基于K60电磁循迹智能车系统控制策略的设计
2016-08-01杨建姣朱凤武
杨建姣, 朱凤武,齐 迹
(吉林农业大学 工程技术学院, 吉林 长春 130118)
基于K60电磁循迹智能车系统控制策略的设计
杨建姣,朱凤武,齐迹
(吉林农业大学工程技术学院,吉林长春130118)
摘要:电磁组智能车作为“飞思卡尔”智能车大赛中形式较为多变的比赛组,控制策略的选择和设计直接影响整个车体的反应灵敏度和速度的调控。本文中的控制策略主要包括舵机转向和电机驱动两方面。测得每个电磁传感器检测到的电压信号范围和舵机转向的占空比范围,利用虚拟示波器显示,发现两者之间按比例成线性对应关系,从而实现舵机随赛道中线的随动,提高信号的检测速度和反应速度;系统采用模糊PID控制算法分段调制车速,既能快速提高直道速度又能立即降速顺利通过弯道。本设计选用“飞思卡尔”公司的32位K60单片机来满足系统对运算速度的要求。系统采用MATLAB建立仿真模型对控制策略进行分析改进。经调试,该系统的测试速度达到3.1 m/s。
关键词:电磁循迹;虚拟示波器;随动;模糊PID;MATLAB仿真
电磁循迹智能车作为汽车行业今后发展方向之一,受到越来越多的企业的关注和追捧,从而对电磁循迹小车的研究深度有待进一步提高。展望未来的新型汽车产业,电磁循迹相对于光电循迹和摄像头循迹而言,铺设轨道所需的成本较为低廉,此外,电磁组智能车节能环保、车体硬件设备简单易懂,为无人驾驶智能车提供良好的基础。德国大众研发的可以飞的汽车——磁悬浮汽车已经震惊世人,相信不久的将来电磁导航汽车也能得到广泛应用。
一、系统概述
本文选用K60单片机作为系统的控制中心。K60是“飞思卡尔”公司较为高端的32位处理芯片,其运行速度和计算速度都远超MC9S12XS128,提高小车整体的反应灵敏度。电磁传感器检测到的电压信号经过LC串联谐振、放大、半波检波、低通滤波输出直流电压信号,直接送到单片机的AD端口进行运算。AD返回值决定舵机的转角大小和电机转速。光电编码器检测电机实际转速与设定值形成闭环负反馈,加入模糊PID控制算法,实现电机对速度的快速响应。选用IAR作为编程环境,调用“野火”底层库函数,使得整个编程过程极大简化。上位机采用虚拟示波器显示各传感器返回值和舵机返回值,借助虚拟示波器软件,实现在线调试。本文主要针对电磁组智能车的舵机转向控制和电机驱动控制两方面设计控制策略,解决直道摆动和快速过弯的问题。
二、硬件设计
根据智能车需要实现的功能可以将系统分为:控制核心、电磁循迹单元、舵机转向单元、电机控速单元、编码器测速单元、起跑线检测单元和路障检测单元。系统框图如图1所示。系统硬件部分主要介绍电磁循迹单元。
常用的工字型电感型号主要有:6×8mm、8× 10mm、10×18mm等,电感的直径越大,通过其截面的磁同线数越多,输出端电压越大,为避免电感之间的耦合作用,本文选用3个8×10mm的电磁传感器依次排布,电感排布如图2所示。为实现舵机随漆包线随动,电感的排布间隔经过反复测试确定为左右各距中心点11cm,前瞻实物图如图3所示。
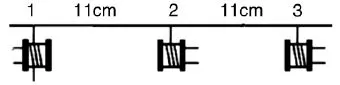
图2 电感分布示意图Fig.2 Schematicdiagramoftheinductancedistribution

图3 前瞻实物图Fig.3 Physical map of the look-ahead
三、控制策略的设计
本文主要针对起跑线检测停车、舵机转角控制和电机转速控制三个方面设计控制策略。起跑线检测选用创新思维,避免传统控制方法中的误判停车现象;舵机转向采用线型比例法控制舵机的随动,简化模糊控制和PID控制的编程复杂性;电机控制采用模糊PID算法,加快直道提速过程和入弯、出弯降速过程的反应速度,相对于经典PID而言,模糊PID更加智能化,运算更简便。通过以下三个控制策略实现小车的快速性和稳定性。
(一)起跑线检测
电磁组智能车选用干簧管来检测起跑线并控制停车程序。常规的控制规律是根据干簧管的工作原理实现的,即干簧管通过永磁铁时管内的引脚会被吸合随后又断开,二次通过时重复吸合并断开。干簧管的动作控制单片的某个I/O端口,起跑时干簧管导通,单片机接收到一次高电平;终点时单片机接收到第二个高电平,此时程序跳转到停车子程序,电机反转实现停车。
由于比赛时赛道会有坡道和障碍,车体会有大幅度震荡导致干簧管误导通;又或者赛道的静电强度很高,导致干簧管误导通,出现误停车的现象。这一现象在比赛过程中经常出现。为避免误停车问题,本文在此基础上增加判断条件。通过检测舵机大角度转向的次数,来判断车体在赛道上的进程,例如当舵机转过的最大角度的次数小于K(由赛道的复杂程度选定)时,小车不能顺利通过直角弯到和大S弯道,此期间的任何停车指令都作为伪指令屏蔽。此方法同样可以作为其他赛组的停车辅助条件,并已经在比赛中多次使用,效果可行。
(二)舵机随动控制
舵机转向的灵敏度直接影响车体的反应速度和控制效果,舵机的随动控制可以较好地满足灵敏度的要求。本文利用舵机占空比和传感器返回值二者成线性比例关系实现随动控制。
首先通过虚拟示波器测得1-3号传感器在直道上不同位置时的AD返回值,并对1、3号电感返回值做差进行线性化,在MATLAB里绘图得图4。图中横坐标表示偏移位置,单位cm,纵坐标表示输出直流电压,单位mV,线性化后的变化范围为-3960~3960。其次,通过虚拟示波器测得舵机左打死和右打死时PWM值,以S3010型号的舵机为例,PWM返回值的变化范围为730~950~1170。通过分析可得,两者之间存在线性关系,计算得舵机占空比PWM_DUO和电感返回值AD_L之间的关系式为PWM_DUO= AD_L/18+950。
相对于模糊运算和PID运算而言,线性化控制简单易懂,所需机械周期短,灵敏度控制效果明显。

图4 返回值曲线Fig.4 The return value curve
(三)电机模糊控制
“飞思卡尔”智能车车模选用RS-380SH型号的直流伺服电机,额定电压为7.2V。选用编码器或编码盘测量实际速度值,与电机设定值进行比较,形成闭环负反馈回路。与编码盘相比,四线制增量式的欧姆龙旋转编码器OME-100-1N具有精度高,稳定性好,使用寿命较长等优点。
智能车的速度控制需要考虑直道提速、入弯减速和出弯提速等问题,其控制效果直接影响车体的灵敏度。直道起跑时速度从零慢慢升到设定值;进入弯道要快速降速,避免冲出赛道;出弯时快速恢复到直道速度。对速度的控制转化为时间控制,因此要借助算法减小滞后。下面以单电机驱动为例,主要介绍电机转速的控制算法的选择和设计。
1.经典PID控制
常用的经典PID算法分为:增量式PID和位置式PID两种。由于小车运行过程位置信息难采集,速度及速度增量可以通过编码器返回值获得,因此增量式PID更为方便,其公式为:

由于经典PID算法在非线性系统和不能建立精确数学模型的时计算过程复杂,参数调节过于繁琐复杂,不能单独应用。
2.模糊控制
模糊逻辑控制是建立在模糊数学基础上的一种智能控制算法,主要应用在较为复杂、多变量的非线性系统。一个完整的模糊运算包括:定义变量、模糊化、知识库、逻辑判断和解模糊化五部分,其中控制规则是模糊控制器的核心。模糊控制具有较好的鲁棒性和适应性,但是对于小车系统,对速度进行简单的模糊处理会降低系统精度、稳定性和动态品质。若要提高精度就必然增加量化级数,导致规则搜索范围扩大,降低决策速度,甚至不能进行实时控制。综合以上两种控制算法的优缺点,系统选用模糊PID复合控制。
3.模糊PID复合控制
模糊PID对于较大滞后性和时变性系统具有良好的控制效果。其控制的一般形式为:

由于常规PID不具有在线自整定功能,为提高系统的控制效果,应用模糊理论建立参数KP、KI、KD与偏差绝对值|E|和偏差变化绝对值|EC|间的二元连续函数关系:

此控制器以偏差E及其变化量EC作为输入,针对不同的E与EC进行PID参数在线调整,使电机具有良好的动、静态性能[4]。
模糊PID控制系统为双输入三输出系统[5]。首先设定|E|、|EC|、KP、KI、KD模糊控制论域并设置其模糊语言分别为:大(B)、中(M)、小(S)和零Z。其次在MATLAB中设计隶属函数,如图5所示。最终得到模糊控制规则表,如图6所示。

图5 隶属函数Fig.5 The membership function
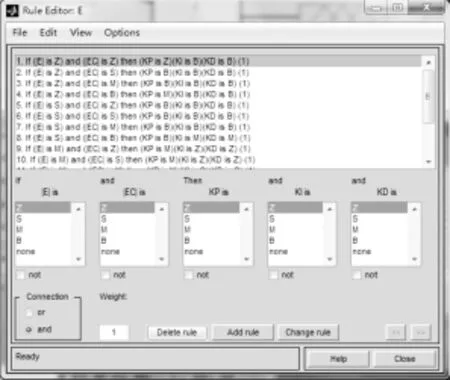
图6 模糊控制规则Fig.6 The fuzzy control rules
四、测试结果分析
利用以上控制策略对小车进行仿真模拟和实际测试。仿真过程中对电机模糊PID的控制参数进行在线分析和微调,并与经典PID的仿真曲线进行对比,证明复合控制的优异性。通过观察小车的实际行车路线和弯道处理分析舵机的随动控制策略的特点以及模糊PID的实际作用效果。
(一)模糊PID控制仿真结果分析
在MATLAB里建立仿真模型,针对电机转速这一被控对象进行PID控制和模糊PID控制,经整定,经典PID的参数分别为KP=4.5、KI=0.03、KD=2;模糊PID的参数分别为:KP1=4、KI1=0.01、KD1=3仿真曲线如图7(a)所示,经扰动的阶跃响应曲线如图7(b)所示。

图7 仿真曲线图Fig.7 The simulation curve
由图可以看出模糊PID缩短了反应时间,对系统稳定性、超调控制和抗干扰的能力比传统控制能力要强,控制效果更明显[6]。
(二)舵机转向分析
常用的舵机控制策略有二值化、随动和PID控制等,随动控制较阈值二值化控制而言能实现舵机连续性转动,又比PID或模糊控制简单易懂,缩短了程序执行所占用的时钟周期,提高舵机的反应灵敏度,与电机速度匹配。
五、结论
本文主要针对电磁组智能车的循迹和调速两部分设计控制策略。舵机采用随动控制,控制思想简单易懂,随动效果明显;电机调速采用模糊PID复合控制算法,反应时间减少,系统的稳定性能和抗干扰性能提高。应用MATLAB建立仿真模型,便于观察和调节,简化了调试过程。在常规比赛赛道上对智能小车进行测试,速度可达3.1m/s。
参考文献:
[1]王玲,张琨.智能汽车前景可期--访中国工程院院士李德毅[J].高科技与产业化,2013,(10).
[2]石晶,王宜怀,等.基于ARM Cortex-M4的MQX中断机制分析与中断程序框架设计[J].计算机科学.2013,(6).
[3]卓晴,黄开胜,等.学做智能车[M].北京:北京航空航天大学出版社,2007.
[4]耿瑞,基于MATLAB的自适应模糊PID控制系统计算机仿真[J].信息技术,2007,(1).
[5]刘金琨.先进PID控制及其MATLAB仿真[M].北京:电子工业出版社,2011.
[6]J.H Kim,and S.J.Oh.A fuzzy PID controller for nonlinear and uncertain.Soft Computing,2000,Vol.4(2).
(责任编辑:袁媛)
中图分类号:TP368
文献标识码:B
[文章编号]1671-802X(2016)02-0009-05
收稿日期:*2016-02-19
作者简介:杨建姣(1992-),女,河北唐山人,硕士研究生,研究方向:智能化检测与控制技术。E-mail:1577314678@qq.com.朱凤武(1968-),男,吉林公主岭人,教授,研究方向:智能化检测与控制技术。
A Design of Control Strategy of Electromagnetic Tracking Smart Car System Based on K60
YANG Jan-jiao,ZHU Feng-wu,QI Ji
(College of Engineering and Technology,Jilin Agricultural University,Changchun 130118,Jilin)
Abstract:Electromagnetic group smart car is changeable in the“Freescale”competition.The selection and design of the control strategy directly affects the sensitivity of the whole car reaction and speed regulation.The control strategy in this paper mainly includes such two aspects as steering and driving motor.The range of voltage signal and the duty ratio of steering of each electromagnetic sensor are detected.The linear relationship between them can be found by using virtual oscilloscope so that the servo of the steering following the middle track line can be achieved,which improves detection speed and reaction speed of signal.A fuzzy PID control algorithm is used for segmented speed modulation so that the straight-speed can be rapidly improved and the corner speed can be slowed down smoothly.The 32 Bit MCU K60 of Freescale Company is chosen to meet the requirements of the operation speed of the system.MATLAB simulation is used for analyzing and improving control strategy.After debugging,the test speed of the system reaches 3.1 m/s.
Key words:electromagnetic tracking;virtual oscilloscope;servo;fuzzy PID;MATLAB simulation
