月球两极探测进展*1
2016-08-01王亚明封剑青邢树果丁春雨
王亚明,苏 彦,封剑青,戴 舜,邢树果,肖 媛,丁春雨
(1. 中国科学院国家天文台,北京 100012; 2. 中国科学院月球与深空探测重点实验室,北京 100012; 3. 中国科学院大学,北京 100049)
月球两极探测进展*1
王亚明1,2,3,苏彦1,2,封剑青1,2,戴舜1,2,邢树果1,2,3,肖媛1,2,3,丁春雨1,2,3
(1. 中国科学院国家天文台,北京100012; 2. 中国科学院月球与深空探测重点实验室,北京100012; 3. 中国科学院大学,北京100049)
摘要:从20世纪开始月球探测成为人类太空探测的重要内容,月球探测的手段越来越多样化,探测的分辨率越来越高,探测的区域也逐渐由全月转变为局部。月球的南北极区由于特殊的地理条件存在大面积的永久阴影区,因此一直以来备受国内外学者的重视。介绍了目前国内外对月球极区探测在光学影像、数字高程、水冰以及亮度温度等方面取得的重要科学成果,并且介绍了探测设备的参数,为我国正在开展的月球探测提供参考和建议。
关键词:月球极区探测;永久阴影区;水冰;光照情况;数字高程
月球是人类太空探测的首选目标,从20世纪50年代到70年代中期,探测活动主要集中在月球正面中低纬度地区。而从90年代开始,新一轮的探月活动加强了对月球南北极尤其是永久阴影区的探测。主要探测内容集中在地质地貌、水冰和光照条件。月球绕地球公转的轨道平面与地球绕太阳公转的轨道平面(黄道面)之间的倾角大约是5.145°,而月球的赤道平面和月球公转的轨道平面之间的夹角大约是6.69°,因此月球的赤道平面和地球的黄道面之间的倾角大约是1.54°[1]。在月球的南北极地区,太阳的入射角总是很低,光线几乎以平行月球的地平线的角度入射,较高的地区会受到阳光恒定的照射,而在极区的撞击坑中就有可能存在阳光照射不到的黑暗区域,也就是永久阴影区。图1是极区纬度在85°~90°地区的光照情况示意图,通过2 000 d观测时间计算得出的光照时间占总天数的百分比[2]。由于这种特殊的地形构造,撞击坑独特的地形、特殊的光照条件、水冰存在的可能和极区较低的温度等,是月球永久阴影区近几十年探测的重点。
1极区光学影像的探测
拍摄光学影像一直是最重要的探测方式之一,光学影像是对月球地形地貌、光照情况最直观的反映,对于极区的研究具有重要意义。
1994年1月,美国向月球发射Clementine极地椭圆轨道探测器。Clementine上携带的高分辨率摄影机拍摄月球南北极的高清图片,可以清晰地看到南北极区的地形地貌、永久阴影区的分布情况。由于常年没有太阳照射,光学照片显示永久阴影区内漆黑一片。
2003年欧洲空间局发射SMART-1,其上搭载的先进月球成像实验仪一共拍摄2万张高清照片,最高分辨率达40 m[3]。主要拍摄了月球南极地区Aitken盆地。该盆地位于月球背面,直径为2 500 km,是太阳系中已知的最大最古老的撞击坑。
2007年9月,日本发射月亮女神号,其上携带的地形相机(Terrain Camera, TC)在月球南极点附近的Shackleton坑获取观测数据。Shackleton坑是永久阴影区,由于温度极低,一般认为可能存在水冰的沉积物。文[4]根据TC相机获得的反照率分析认为Shackleton坑底部不存在暴露的纯水冰,水冰可能挥发掉了或者和月壤混合,也有可能根本就没有水冰。
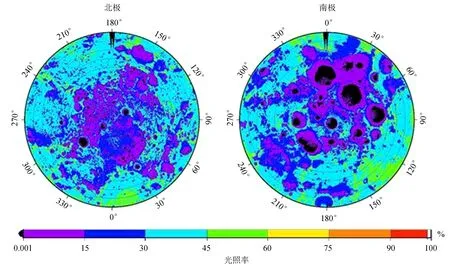
图1极区光照情况示意图[2]
Fig.1Illumination conditions of the poles of the Moon[2]
2007年10月,中国发射嫦娥一号(CE-1)探测器。其上携带三线阵CCD立体相机,当轨道高度为200 km时月表面空间分辨率120 m,月表成像宽度60 km[5],定位精度略优于2005联合控制网和Clementine基础地图(2.0版)。完成了目前覆盖最全、图像质量最好、定位精度最高的全月球影像图[6],而针对两极地区也有详细的拍摄(图2)。
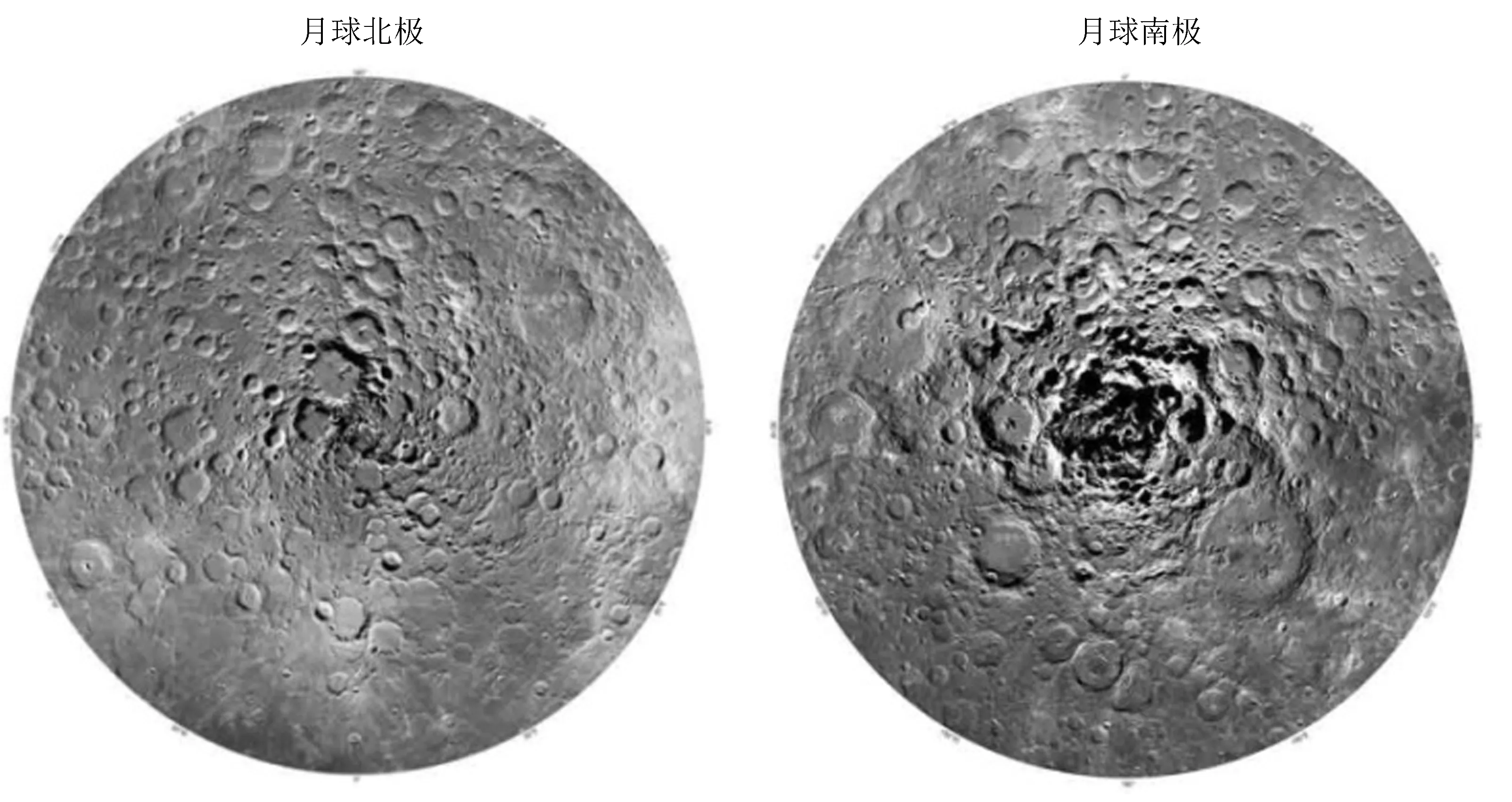
图2嫦娥一号拍摄的月球北极 (左) 和南极 (右) CCD影像[6]
Fig.2Images of the Moon′s poles taken by CE-1 CCD[6]
2009年6月,美国发射月球勘探轨道飞行器(Lunar Reconnaissance Orbiter, LRO)。其上搭载光学相机[7],主要任务是获取极区影像与光照环境,鉴别永久阴影区和部分光照区。月球勘探轨道飞行器的光学相机主要包括两台窄角相机和一台广角相机。窄角相机在轨道为5 km时,可获取分辨率0.5 m的全色图像,而广角相机在60 km高度时可以获得分辨率为100 m的七色彩色图像[7]。图3投影方式为极球面投影,影像覆盖区域为纬度60°~90°,影像图的效果比Clementine拍摄的效果更好。
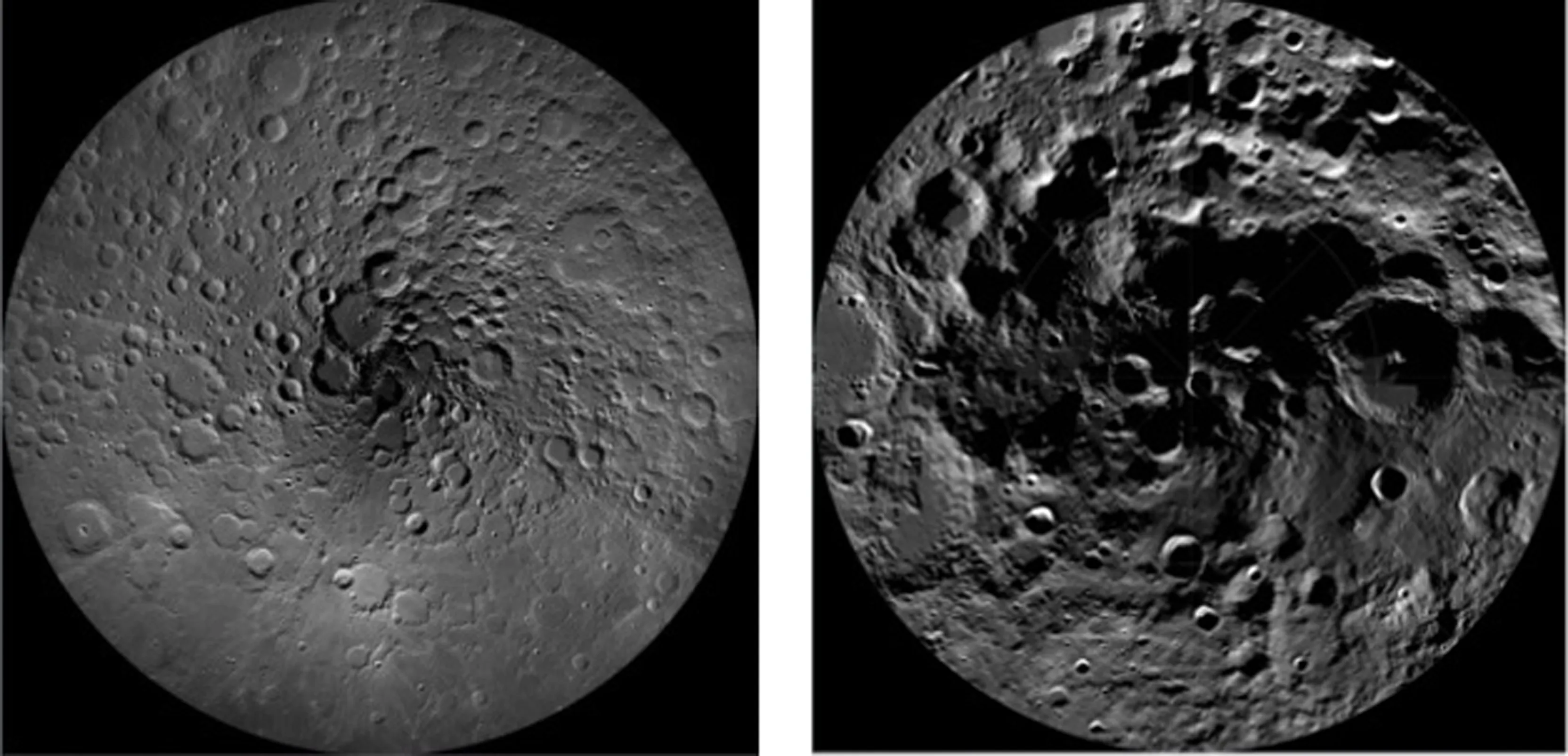
图3月球勘探轨道飞行器上的广角相机拍摄的月球北极 (左) 和南极 (右) 的影像[7]
Fig.3Images of the Moon′s poles taken by WAC of LRO[7]
2极区数字高程的探测
两极地区的地理情况很特殊,尤其是南极地区地形较为复杂,包含Cabeus、Shoemaker、Shackleton等主要的撞击坑。相比较周围地区,南极地区的地势也较高,南极的最高点高出月球平均半径3 km[8],南极点附近的Shackleton撞击坑边缘比周围高很多,因此相当长时间内受到阳光照射。北极地区地势相对较为平坦,存在的撞击坑相对较小,就地势而言北极地区处在一个从月海到高地的过渡地带[9]。
月亮女神号上的激光高度计在地形测绘上比先前美国地质勘探局发布的2005联合控制网给出的数据精细几百千米[10],其测量的分辨率达到5 m,测量范围50~150 km。
2008年10月印度发射Chandrayaan-1,其上搭载月球激光测距仪(Lunar Laser Ranging Instrument, LLRI),激光波长为1 064 nm,垂直分辨率为5 m。主要是对极区的精确高度测量,得到的数据可用于生成定量的月球引力模型。
月球勘探轨道飞行器上的激光高度计发射的激光脉冲可同时产生5个波束指向月面,并分别接收反射回波,探测的垂直分辨率高达10 cm,测量范围20~70 km,和单波束激光探测相比,激光高度计能获得更多的高程数据,从而计算出更精细的三维地形模型[11]。图4为激光高度计在极区获得的高程数据图,其中南北极各包含了9 200万和4 800万个海拔数据,图空间分辨率为240 m。
我国的嫦娥一号也搭载了激光高度计,其主要任务是获取月球表面三维立体影像。嫦娥一号激光高度计的作用距离是200 ± 25 km,约是月亮女神号上的激光高度计作用距离的两倍,垂直测量的分辨率为1 m[12]。
地形测绘是探月活动主要的科学目标之一,从Clementine开始,几乎所有的探测器做过激光高度计地形绘制。月球表面的石块、坡度、撞击坑都是月球车和月面巡视探测以及载人登月的主要障碍。因此需要精细的地形测绘,高分辨率的相机获取图像和激光高度计测量是获取月表三维地形模型的重要手段。对极区而言,地形的探测对光照条件的研究具有很重要的意义。
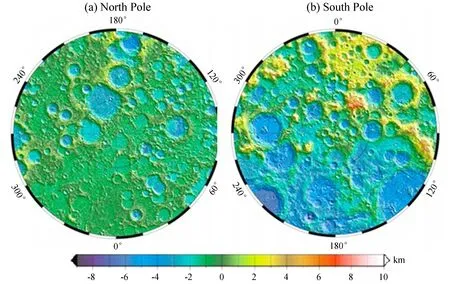
图4 激光高度计月球极区高程球面投影图. (a) 北极; (b) 南极 (纬度 > 75°)[11]
3极区水冰的探测
水冰的探测是月球南北极探测的热点。关于月球存在水冰的设想由美国Watson在1961年提出[1]。由于永久阴影区常年照射不到阳光,导致永久阴影区的表层和次表层温度常年维持在40 K(-233 ℃)左右。原始月球脱气作用产生的水和彗星撞击月表带来的水在低温下很难逃逸到太空中,就很有可能以冰的形式长期保存下来。
早在1992年,文[13]作者为了搜索两极永久阴影区的水冰,利用Arecibo天文台地基合成孔径雷达对月球的极地表面进行了制图,得到的结果没有发现面积大于1 km2区域存在高雷达后向散射截面和高圆极化率,也就是说月球极地至少不存在大面积水冰[13]。
美国的Clementine上搭载着双基雷达(Bistatic Radar, BSR)。相比较于Arecibo天文台的地基雷达,Clementine上双基雷达的频率和入射角度与Arecibo的地基雷达相似,但得到的数据覆盖面积更大。1994年4月Clementine双基雷达运行到第234轨,在月球南极地区的探测数据出现了雷达回波的异常峰值。这不是干燥月壤应具有的特征,而是呈现 “脏冰” 的特征[14],但也有科学家认为雷达回波异常也可能是表面粗糙导致的。
考虑到地月运动造成雷达图像模糊、分辨率降低,因此双基雷达在数据处理的算法上更为复杂,且双基雷达只有当月球目标地点、地基接收站和航天器轨道面处于同一平面(双基地角为0°)时才能进行观测[15]。而1998年1月,美国发射了月球勘探者号(Lunar Prospector)探测器。由于快速运动的中子碰撞到与其质量相当的氢原子会减速、衰减,月球勘探者号上的中子探测仪(Neutron Spectrometer, NS)就是通过统计超热中子、快中子以及中能中子的衰减数量从而对月球上氢的丰度进行测量,由此判断水冰的存在。中子探测仪在月球南北极探测到快速运动的中子的计数率出现明显减少,而这种减少是由于和氢原子撞击减速造成的,也就是说氢丰度提高。文[16]认为氢丰度的提高在很大程度上是因为水分子的存在。通过探测表明月球水冰是以0.1%~0.3%混合比的细小晶体形式存在,而且分布的面积非常大[17]。相对于雷达而言,中子探测仪的结果引发的质疑相对小很多,可以成为水冰存在的有力证据,但太阳风中也含有丰富的氢,月表的氢是按照水冰、羟基还是其他氢化合物的形式存在还有很多争论。
印度的Chandrayaan-1携带了一台微型合成孔径雷达(Miniature Synthetic Aperture Radar, Mini-SAR)对极区进行探测。由于Clementine的雷达探测结果存在较大争议,因此微型合成孔径雷达在设计时就采用与Clementine雷达不同的工作方式:发射左旋极化信号,接收水平极化和垂直极化的反射信号,这种工作方式可以保留反射信号的全部信息。在运行期间微型合成孔径雷达共获得600多轨雷达探测数据,拼接成纬度10°宽的两极图像。微型合成孔径雷达在月球的北极发现了40多个大小不等的撞击坑具有异常回波特征[18],其中大约30个完全是撞击坑内部的数据异常,并且绝大多数都和永久阴影区有关,不排除有水冰存在的可能。另外十几个撞击坑回波异常可能是表面粗糙引起的,而在南极也有类似的情况[19]。
同样在Chandrayaan-1上搭载的还有月球矿物制图仪(Moon Mineralogy Mapper, M3),它可以探测得到近红外(0.42~3.0 μm)光谱数据,文[20]通过这些数据得出在月球两极地区有羟基或水的光谱信号,这表示两极可能含有微量水和羟基。但是考虑到月球矿物制图仪只能感应月表几毫米的深度,即使月球矿物制图仪探测到水或者羟基的光谱信号,也仅仅存在于表层的月尘中,含量甚微,而且有可能是与月球的矿物以结晶的形式存在。由于结晶水和矿物的结合非常牢固,需要高温才能使水释放,这也是月球矿物制图仪在月球低纬度地区也能检测到水合物信号的原因。
美国的月球勘探轨道飞行器上也有一个和月球勘探者号上的中子探测仪类似的中子探测仪(Lunar Exploration Neutron Detector, LEND),两者都是通过统计中子计数来探测氢的含量。月球勘探轨道飞行器上的中子探测仪作为高灵敏度的探测仪,可以探测到1~2 m深度处的氢元素的分布。它获得了月球南极Cabeus陨石坑附近区域超热中子的分布数据,文[21]分析认为超热中子通量低的区域含有大量的氢元素,暗示水冰的存在。图5为月球勘探轨道飞行器上的中子探测仪探测的极区热中子分布图,黑色区域为月球勘探轨道飞行器上激光高度计探测的永久阴影区的边界。
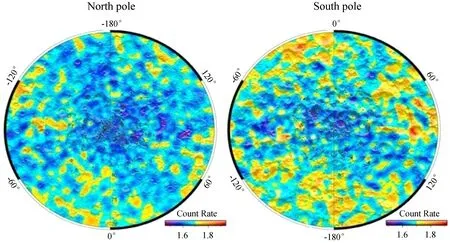
图5月球勘探轨道飞行器上的中子探测仪探测两极地区(纬度大于70°)热中子分布图[22]
Fig.5LEND map of epithermal neutrons at the lunar poles above 70 latitude[22]
除了中子探测仪,月球勘探轨道飞行器上还搭载了Mini-RF雷达(Miniature Radio Frequency radar, Mini-RF)。相较于微型合成孔径雷达,Mini-RF多了一个更高的频段X波段,可以获得精确度更高的数据。而且月球表面的空间分辨率更高,绕飞的轨道高度低,探测的区域也比微型合成孔径雷达要广。Mini-RF主要对极区进行雷达成像和水冰探测,在南极点Shackleton撞击坑获得的雷达图像显示,坑壁上圆极化率有所增高,且呈现零碎而不均匀的特征,随着深度增加而减弱。文[23]认为可能受坑壁月壤粗糙影响,但也不排除水冰存在的可能。如果坑壁月壤表面几米以内存在5%~10%的水冰,也会导致观测到的结果。图6为Mini-RF数据观测到的Shackleton撞击坑的圆极化率分布情况,以及利用半经验模型计算的不同含冰量的圆极化率分布图。
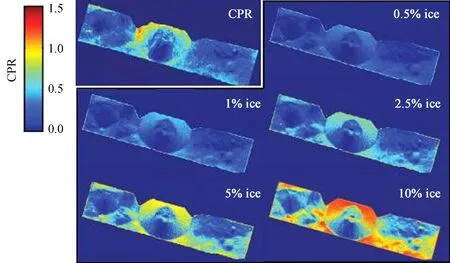
图6Mini-RF经过Shackleton陨石坑获得的圆极化率分布,左上角为观测值,其余为不同含冰量的半经验模型值[23]
Fig.6Mini-RF data from of Shackleton. Upper left panel is measured CPR data; other panels show synthetic CPR values calculated using a semi-empirical model of an ice-silicate mixture[23]
与月球勘探轨道飞行器一同发射的还有月球坑观测和传感卫星(Lunar Crater Observation and Sensing Satellite, LCROSS),它主要分作两部分 “半人马座” 和 “牧羊探测器”。2009年10月这两部分先后撞向月球南极Cabeus陨石坑,通过观测撞击产生的飞溅物来寻找水冰存在的证据。由于是分开的两次撞击,在 “半人马座” 撞击之后,月球坑观测和传感卫星剩下部分的可见光相机获得了拼接图像。撞击产生碎片溅射区域直径达到6~8 km,而近红外光谱仪探测到溅射物中含有羟基化合物的光谱特征,月球勘探轨道飞行器上的紫外光谱仪(Lyman-Alpha Mapping Project, LAMP)也探测到了羟基的发射谱线[24]。根据以上证据,2010年NASA宣布月球坑观测和传感卫星撞击成功地证明了月球Cabeus撞击坑中确实有水冰。
另外,Mini-RF和微型合成孔径雷达也都获得了月球坑观测和传感卫星撞击Cabeus陨石坑的雷达图像,显示此处的圆极化率和南部月球高地地区的平均圆极化率接近甚至要小,而且只有不到2%的区域圆极化率高于上述地区。这和月表以下几米处存在水冰沉积物而导致的高圆极化率假设不一致,但是这并没有排除不存在小的、分散的水冰混合物。在月球坑观测和传感卫星撞击之后,Mini-RF也获得了此处的雷达图像,但由于分辨率太低,不能分析出有效的结果。表1总结了对月球极区水冰进行探测的设备名称和参数。
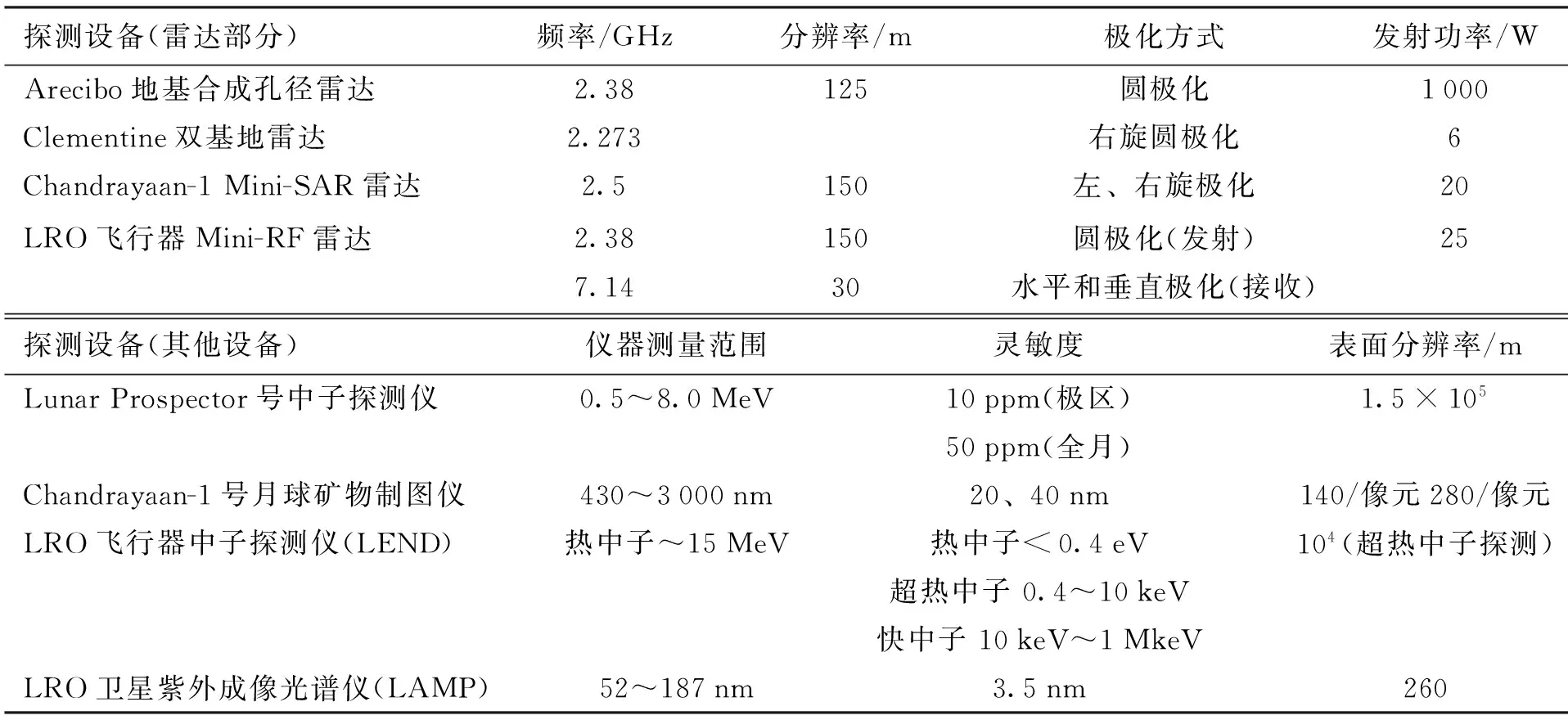
表1 月球极区水冰探测设备[21,23,25-27]
4极区辐射温度的探测
月球两极温度的研究对研究两极环境,尤其是水冰的研究有重要意义。有数据表明,两极地区受光照的地表温度为-50 ± 10 ℃(223 ± 10 K),永久阴影区内的温度可达到-233 ℃(40 K左右)。Clementine也搭载了用于测量辐射温度的长波红外相机,其测量的波长中心值为8.75 μm,遗憾的是它的探测范围主要集中在纬度小于60°的地区[28]。
月球勘探轨道飞行器搭载的月球辐射计(Diviner Lunar Radiometer Experiment, DLRE),主要测量月球表面热辐射和太阳反射率数据,辐射计一共有9个通道,测量波长从0.35到400 μm,其中4个测量热辐射的通道探测波长范围为12.5~400 μm,温度测量范围20~400 K,分辨率是5 K,空间分辨率0.2~1.3 km[29]。图7是月球辐射计测量得到的月球南极地区表层温度分布图,其中月球白天为月球地方时的11点24分到13点36分,夜间为月球地方时的21点24分到次日1点36分。
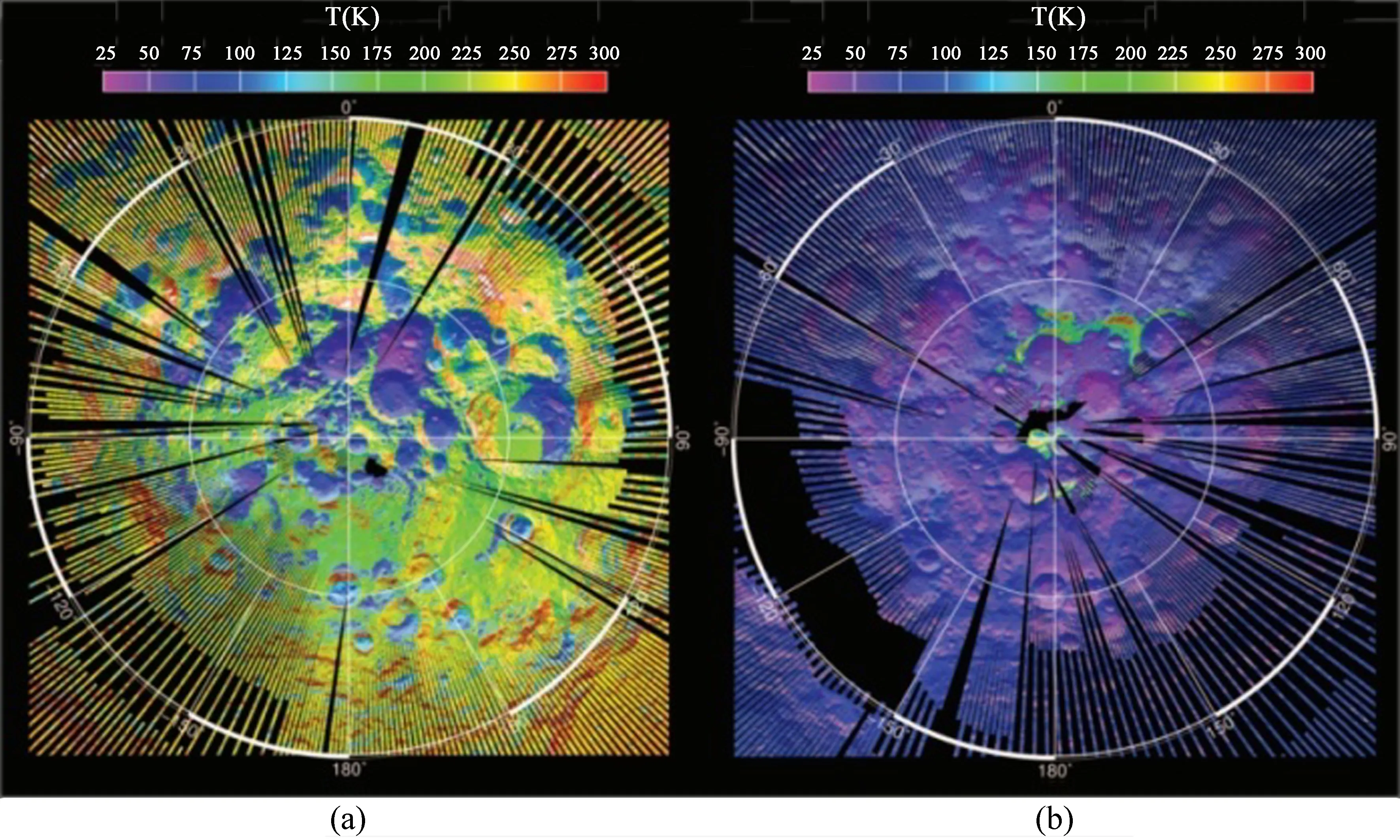
图7月球辐射计测量得到的月球南极地区表层温度分布图. (a)月球白天(b)月球夜间[29]
Fig.7Maps of measured surface temperatures in the lunar south polar region by DLRE. (a) Moon Day; (b) Moon Night[29]
嫦娥一号也对月球进行了微波亮温的探测。嫦娥一号首次搭载了多通道的微波辐射计(Chang′e Lunar Microwave Sounder, CELMS),一共包含4个通道:3.0、7.8、19.35、37 GHz,月表面的空间分辨率为30~50 km,测量精度为0.5 K。测量得到的整个月球表面微波热辐射,可以反演月壤厚度分布、氦-3含量以及月壤的温度、热流等物理特性。微波辐射计的探测数据覆盖了两极地区[30]。嫦娥二号与嫦娥一号设备相同只是轨道高度由原来的200 km变为100 km,在数据定标和处理上有些不同[31]。总体而言,由于多通道微波辐射计空间分辨率较月球辐射计差距较大,处理多通道微波辐射计数据得到的两极微波亮温分布图较模糊[32]。
5总结
从20世纪90年代到现在,国内外对于月球两极的探测从未停止。探测方式也多种多样:激光高度计与光学照片对地形、地貌进行勘测;红外和微波辐射计对极区辐射温度进行测量;而对于水冰的探测更显得一枝独秀,有通过不受光照限制的雷达探测,对雷达回波特性研究永久阴影区里可能含有的物质。还有对氢元素敏感的中子仪,当然氢含量的升高不一定证明水冰的存在,也可能是存在其他含氢元素化合物的原因。我国的探月活动虽然起步较晚,但是发展速度比较快。从国外的经验中可以总结出未来极区探测的启示:
(1)极区的光照情况、温度以及水冰的存在等问题依旧会成为未来极区探测工作的重点与难点。
(2)遥感探测的手段应该更加多样化,探测设备的精确度与分辨率应该更高,正因为目前无法在永久阴影区的月面直接检测水分子存在,未来的探测需要精度更高的不同遥感手段彼此进行相互验证。
(3)对于探测的区域范围可以由整个极区转向典型撞击坑内部。国外对于极区典型的撞击坑如Cabues、Shackleton都有过重点探测,甚至采用撞击后探测飞溅物的方式开展研究。
正是由于特殊的地理位置导致了特殊的环境,使得月球极区的探测显得更具挑战性,通过借鉴国外的研究内容,可以少走弯路,为未来深空探测打下一定的基础。
参考文献:
[1]Watson K, Murray B C, Brown H. The behavior of volatiles on the lunar surface[J]. Journal of Geophysical Research, 1961, 66(9): 3033-3045.
[2]Noda H, Araki H, Goossens S, et al. Illumination conditions at the lunar polar regions by KAGUYA (SELENE) laser altimeter[J]. Geophysical Research Letters, 2008, 35(24): 1-5.
[3]Foing B, Racca G, Marini A, et al. SMART-1 mission to the moon: technology and science goals[J]. Advances in Space Research, 2003, 31(11): 2323-2333.
[4]Haruyama J, Ohtake M, Matsunaga T, et al. Lack of exposed ice inside lunar south pole Shackleton crater[J]. Science, 2008, 322(5903): 938-939.
[5]赵葆常, 杨建峰, 汶德胜, 等. 嫦娥一号卫星CCD立体相机的设计与在轨运行[J]. 航天器工程, 2009, 18(1): 30-36.
Zhao Baochang, Yang Jianfeng, Wen Desheng, et al. Design and on-orbit measurement of Chang′E-1 satellite CCD stereo camera[J]. Spacecraft Engineering, 2009, 18(1): 30-36.
[6]李春来, 刘建军, 任鑫, 等. 嫦娥一号图像数据处理与全月球影像制图[J]. 中国科学: 地球科学, 2010, 40(3): 294-306.
Li Chunlai, Liu Jianjun, Ren Xin, et al. The global image of the moon by the Chang′E-1: data processing and lunar cartography[J]. Science China: Terrae, 2010, 40(3): 294-306.
[7]Robinson M, Brylow S, Tschimmel M, et al. Lunar Reconnaissance Orbiter Camera (LROC) instrument overview[J]. Space Science Reviews, 2010, 150(1): 81-124.
[8]Wählisch M, Hoffmann R, Wagner R, et al. High resolution mosaic and digital terrain model of the Lunar South Pole region derived from Clementine data [C]// 30th Annual Lunar and Planetary Science Conference, March 15-29, 1999, Houston. 1999.
[9]程安云, 王世杰, 李雄耀, 等. 月球南北两极研究进展与发展趋势[J]. 地球物理学进展, 2007, 22(4): 1070-1074.
Cheng Anyun, Wang Shijie, Li Xiongyao, et al. Researches on lunar poles: advances and trends[J]. Progress in Geophysics, 2007, 22(4): 1070-1074.
[10]Araki H, Tazawa S, Noda H, et al. Lunar global shape and polar topography derived from Kaguya-LALT laser altimetry[J]. Science, 2009, 323(5916): 897-900.
[11]Smith D E, Zuber M T, Neumann G A, et al. Initial observations from the Lunar Orbiter Laser Altimeter (LOLA) [J]. Geophysical Research Letters, 2010, 37(18): 109-118.
[12]王建宇, 舒嵘, 陈卫标, 等. 嫦娥一号卫星载激光高度计[J]. 中国科学: 物理学 力学 天文学, 2010, 40(8): 1063-1070.
[13]Stacy N, Campbell D, Ford P. Arecibo radar mapping of the lunar poles: a search for ice deposits[J]. Science, 1997, 276(5318): 1527-1530.
[14]Nozette S, Lichtenberg C, SPUDIS P, et al. The Clementine bistatic radar experiment[J]. Science, 1996, 274(5292): 1495-1498.
[15]丁春雨, 封剑青, 郑磊, 等. 雷达探测技术在探月中的应用[J]. 天文研究与技术, 2015, 12(2): 228-242.
Ding Chunyu, Feng Jianqing, Zheng Lei, et al. A review of application of radar-detection techniques in lunar exploration[J]. Astronomical Research & Technology, 2015, 12(2): 228-242.
[16]Feldman W C, Maurice S, Lawrence D J, et al. Evidence for water ice near the lunar poles[J]. Journal of Geophysical Research: Planets (1991-2012), 2001, 106(E10): 23231-23251.
[17]郑永春, 王世杰, 刘春茹, 等. 月球水冰探测进展[J]. 地学前缘, 2004, 11(2): 573-578.
Zheng Yongchun, Wang Shijie, Liu Chunru, et al. Review on exploration of water ice on the Moon[J]. Earth Science Frontiers, 2004, 11(2): 573-578.
[18]Spudis P D, Bussey D B J, Butler B, et al. The Mini-SAR imaging radar on the Chandrayaan-1 mission to the Moon[C]// 40th Lunar and Planetary Science Conference, held March 23-27, 2009 in the Woodlands. 2009.
[19]Spudis P D, Bussey D B J, Baloga S M, et al. Initial results for the north pole of the Moon from Mini-SAR, Chandrayaan-1 mission[J]. Geophysical Research Letters, 2010, 37(6): L06204-1-L06204-6.
[20]Spudis P D, Bussey D B J, Baloga S M, et al. Character and spatial distribution of OH/H2O on the surface of the Moon seen by M3on Chandrayaan-1[J]. Science, 2009, 326(5952): 568-572.
[21]Mitrofanov I G, Sanin A B, Boynton W V, et al. Hydrogen mapping of the lunar south pole using the LRO neutron detector experiment LEND[J]. Science, 2010, 330(6003): 483-486.
[22]Mitrofanov I, Litvak M, Sanin A, et al. Testing polar spots of water-rich permafrost on the Moon: LEND observations onboard LRO[J]. Journal of Geophysical Research: Planets (1991-2012), 2012, 117(E12): E00H27-1-E00H27-14.
[23]Thomson B, Bussey D, Neish C, et al. An upper limit for ice in Shackleton crater as revealed by LRO Mini-RF orbital radar[J]. Geophysical Research Letters, 2012, 39(14): L14201-1-L14201-4.
[24]Gladstone G R, Hurley D M, Retherford K D, et al. LRO-LAMP observations of the LCROSS impact plume[J]. Science, 2010, 330(6003): 472-476.
[25]Spudis P D, Bussey D B J, Lichtenberg C, et al. Mini-SAR: an imaging radar for the Chandrayaan-1 mission to the Moon [C]// 36th Annual Lunar and Planetary Science Conference, March 14-18, 2005, in League City. 2005.
[26]Kumar P A, Kumar S. Estimation of optical maturity parameter for lunar soil characterization using Moon Mineralogy Mapper (M3) [J]. Advances in Space Research, 2014, 53(12): 1694-1719.
[27]Nozette S, Spudis P D, Bussey B, et al. The Lunar Reconnaissance Orbiter miniature radio frequency (Mini-RF) technology demonstration[J]. Space Science Reviews, 2010, 150(1): 285-302.
[28]Lawson S L, Jakosky B M, Park H S, et al. Brightness temperatures of the lunar surface: Calibration and global analysis of the Clementine long-wave infrared camera data[J]. Journal of Geophysical Research: Planets (1991-2012), 2000, 105(E2): 4273-4290.
[29]Paige D A, Siegler M A, Zhang J A, et al. Diviner lunar radiometer observations of cold traps in the Moon′s south polar region[J]. Science, 2010, 330(6003): 479-482.
[30]Xing Shuguo, Su Yan, Feng Jianqing, et al. The deconvolution of lunar brightness temperature based on the maximum entropy method using Chang′e-2 microwave data[J]. Research in Astronomy and Astrophysics, 2015, 15(2): 293-304.
[31]封剑青, 苏彦, 刘建军, 等. 嫦娥二号卫星微波探测仪数据定标和处理结果[J]. 地球科学: 中国地质大学学报, 2013, 38(4): 898-906.
Feng Jianqing, Su Yan, Liu Jianjun, et al. Data processing and result analysis of CE-2 MRM[J]. Earth Science: Journal of China University of Geosciences, 2013, 38(4): 898-906.
[32]邢树果, 苏彦, 周建锋, 等. 基于最大熵方法月球表面亮温度数据处理模拟[J]. 天文研究与技术——国家天文台台刊, 2013, 10(3): 255-263.
Xing Shuguo, Su Yan, Zhou Jianfeng, et al. Simulations of processing of data of brightness temperature map of the lunar surface with the maximum entropymethod[J]. Astronomical Research & Technology——Publications of National Astronomical Observatories of China, 2013, 10(3): 255-263.
*基金项目:国家自然科学基金 (41403054) 资助.
收稿日期:2015-08-25;
修订日期:2015-09-09
作者简介:王亚明,男,硕士. 研究方向:月球遥感数据处理. Email: wangym@nao.cas.cn
中图分类号:P35
文献标识码:A
文章编号:1672-7673(2016)03-0300-10
A Review of Lunar Polar Exploration
Wang Yaming1,2,3, Su Yan1,3, Feng Jianqing1,2, Dai Shun1,2, Xing Shuguo1,2,3, Xiao Yuan1,2,3, Ding Chunyu1,2,3
(1. National Astronomical Observatories, Chinese Academy of Sciences, Beijing 100012, China; 2.Key Laboratory of Lunar and Deep Space Exploration, National Astronomical Observatories, Chinese Academy of Sciences ,Beijing 100012, China; 3. University of Chinese Academy of Sciences, Beijing 100049, China)
Abstract:Since the 20th century, lunar exploration has become an important part of human space exploration. Now, the means of lunar exploration are more varied; the spatial resolution is higher; and the explored regions are gradually changed from global areas to partial areas. Due to the special geographical environment, there is a large area of permanently shadowed regions in the lunar pole, which makes lunar polar regions become the highlight of scientific research. In this paper, we review some scientific achievements of various researches on lunar polar regions, which are mainly related to optical images, digital elevation model (DEM), presence of water-ice and brightness temperature. This paper also introduces the parameters of detection equipment. All these can provide some references and advice for future lunar exploration.
Key words:Lunar polar exploration; Permanently shadowed regions; Water ice; Illumination condition; DEM
CN 53-1189/PISSN 1672-7673
