9V-P0015T4SDR,变频范围:0~400 Hz)控制三异步电动机转速(转速为1 110转·min-1,额定功率1.1 KW)进行调节。采用美国Vision Research公司生产的V5.1型高速摄像机和深圳生产的枫雨杰TM牌500万像素摄像头,并利用MIDIAS、Excel和Photoshop对图像数据进行分析和处理。
4.2 试验材料
以正常的田间管理对玉米植质钵苗进行养护,玉米钵苗生长到三叶一心时的玉米植质钵盘作为试验材料,尺寸为42 mm×35 mm×32 mm,质量M=0.56 kg。
4.3 试验方法
试验采用V5.1高速摄像机,拍摄频率为125帧·s-1,即两帧图片相隔时间为0.008。机车前进速度0.43 m·s-1,栽植臂角速度为2 rad·s-1,钵苗投苗离地高度范围150≤h≤250(mm),在其中分别取10个点,对每个点的位移及角度变化进行分析。
4.4 结果分析
通过高速摄像得到的钵苗投苗实际运动图像如图4所示,以秧刀开始夹持钵苗的位置为基点,钵苗存在水平位移,在空中有翻转的现象,其翻转方向与机车前进方向相反。与地面接触后具有向后倾斜的运动趋势,与理论分析的钵苗运动情况基本一致。

图7 钵苗投苗过程Fig.7 Seedling sending process
利用MIDIAS软件分析不同高度下钵苗角度和水平位移的变化曲线图及在高度150 mm其运动轨迹,与理论分析所得到的数据进行对比分析,验证理论分析得到运动方程的正确性。高速摄像曲线与理论分析曲线拟合如下图所示。

图8 高度与角度变化关系Fig.8 The variation between height and angle
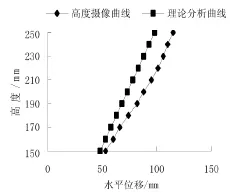
图9 高度与水平位移关系曲线Fig.9 The curve of height and horizontal displacement
通过拟合曲线图可知,高速摄像所得到的曲线图与理论分析得到的曲线图相识度90%以上,理论分析得到的运动方程基本符合实际运动情况。存在差异主要是由于机器的工作的不稳定性以及行驶中的震动。

图10 高度150 mm时钵苗运动轨迹图Fig.10 Seedling movement locus of 150 mm height
5 结论
通过理论分析建立钵苗运动轨迹方程和下落过程中角度变化方程,并通过高速摄像进行验证理论分析的正确性。得到以下结论:
(1)落地角度随投苗高度的增加而增大。水平位移随投苗高度的增加而增大。
(2)根据最小位移量确定最佳投苗高度150 mm,在此高度下钵苗落地角度为19.3°,水平位移48 mm。
(3)利用高速摄像及MIDIAS分析软件来研究玉米植质钵苗运动和动力学规律是一种可行的方法。
[1]郭建平,王春乙,马树庆.玉米育苗移栽防御低温冷害和春旱试验研究[J].自然灾害学报,2003,12(1):116-120.
[2]马树庆,袭祝香,王琪.中国东北地区玉米低温冷害风险评估研究[J].自然灾害学报,2003,12(3):137-141.
[3]周德义,孙裕晶.移栽机凸轮摆杆式扶苗机构设计与分析[J].农业工程学报,2011,27(11):35-41.
[4]曹国金.吊篮式棉花移栽机的研究[J].农机化研究,2006(4):164-166.
[5]陈建能,张翔.多杆式零速度钵苗移栽机植苗机构运动学模型与参数分析[J].农业工程学报,2011,27(11):35-41.
[6]赵丹华,李国琳.玉米烘干过程中表面温度场有限元分析[J].长春大学学报,2015(10):36-40.
[7]杨克军.栽培方式与群体结构对玉米生长发育及产量的影响[J].黑龙江八一农垦大学学报,2005,17(4):9-12.
[8]王一夫,王新利.黑龙江垦区农业现代化发展水平分析[J].黑龙江八一农垦大学学报,2014,26(1):99-104.
Study on Trajectory Path and Landing Form of Corn Planting Seedling
Liu Hongli,Zhang W ei
(College of Engineering,Heilongjiang Bayi Agricultural University,Daqing 163319)
According to the phenomenon of the displacement and turning appeared in the process of corn planting seedling,the motion trail of the corn plant seedling was analyzed.Through the theoretical analysis the state of corn planting pot seedlings and the rule of displacement of maize pot seedling,the equation of seedling landing angle and displacement was established,and the curve figure of angle and displacement of pot seedlings was obtained.High-speed photography was used to analyze the actual movement of seedling,the results showed that the curve corresponded with theoretical analysis curve,which proved the correctness of the theoretical analysis.When the forward speed of the locomotive was 0.43 m·s-1,planting arm angular velocity was 2 rad·s-1,the best height of seedling was 150 mm,the pot seedling horizontal displacement was 48 mm,the degrees of the landing angle was 19.3°.It would provide the basis for the study of casing.
transplanting machine;corn planting seedling;landing trajectory;motion trail analysis
S223.2+6
A
1002-2090(2016)03-0124-05
10.3969/j.issn.1002-2090.2016.03.024
2015-03-20
教育部高校博士点基金(玉米植质钵育移栽机械关键装置的理论研究与试验:20092305110002)。
刘洪利(1990-),男,黑龙江八一农垦大学工程学院2012级硕士研究生。
张伟,男,教授,博士研究生导师,E-mail:zhang66wei@163.com。
