沥青路面车辙深度检测系统探析
2016-08-04徐学凯王鹏翀
徐学凯 王鹏翀
(安徽省七星工程测试有限公司 安徽合肥 230000)
沥青路面车辙深度检测系统探析
徐学凯 王鹏翀
(安徽省七星工程测试有限公司 安徽合肥 230000)
众所周知,沥青公路具有10年的使用年限,现在我国早期的很多沥青公路已经发生了比较严重的破损情况,而在沥青公路中车辙属于主要的一种病害,其不仅会对路面产生极大的破坏作用,还会对行车安全产生危害。所以,如何能够准确、客观、快速地检测沥青公路的车辙病害具有十分重要的作用。基于此,本文并研究了沥青路面车辙深度检测系统,供大家参考。
沥青路面;车辙深度;检测系统
引言
在我国沥青公路建设不断发展的今天,在公路总里程中沥青公路具有越来越大的比重。与此同时,必须要快速地跟进沥青公路在建成之后的养护工作和管理工作。所谓的沥青路面车辙病害主要是指沿着行车轮迹在路面上形成的纵向带状凹槽,其通常具有1.5cm以上的深度。采用传统的公路路面检测技术进行公路检测往往具有较差的精度和较低的效率,在检测沥青路面车辙的时候存在着较大的问题,因为必须要不断地探索新的沥青路面车辙检测技术,确保沥青公路大发展的需求得到充分地满足。
1 沥青路面车辙深度检测系统的主要功能分析
该沥青路面车辙深度检测系统主要是用于在高速度和长距离的状态下连续行驶的检测车中,其具有采集、处理和存储道路面形图像的功能,而且在完成测量工作之后,能够通过采集到的结果科学地分析路面的情况。①该系统的操作平台为检测车,在行驶的时候通过激光传感技术对路面面形轮廓数据进行自动的采集,保持1~60km/h的行驶速率,具有不超过1m的采集间隔。②该系统的核心是车载工控机,其具有可靠、稳定的数据处理控制系统,可以对100km的路面进行连续检测。③其能够以相应的需要为根据处理、分析、计算检测结果,并且将多种路面评估参数保存下来。④在具有较高的精度和检测效率的基础上,该系统的检测设备在改进和维护的时候更加方面,有助于严格控制系统的检测费用和成本[1]。
2 沥青路面车辙深度检测系统的设计方案
由软件系统和硬件系统有机构成数据的采集与控制系统,其中的硬件系统主要包括数据采集器件、各种传感器、电缆电源以及相应的检测设备,其主要是利用下位机采集多路数据,并且实现A/D转换,上位机的主要功能是处理和分析数据,并且对检测结果进行输出。
该检测系统属于路面轮廓数据检测系统,其具有非接触式的特点,通过动态检测的方式对车道轮廓数据进行测量。在测量全车道的时候,由一块图像采集卡对每一组激光器进行控制,通过一台工控机处理数据,并且将基本的路面检测单元形成。由一个路面检测单元测量一个车道,所有的路面检测单元都能够实现独立的检测,最后可以汇总处理检测结果。该系统通过激光测距传感器采集路面的数据,借助其他传感器强化检测的精度,并且实施检测定位。由信号调理器对传感器输出的测量值进行转换处理,通过数据采集射频向计算机中传送,从而将路面评价参数形成,由电缆、电源、输入输出设备等对检测操作进行控制或辅助。图1为该系统的检测方案原理图。
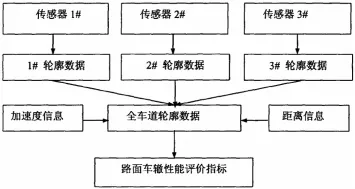
图1沥青路面车辙深度检测系统检测原理示意图
3 沥青路面车辙深度检测系统的主要硬件
该系统主要包括工控机、图像采集卡、CCD面阵摄像机等硬件,图2为系统的硬件组成示意图。

图2 系统的硬件组成示意图
3.1 激光传感器
作为一种通过光电传感技术非接触测量距离的新型传感器,激光传感器在沥青路面车辙深度检测系统中属于最为关键的传感器。激光传感器的设计原理为激光三角测量原理,其主要是由摄像器件和激光器共同组成的,具有较强的抗干扰能力、较高的定位精度、较快的测量速度等一系列的优势。现阶段路面检测系统硬件中的激光传感器在采集数据的时候普遍使用CCD摄像器件,其能够利用图像采集卡转化摄像机信号,使其成为数字信号,随后向计算机进行传输,使其进行识别、处理和显示图像的工作。三角测量原理是线式激光测距传感器的原理,采用优化设计的方式对其内部的角度和结构进行了改进,其主要组成部分为摄像头和线式激光器[2]。
3.2 图像采集卡
计算机不能够对传感器输出的信号进行直接识别,只有在对传感器输出的信号进行处理之后,计算机才能够对其实施分析和处理,信号调理的过程实际上就是处理转换信号的过程。信号调理方式主要包括线性化、滤波、隔离、放大、转换等,而数据采集硬件设备的可扩展性、可靠性、灵活性、采样速率、精度等决定了检测系统性能的优劣。目前插入式的数据采集卡是常用的数据采集设备,以下因素决定了数据采集卡的性能:①采样频率:数据采集卡必须要具备匹配传感器信号的频率。②采样方法:在实现A/D转换的时候,数据采集卡需要在很小的采集间隔内对各个通道的信号进行处理。③分辨率:数据采集卡数字化处理传感器信号的精度取决于其分辨率的高低[3]。④接口技术:以PCI总线为基础的数据采集卡能够使数据采集频率得以极大提升,作为一种独立于CPU的同步的局部总线,PCI总线具有33MHz的最高工作频率,133MB/s的数据传输频率。以PCI规范2.2向下兼容为根据设计图像卡的PCI接口,其支持即插即用标准,而寄存器则能够实现任何地址的映射,这样就能够防止出现硬件冲突。其驱动软件为全32位,能够实现一机多卡同时操作,并且进行逐帧并行处理。各卡均能够独立地设置亮度、对比度等各项参数,可以利用驱动软件进行调整,具备对视频信号等各项参数进行自动检测的能力[4]。
3.3 车载工控机
检测系统的处理平台就是工控机,其具备高速、实时存储、处理和分析大量检测数据的功能,同时对显示系统、硬盘、内存、CPU等均具有较高的要求。该工控机的参数为:Pentium4的CPU,3.2GHz;DDR40的RAM,512MB;ATIM10的显示适配器;Maxtor6Y160M0的硬盘,160G。
4 沥青路面车辙深度检测系统的具体测量应用
作为一项车载式系统,沥青路面车辙深度检测系统能够与测量车集成在一起,这样用户在操作的时候会显得更加方便。在车身的相应位置上安装系统的各种传感器部件,通过集中布线的方式使其信号线连接工业PC。沥青路面车辙深度检测系统的具体测量应用过程如下:将检测车发动,同时将路面检测程序启动实施测量工作。由传感器接收路面轮廓数据,而图像采集卡则对数据进行自动采集,并且在计算机中输入,这时候应用程序会马上对数据图像进行同步处理,并且保存处理的结果,将路面的指标同步地显示出来。同时对图像卡存储在计算机中的数据进行利用,在对图像进行采集和处理的间隙中从屏幕上显示出来。在这个过程中检测人员能够以具体的情况为根据随时随地地利用检测程序对测量进度予以暂停或者终止。
在测量的过程中检测人员利用显示在计算机屏幕上的路面信息观察路面状况的时候,如果需要对构造深度进行测量,这时候就可以对检测程序进行操作,将路面测量工作终止,然后通过对检测车的控制就能够测量路面车辙的构造深度,这时候检测程序就能够对电动平移台进行启动和控制,开展相应的测量工作。在完成测量构造深度的工作之后,检测人员可以对检测程序进行操作,使其继续进行路面测量。在完成测量工作之后,检测人员能够通过终止检测程序的方式结束整个工作,也能够对检测程序进行操作,使其进行数据分析。
5 结语
本文分析并介绍了沥青路面车辙深度检测系统的总体方案设计,其具有较好的可靠性、较高的精度、可连续检测、大范围、长距离等一系列的优势,能够有效地满足高质量、高速度、大规模、信息化、现代化的沥青公路路面养护管理要求。
[1]汪恩军,陈先桥,初秀民,张黎光.车辙检测中超声测距数据采集方法[J].武汉理工大学学报,2008(01).
[2]王鑫,唐振民.一种新的自动路面车辙检测方法[J].计算机工程与应用,2008(10).
[3]我国车辙检测技术达国际领先水平[J].公路与汽运,2008(03).
[4]陈伦琼,吴建文,徐友仁.图像处理在高速公路路面车辙检测系统中的应用[J].应用能源技术,2008(09).
TP274
A
1004-7344(2016)15-0154-02
2016-5-12
