基于嵌入式Linux的卡口车辆检测系统设计
2016-08-01徐弘扬
徐弘扬
(合肥工业大学 计算机与信息学院,安徽 合肥 230009)
基于嵌入式Linux的卡口车辆检测系统设计
徐弘扬
(合肥工业大学 计算机与信息学院,安徽 合肥 230009)
摘要:系统以三星处理器S3C6410为硬件平台,Linux操作系统为软件平台,利用OpenCV视觉算法库和交叉编译环境,在ARM平台上进行图像处理与车牌识别,并完成了SD卡模块、网络模块和图像采集模块的驱动开发。针对在ARM平台上处理数字图像数据量大、耗时长的情况,提出了多线程处理模式和中断线程化方法,极大地提高了系统的实时性。
关键词:嵌入式Linux;OpenCV;车牌识别;多线程;中断线程化
引用格式:徐弘扬. 基于嵌入式Linux的卡口车辆检测系统设计[J].微型机与应用,2016,35(12):87-89.
0引言
与基于X86平台的传统图像处理系统相比,嵌入式系统具有专用性强、处理速度快、软硬件可裁剪等优点[1]。本文基于ARM平台和OpenCV视觉算法库,采用多线程处理模式和中断线程化方法,实现对车牌图像的快速处理与识别。
1系统总体设计
本系统主要由S3C6410处理器、图像采集模块、红外对射模块、SD卡模块和网络通信模块组成。总体结构框图如图1所示。

图1 系统总体框架图
红外对射模块检测等待区是否有车辆,如有车辆停放,发送信号给处理器,并启动摄像头采集图像[2];SD卡模块用于存放车牌字符的模板库,处理器识别出车牌号并与SD卡中的字符模板进行匹配;网络通信模块将车辆图像信息直接上传给服务器。
2Linux平台搭建
2.1OpenCV移植
考虑到图像处理算法设计难度大、开发周期长、代码效率低等问题,本系统在Linux开发环境下,调用成熟高效的OpenCV函数库,利用交叉编译,生成在目标机上可运行的代码。
(1)安装OpenCV依赖库
OpenCV依赖于libpng、libjpeg、libstdcpp、libpthread等库,而这些库又依赖于其他一些库文件,所有需依赖的库都要编译安装。
(2)配置OpenCV
进入OpenCV根目录,运行./config,对OpenCV进行配置:--host=arm-linux指定交叉编译为ARM平台;--enable-static表示生成静态库。
2.2U-boot移植
Bootloader是系统上电/复位后,内核启动程序之前的一小段代码,其功能是初始化硬件设备,并将操作系统内核装载到RAM中运行。U-boot作为一个主流、通用的Bootloader,被成功移植到包括PowerPC、ARM、X86、MIPS等多种体系结构的处理器上。
2.2.1网卡驱动移植
系统采用DM9000网卡控制器进行网络通信,所以需要在板级配置文件My6410.h中屏蔽掉原有的cs8900配置,并添加对DM9000的支持。
要使挂接在BANK1上的DM9000正常工作,需要配置SROM控制器相关的寄存器。在板级初始化文件My6410.c中,添加DM9000初始化函数dm9000_init(),并修改寄存器SROM_BCn相应位值。
#define DM9000_Tacs0x2/*2clk
#define DM9000_Tcos0x1/*0clk
#define DM9000_Tacc0x1/*2clk
#define DM9000_Tcoh0x0/*0clk
#define DM9000_Tcah0x2/*2clk
#define DM9000_Tacp0x2/*2clk
#define DM9000_PMC0x0/*1data
2.2.2SD卡驱动移植
U-boot中并没有实现针对S3C6410 SD/MMC控制器的驱动程序,需要自行添加代码,实现SD卡的初始化、命令处理、块设备读等操作。
驱动文件sd_driver.c中,函数sd_init()实现SD卡初始化,它首先对SD/MMC主控制器时钟、中断等进行初始化,然后通过主控制器向SD卡发送命令,命令操作通过函数sd_cmd()实现。SD卡读操作函数sd_read用于从SD卡中将源地址从src开始,大小为size的数据读取到dst指定的地址中。sd_read函数原型为:
sd_read(src,dst,blkcnt *sd_block_size)
2.2.3USB驱动移植
本系统采用USB接口的图像采集模块,为使该模块正常工作,需要移植USB驱动。U-boot中已经实现了较完整的主机OHCI驱动,但没有USB设备驱动的代码,所以需要添加这部分代码。
在板级配置文件My6410.h中进行相应配置,使U-boot支持USB设备驱动、USB主机驱动及命令和USB存储设备,并在include/s3c6410.h中完善对S3C6410 USB OTG控制器寄存器的定义。
3车辆图像处理
对于摄像头采集的车辆图像处理主要分为3个步骤:车牌定位、字符分割和字符识别。其中,车牌定位是整个处理过程的基础,其定位的准确与否直接影响到车牌的字符分割和识别效果。图2给出车牌定位的一般流程。
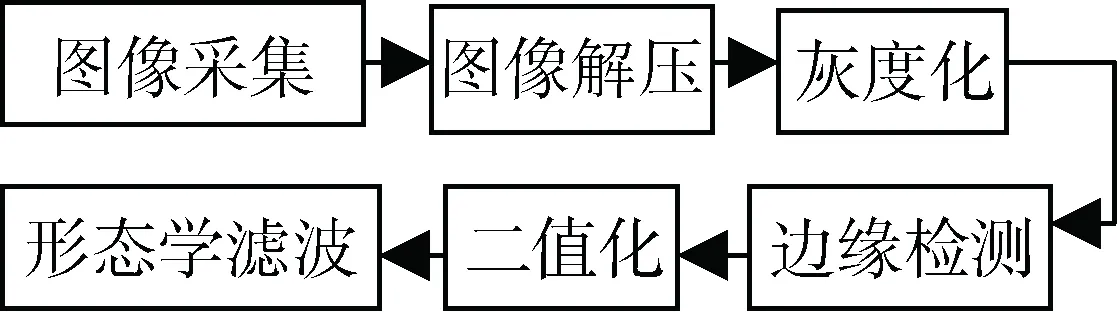
图2 车牌定位一般流程
从OpenCV函数库角度来说,调用cvCvtColor函数对彩色图像进行灰度化处理;利用Soble算子对图像进行垂直方向的边缘检测;再对图像进行阈值分割,取合适的阈值,将图像转换为二值图像;为了消除图像噪声,还要对其进行滤波操作,本系统采用的是形态学滤波方法,先使用闭运算操作再使用开运算操作,两种运算都包含腐蚀与膨胀;形态学运算后得到少部分矩形区域,即为车牌的候选区域,可以使用cvFindContours函数来实现轮廓检测,然后根据我国车牌长宽比的特征,即44:14,定位车牌区域。
车牌区域提取出来后,要将车牌字符分割,由于可能存在车牌倾斜的情况,导致字符分割与识别不准确,因此要先使用Hough算法[3]对车牌进行倾斜校正,然后将车牌字符在垂直方向上投影,字符之间的间隙会在投影上产生低谷,从而实现字符分割。分割完成后,对各个字符进行识别,采用基于模板匹配的ORC算法,将字符尺寸缩放至与SD卡中存储的模板大小一致并匹配,得出最佳的匹配结果。
4系统实时性改进
本系统采用三星S3C6410处理器,该CPU基于ARM1176JZF-S内核,由8级流水线组成,主频可达522 MHz,最高可达667 MHz,但由于在ARM平台上处理数字图像数据量大、过程复杂的特点,系统实时性还有待提高。
4.1多线程处理
线程是进程的一个实体,是CPU调度和分配的基本单元,它不拥有系统资源,但可与同一进程中的其他线程共享该进程的所有资源。本系统采用多线程处理方法,主程序中创建4个线程,分别用于图像采集、图像解压、灰度化和网络通信。图像采集线程从图像传感器中读取图像信息,图像解压线程利用libjpeg库将读取到的JPEG图像转换为BMP图像,灰度化线程对得到的BMP图像进行灰度化处理,网络通信线程用于将读取到的图像发送给服务器。为此,还要创建两个FIFO,用于线程间的资源共享,第一个FIFO用来存放图像采集线程读取到的图像信息,可被图像解压线程和网络通信线程共享;第二个FIFO用来存放解压后的图像数据,用于灰度化线程的处理。这4个线程并发执行,大大提高了CPU的利用率和处理速度,便于实时控制。
得到灰度化图像之后,还需对图像进行进一步处理,如果按照“边缘检测—二值化—形态学滤波”的步骤执行,则耗时太长,不利于提高系统实时性。这里开启3个线程,分别用于边缘检测、二值化和形态学滤波。由于这3个线程执行过程中有依赖关系,因此还要创建两个FIFO,分别用于存放边缘检测后的图像数据和二值化后的图像数据。改进后的车牌定位流程图如图3所示。
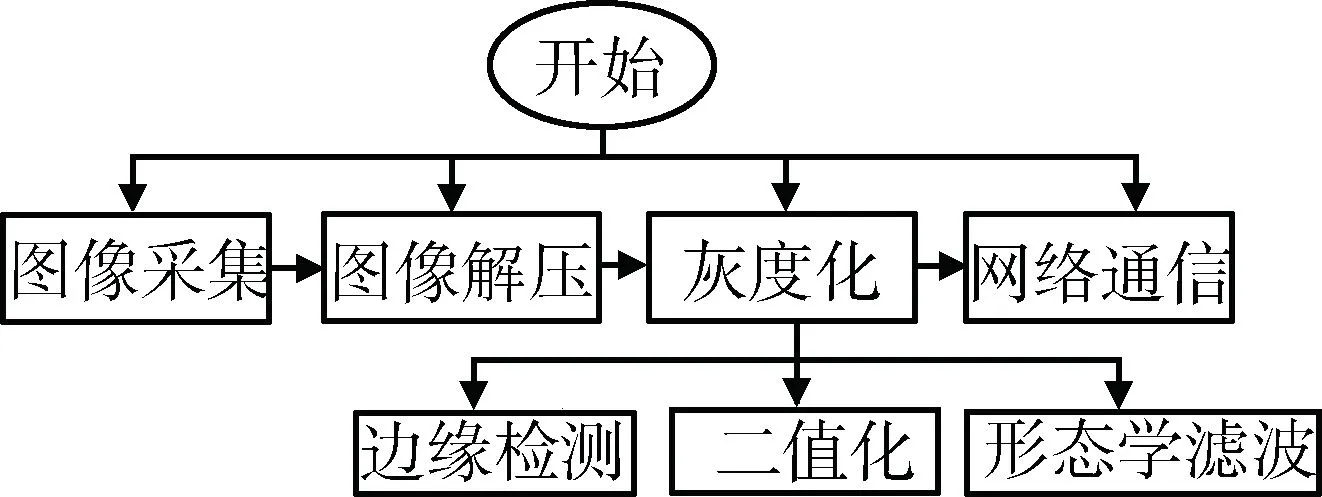
图3 改进的车牌定位流程图
4.2中断线程化
在Linux标准内核中,中断是最高优先级的执行单元,当中断触发时,内核必须立即响应中断并执行响应的中断处理程序,且不会被其他任何程序打断,这会导致实时任务得不到及时处理,如果系统IO负载严重,中断会非常频繁,实时任务很难有机会运行[4]。本系统采用中断线程化方式,为中断创建线程,中断作为内核线程被赋予相应的优先级,该优先级可以低于对实时性要求更高的任务,确保实时任务被优先快速执行,提高系统实时性[5]。
具体实现方法为:在内核初始化函数init()中调用init_hardirqs()函数,为相应中断创建一个内核线程,并分配优先级。本系统中主要有3种中断:SD卡传输中断、网络传输中断和OTG中断。
创建中断线程函数:desc->thread = kthread_create(do_irqd,desc,“IRQ %d”,irq),irq为相应中断的中断号。
当中断发生时,系统调用do_IRQ()函数,处理与架构相关的部分,然后调用_do_IRQ()函数判断中断描述符的状态字段是否包含SA_NODELAY标志,若包含则该中断已被线程化,唤醒相应的中断处理线程;反之则调用handle_IRQ_event()函数直接转入中断服务程序处理。
5结论
本系统基于Linux软件平台和ARM硬件平台,利用OpenCV视觉算法库,在嵌入式系统上实现车牌识别。该系统与基于X86平台的系统相比,实现了系统专用性、便携性等特点;与基于DSP平台的系统相比,大大降低了成本。针对ARM平台处理数字图像系统实时性不足问题,提出多线程处理和中断线程化方法,极大地提高了系统的实时性。实验结果表明,采用这种方法,从采集图像到完成识别所用时间大大减少,系统执行效率极大提高,完全能够满足实时处理数字图像的需求。
参考文献
[1] 田红鹏,焦鑫. 基于嵌入式Linux和OpenCV的车牌定位方法[J]. 计算机工程与设计,2014,35(11):3908-3911.
[2] 郭建,孙青,黄霞. 基于图像引导的自动导引小车系统设计[J]. 测控技术,2012,31(7):38-41.
[3] MUKHOPADHYAY P,CHAUDHURI B B. A survey of Hough transform[J].Pattern Recognition,2015,48(3):993-1010.
[4] 孙首昌,韩红芳,孟煜. 嵌入式Linux实时技术改进与实现[J]. 微计算机信息,2007,23(12-2):67-68.
[5] 单承刚. 嵌入式Linux下的实时性增强方案[J]. 电子技术应用,2010,36(7):137-139.
中图分类号:TP391.4
文献标识码:A
DOI:10.19358/j.issn.1674- 7720.2016.12.028
(收稿日期:2016-02-23)
作者简介:
徐弘扬(1992-),通信作者,男,硕士研究生,主要研究方向:嵌入式开发。E-mail:hongyang_xu@163.com。
Detecting system of intersection vehicles based on embedded Linux
Xu Hongyang
(School of Computer and Information, Hefei University of Technology, Hefei 230009, China)
Abstract:The system uses OpenCV and cross compiling to process image and identify license plate, and based on hardware platform of Samsung S3C6410 processor and software platform of Linux system, completes driver design of SD module and network module. In regard of massive data and timeout in processing digital image on ARM platform, the system proposes multiple threads and interrupt threading to enhance real-time.
Key words:embedded Linux; OpenCV; license plate identification; multiple threads; interrupt threading
