简易风洞装置的设计
2016-07-26
(成都树德中学高三九班,四川 成都 610031)
一、引言
风洞实验室,是指以人工的方式产生并且控制气流,用来模拟飞行器或实体周围气体的流动情况,并可量度气流对实体的作用效果以及观察物理现象的一种管道状实验设备[1]。该实验是飞行器研制工作中的一个不可缺少的组成部分,一款新的飞行器成功推出必须通过风洞实验。由于风洞的控制性佳,可重复性高,所以风洞实验不仅应用于航空航天工程,而且在交通运输、房屋建筑、风能利用等领域也广泛地应用。
2015年,在学校的职业生涯规划课中,我有幸参观了西南交通大学的XNJD-3风洞并体验了风洞的神奇效果,为此,我一直念念不忘自己设计一个简易的风洞装置。终于在暑假期间,在老师的指导下,网上购买器材和元件,搭建并编程制作了一个简易风洞装置。
二、系统设计与实现
1.方案设计
风洞装置由圆管、连接部与直流风机构成,如图2.1所示。风洞竖直放置,内径大约4.5cm且内壁透明平滑,小球可以在其中上下运动;管体外壁标有A、B、C、D标志线,BC段有1cm间隔的短标志线;风机在风洞的底部,上面有防止小球落入的格栅。测试人员通过键盘输入小球的位置信息,调节风机的转速,实现小球在风洞中的位置控制。
按照控制要求,系统主要由主控模块、测距模块、显示模块、键盘输入模块、电机驱动模块、电源模块组成。系统控制框图如图2.2
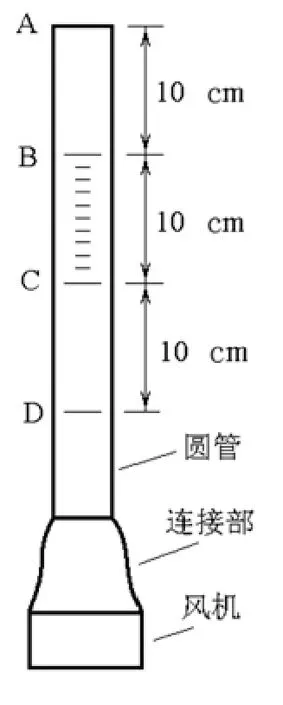
图2.1 风洞结构图
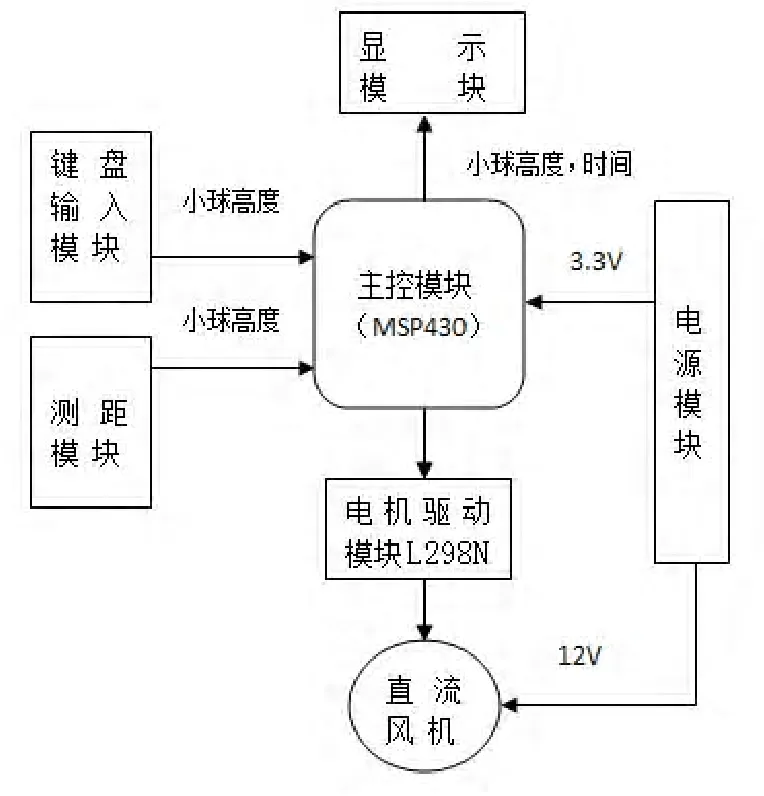
图2.2 系统控制框
2.电路设计
系统主控模块采用TI公司的MSP430F149,此款单片机功耗低、有看门狗(WDT)、模拟比较器、16位定时器、液晶驱动器、10/12位ADC、PWM等丰富的内外设,性价比高[2]。电源模块通过降压、整流滤波、稳压处理(如 7812、7805等)形成。
测距模块选择红外对管阵列。通过并排的红外接收管阵列对物体反射光的接受与否,搜索和跟踪小球,确定其空间位置从而达到测距的目的。此系统中我们装载4组红外对管放置于A、B、C、D四个点。图2.3为一组红外对管电路图。
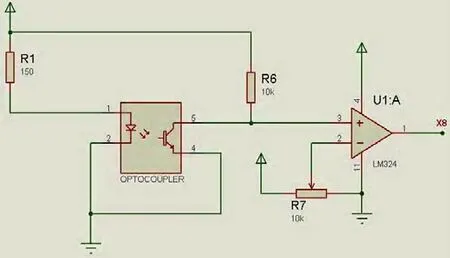
图2.3 一组红外对管电路图
由图可以看出:红外对管是由一个红外线发射管和一个光敏二极管组成的。当小球挡住光线时,光敏管不导通,只有很小的饱和反向漏电流(暗电流)。当小球离开有光照时,饱和反向漏电流马上增加,形成光电流,在一定的范围内它随着射光强度的增强而增大,这样就可以判断出小球的位置。
显示模块用选用12864显示屏做显示。显示面积大,数字和汉字显示容易实现。
风机选用电吹风电机。风力大,且其圆形架子,直径与风洞的圆管的直径相近,有利于安装和保证气密性。电机驱动模块选用包含4通道逻辑驱动电路的电机专用驱动芯片L298N。电机驱动芯片L298N是SGS公司的产品,内部包含4通道逻辑驱动电路,其电路如图2.4所示。OUT1、OUT2和 OUT3、OUT4之间可以分别接 2个电动机,5、7、10、12 脚接输入控制电平,控制电机的正反转,ENA,ENB接控制使能端,利用单片机产生PWM信号接到ENA,ENB端子,对电机的转速进行调节。

图2.4 直流电机驱动电路图
3.软件设计
3.1 程序功能描述
按控制要求,软件主要涉及到键盘设定位置、实际位置与风机转速控制的匹配和液晶显示部分的编程。
(1)小球初始状态:单片机接收到键盘设置的小球位置信号后,控制风机输出相应转速,防止小球波动过大
(2)小球稳定状态:小球5s内到达指定位置并稳定3秒以上,上下波动不超过±1cm。同时,小球也可以在有效范围上下浮动。此环节中,单片机根据光电传感器测出的高度信号,输出占空比可调的PWM信号调整风机转速,从而调整小球在圆管中的位置。
(3)液晶显示部分:液晶显示小球高度位置及维持时间
3.2 程序流程图
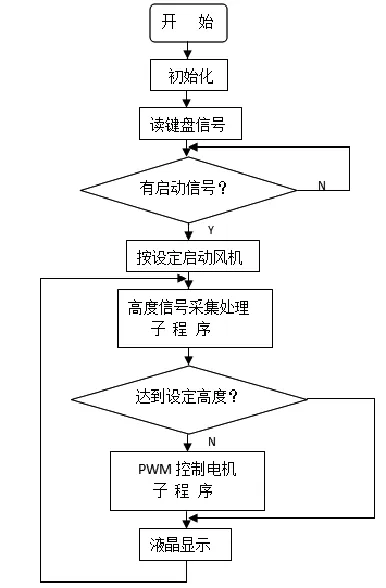
图2.5 主程序流程图

图2.6 PWM控制电机子程序流程图
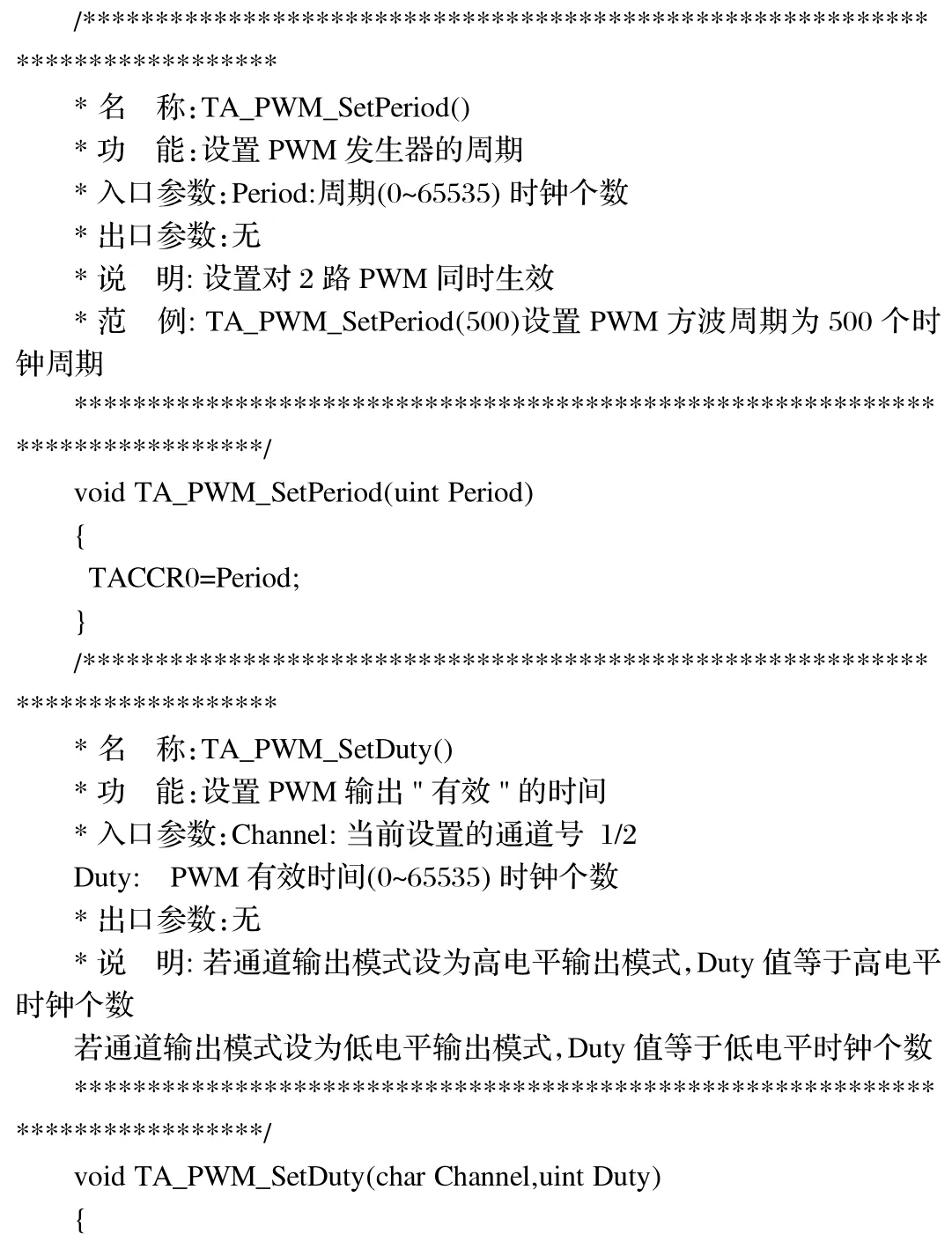
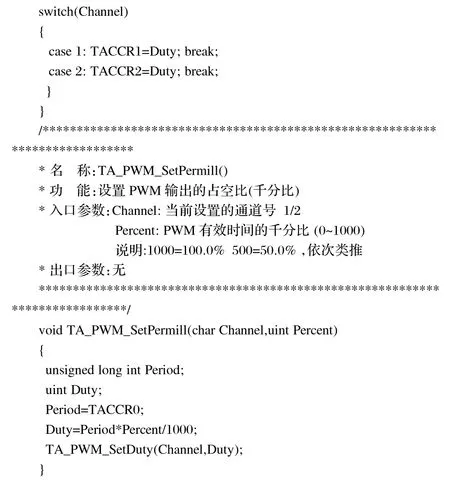
3.3 PWM调速部分程序段
PWM调速信号的产生和控制是系统稳定的关键,其占空比和周期需要根据实际装置进行反复调试,本文给出调试的部分程序如下:
三、系统测试
1.测试条件与仪器
1.1 测试条件:在实验室环境下:白天、晴、白炽灯照射、无风,系统硬件电路无误,程序写入单片机。
1.2 测试仪器:高精度数字毫伏表、模拟示波器、数字示波器、数字万用表、直尺、游标卡尺。
2.测试结果及分析
2.1 测试结果

表1 PWM信号占空比与小球位置关系
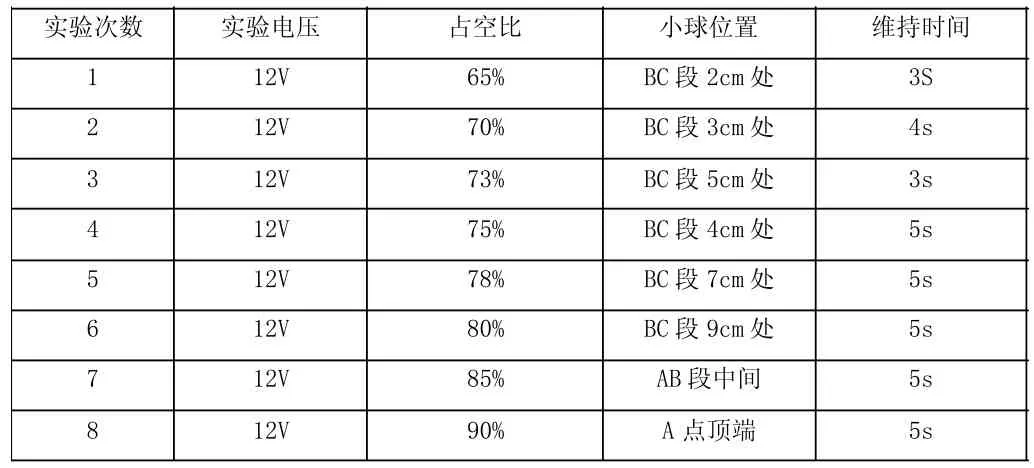
表2 PWM信号占空比与小球实际位置
2.2 测试结果分析
上述测试数据表明:随着占空比的增加,风机的风速逐渐加大,小球在圆筒中的位置由低端升到高端,在AB段、BC段、CD段可以维持3—5s,由此可以得出以下结论:风洞中被测物体的状态可以通过单片机控制并检测。
