水下作业机械手与工具自动对接技术研究
2016-08-04王东良
王东良
(交通运输部上海打捞局 上海 200090)
水下作业机械手与工具自动对接技术研究
王东良
(交通运输部上海打捞局 上海 200090)
水下作业系统是水下作业研究重点,对此,本文将对水下作业机械手与自动工具对接技术进行详细探究,并对油路系统和对接机构提出改进对策,以期更好的实现作业工具的自动换接操作。
机械手;工具;对接
1 引言
通过对水下作业系统进行深入研究,有利于进行水下作业机械手、作业工具以及工具库的遥控作业实验,从而更好的适应水下工程施工、水下打捞作业需要,因此,具有十分重要的意义。
2 水下作业机械手的结构
水下作业遥操作实验系统是由多个系统所组成的,包括水下作业系统、控制系统、网络操作系统以及摄像系统等等,其中,水下作业系统包括水下作业工具、水下作业机械手以及水下作业工具库,而控制系统又包括控制系统软件和硬件。
水下作业机械手总共有5个自由度,具体包括4个回转自由度和一个绕腕部轴线旋转的自由度,其中,4个回转自由度分别指的是手腕俯仰、肩部转动、小臂俯仰以及大臂摆动。手腕俯仰、大臂摆动以及小臂俯仰这三个自由度是通过电液位置伺服系统来实现控制的,而执行部件是单出杆液压缸,其是液压缸为不对称状态,对于执行部件的控制是通过电液伺服阀来实现的。通常情况下,水下作业系统的水下作业工具库可以同时携带四把水下作业工具。但是,在实际操作过程中,为了节约制造成本,一般只需要配备两件工具,分别是夹持器和切割器。并且工具的一端能够与机械手的对接腕实现有效连接。作业机械手的制作原材料一般是铝合金材料,质量比较轻,机械手的机构简图如图1所示。
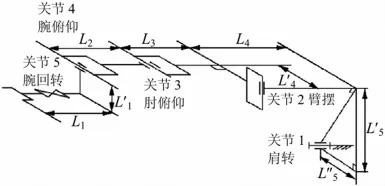
图1 水下作业机械手机构简图
3 水下作业工具库及水下作业工具
水下作业系统工具库是一种以圆盘旋转为运动形式的工具库,如图2所示。在实际应用过程中,在圆盘的转动作用下,可以将水下作业工具输送至对接位置,这样就能够将手腕与不同工具进行有效对接。综合考虑自动换接实验以及制造成本,还需要为水下作业系统研制夹持器和切割器这两种辅助工具。工具的一端能够与水下作业机械手的对接腕进行有效连接,由于液压回路末端有自封接头,因此,当与机械手对接腕脱开时,液压回路就能够与外界环境进行有效隔离。当工具与机械手手腕对接完成后,电磁阀可以对工具进行控制,并进行作业。与在水下使用的自动作业工具相比,夹持器和切割器缺少耐腐蚀防护,但是在使用性能方面没有较大区别。

图2 自动工具库的工作原理图
4 水下作业系统的对接位姿分析
4.1 水下作业系统的对接位姿分析
水下作业机械手连杆坐标系图如图3所示。水下作业机械手总共有五个自由度,具体包括肩翻转、腕回转、腕俯仰、大臂摆动、小臂俯仰这五个关节。摆角范围如下:①肩关节:0~90°;②腕回转:-1800~1800°;③手腕俯仰:-30~90°;④大臂摆动:-30~45°;⑤小臂俯仰:-300~900°;⑥最大回转半径:R=l.2m。在图3中,各连杆坐标系{1},{2},{3},{4},{5}可以应用下关节设置法,可以通过右手法则合理确定坐标轴的位置关系。为了更加准确清楚的对接时机械手以及工具的位姿关系进行分析,还应该要在机械手的端部位置建立坐标系{S}。坐标系{S}与坐标系{5}保持平行状态,坐标原点取在机械手的端面中心位置上。
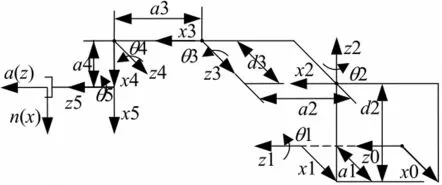
图3 水下作业机械手连杆坐标系图
4.2 工具库对接姿态与位置
工具库连杆坐标系如图4所示,其中连杆坐标系{1′}和{2′}采用主要下关节设置法,根据右手法则,可以对坐标轴的位置关系进行确定。表1指的是工具库连杆对应关节的转角范围以及连杆尺寸。值得注意的是,工具库的位姿需要综合考虑机械手的对接位进行确定,另外,工具相对于手端的对接位姿应为{T}={n,o,a,p}。
p=(0,0,X),0<X<200mm
即O(z)与O(′z)共线,工具坐标绕O(z)旋转θ5,θ5=0时机械手和工具库位姿关系如图5所示。为了有效实现对接,机械手和工具上油路接口必须严格对准。
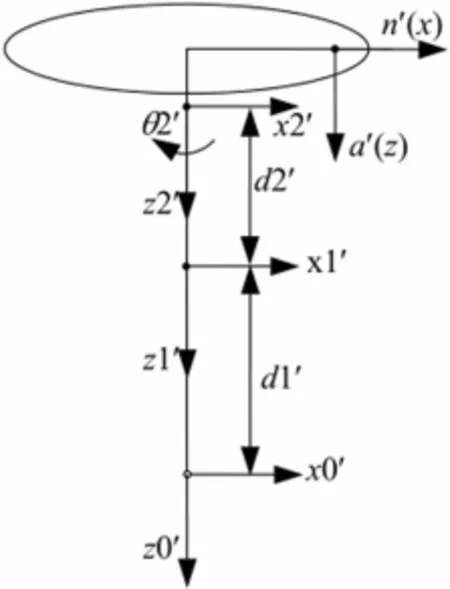
图4 工具库连杆坐标系图

表1 工具库坐标参数
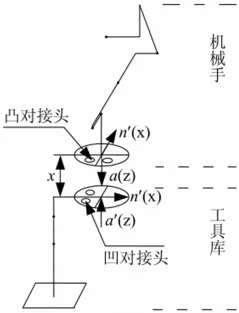
图5 机械手工具对接位姿示意图
4.3 锁紧与油路的接通
在实际操作过程中,为了确保机械手与工具能够锁紧,需要通过机械手手腕上的三个锁紧油缸和工具上的三个对应孔进行配合。
5 现有系统分析
油路自封接头与手腕与工具之间的油路是相互联通的,并且主要功能是对油路进行导通或关闭。另外,油路自封接头是由两部分所构成的,其中一部分为凸对接头,安装在手腕侧,另一部分为凹对接头,安装在工具一侧。一旦工具和手腕对接成功后,可以通过凹对接头导通油路,这样能够为工具提供压力油。如果手腕与工具相分离,则手腕和工具上的对接头就会自动封闭,有利于避免海水侵入。
5.1 油路分析
工具的驱动元件即为电磁阀控单出杆液压缸,控制元件是O型电磁换向阀。当在中间位置时,油口处于全封闭的状态,并且液压缸锁紧,液压泵不需要卸荷,值得注意的是,由于O型电磁换向阀的特殊性,在进行工具换接时,很可能出现质量问题。当完成机械手与第一把工具的对接后,电磁阀即可去掉控制信号,在这种情况下,阀芯处于中心位置,油口处于全封闭状态,与电磁阀A、B口相连的两条油路中,必然有一条油路充满高压油。
5.2 机械结构分析
在手腕和工具的对接过程中,在凹对接头和凸对接头的作用下,可以有效实现油路的联通,在外力的作用下,自封接头可以有效实现对接,当接头对接成功后,油路即可自行导通,其工作状态与供油方向没有较大关联,对于供油压力也没有过多要求。但是,对接头必须比对接基面略高,在对接过程中,两侧自封接头首先进行接触,而定位锥面并没有接触,因此,无法起到定心作用,为了有效确保两侧对接头能够顺利对接,要求手腕和工具具有较高的精度。
6 系统的改进
6.1 油路改进
通过上文分析可知,当O型电磁换向阀处于工具换接状态时,对接难度比较大,在这种情况下,如果改用Y型中位机能电磁阀,就能够有效解决对接难的问题。Y型电磁阀阀芯在中位时,进油口处于关闭状态,此时工作腔与回油腔保持联通,液压缸浮动,液压泵不需要有卸荷,在这种情况下,并联的其他执行元件的运动情况并不会受到干扰。在对接或者换接工具状态下,凹对接头和凸对接头到电磁阀A、B口的油路始终与回油口O保持相通状态,而且油压较小,对接难度较低。
6.2 机械结构改进
通过上文分析可知,为了确保顺利对接,手腕和工具必须具备较高的定位精度,因此对接难度比较大。为了简化对接方法,可以在现有的机构基础上设计导向机构,如图6所示,在手腕侧面,每隔120°安装一个导向键,需要注意的是,对应工具上的开键槽以及导向键必须确保在凹对接头和凸对接头进行对接时,已经将接头对正,因此,工具和手腕轴向及周向上必须提前定位好,周向定位需要导向键辅助,而轴向定位则需要导向键和导向锥面的工作作用,在图6中,必须确保L1=L3,L2=L6,L2> L1,L4>L3,L5>L3。
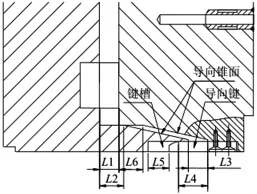
图6 导向结构示意图
7 结语
综上所述,本文主要对水下作业与工具自动化对接技术进行了详细探究,通过对对接关键技术进行分析,并且对系统进行改进,实验获得了成功。通过机械手,能够从工具库中取下工具,并且在使用过后能够自动放回。
[1]凌轩,陈文涛,郭嘉健,等.水下微小型机械手控制系统研究[J].装备制造技术,2014(06):121~123.
[2]刘卫东,张建军,高立娥,等.水下机械手主从遥操作双边控制策略[J].西北工业大学学报,2016(1):53~59.
[3]张奇峰,岳鹏.水下电动机械手夹钳结构[J].2014(03):36.
TP241
A
1004-7344(2016)15-0226-02
2016-4-16
王东良(1981-),男,工程师,硕士,主要从事海洋工程及打捞求助工作。
