基于FPGA的运动控制系统设计与实现
2016-07-26倪明仪
倪明仪
(南宁铁路局货运处,广西 南宁530000)
基于FPGA的运动控制系统设计与实现
倪明仪
(南宁铁路局货运处,广西 南宁530000)
摘要:为提高系统性能和降低成本,基于FPGA设计和实现了一种运动控制系统,包括:Nios II软核、PWM脉冲发生器、测量单元等功能模块。轨迹发生器基于卷积的加减速控制方法实现,提高了运动平滑性。实验结果验证所设计的运动控制系统的可行性和有效性。
关键词:FPGA;PWM;运动控制
运动控制系统是航空航天、高铁系统、工业自动化的重要部件,其实现形式包括:基于DSP、基于DSP+CPLD、基于DSP+FPGA,以及基于ARM的运动控制系统等[1,2]。轨迹规划中的加减速控制方法有梯形加减速、指数加减速、S曲线加减速[3]。这些基于多项式的加减速控制方法,计算复杂度高,系统效率低。然而,基于卷积的加减速控制方法,可减小计算复杂度,更适合高阶的加减速控制方法[4]。
因此,本文研究了一种基于FPGA运动控制系统,实现了基于卷积的加减速控制方法。实验验证所设计的运动控制系统是有效和可行的,能够实现四阶的加减速,可跟随位移命令。
1 基于FPGA的运动控制系统
图1是FPGA内部总体功能模块,包括:时钟模块、数据通信接口、Nios II软核、PWM脉冲发生器、测量单元。
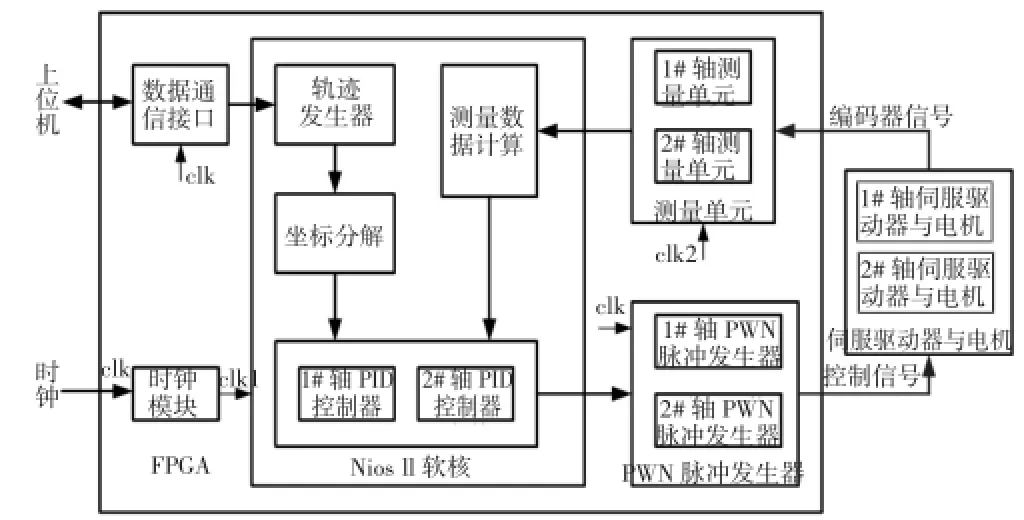
图1 FPGA内部总体功能结构图
Nios II软核,完成核心运算功能,主要包括:轨迹发生器、坐标分解、测量数据计算和PID控制器。轨迹发生器基于卷积的加减速控制,实现轨迹规划。坐标分解,将轨迹规划得到的位移,进行逆解,分解到每个轴上。每个轴的控制量,结合反馈量,进行PID控制。PID控制器输出控制量,给PWM脉冲发生器。
PWM脉冲发生器,接收PID控制器输出的数据量,生成占空比为50%、频率可变的PWM信号,以及方向信号。
测量单元,输入正交的A相与B相信号,通过判断A相与B相的领先与落后关系,确定方向。通过四倍频,检测A相与B相信号的边沿产生四倍频信号,提高测量的精度。得到计数值后,送到Nios II中的测量数据计算模块,计算速度和位移。
2 轨迹规划方法与实现
Nios II中的轨迹发生器,实现加减速控制,得到平滑的加速度、速度和位移曲线。利用基于卷积的加减速控制方法,计算量小、输入参数少、易于实现更高阶的加减速控制。
2.1卷积方法
卷积运算是一个迭代运算,每次只需两次加法和1次除法运算。
卷积函数为

其中,m是卷积函数的时间参数。
卷积运算为

2.2基于卷积的加减速控制方法
基于卷积实现四阶加减速控制的原理,可通过执行连续的三次卷积运算得到。
时间参数n1、n2、n3、n4的计算为:
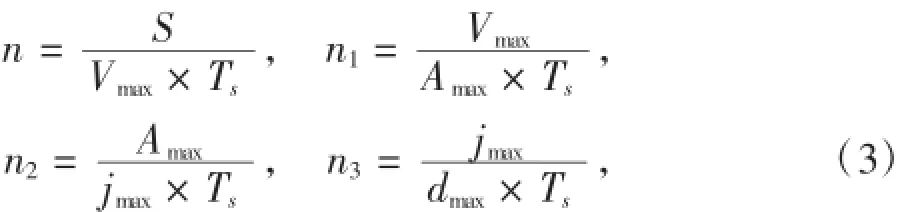
其中,Ts是采样时间,S是位移,Vmax、Amax、jmax、dmax分别是最大速度、加速度、加加速度、加加加速度。
四阶加减速规划,经三次卷积计算后的速度为
2.3轨迹发生器实现
轨迹发生器从上位机得到运动参数Ts、S、Vmax、Amax、jmax、dmax,然后执行下列步骤:
步骤1:得到输入函数X0(kTs)=Vmax;
步骤2:计算n、n1、n2、n3;
步骤3:计算卷积函数H1(kTs),H2(kTs),H3(kTs);
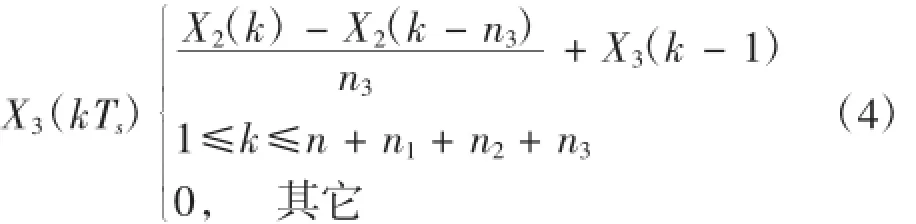
步骤4:通过卷积运算得到四阶的速度曲线X3(kTs);
步骤5:将速度曲线累加和和差分得到位移曲线、加速度、加加速度、加加加速度曲线。
3 实验验证
为验证基于FPGA实现的运动控制系统的可行性与有效性。进行了单轴控制实验。实验给定参数:S=0.04 mm,Vmax=0.02 mm/s,Amax=0.02 mm/s2,jmax=0.04 mm/s3,dmax=0.01 mm/s4.图2是运动过程中的位移跟随和跟随误差。实验结果显示,可以跟随给定的位移命令,能够精确到达终点位移0.04 mm,且跟随误差小于0.75 mm.
实验结果,验证了基于FPGA的运动控制系统的有效性和可行性;基于卷积的加减速控制方法,可方便的实现更高阶的轨迹规划,使得运动更加平滑,而且跟随误差小。
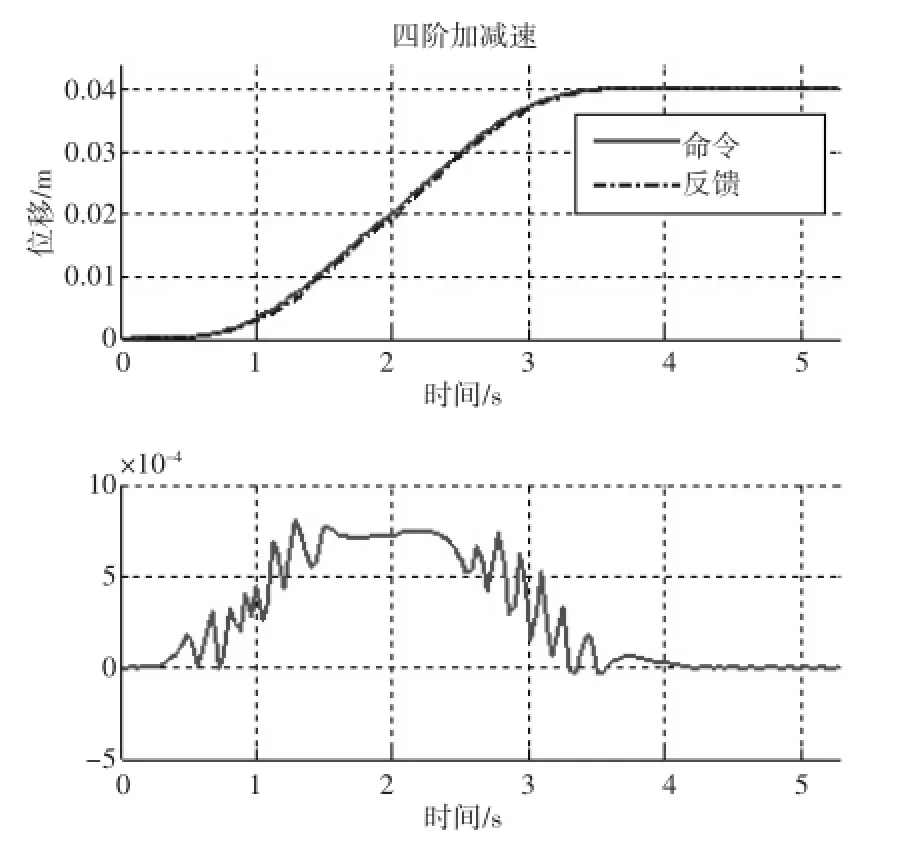
图2 位移跟随与跟随误差
4 结束语
本文基于FPGA设计和实现了运动控制系统,并利用了基于卷积的加减速控制方法,减少了计算复杂度。实验结果,验证了该运动控制系统的有效性与可行性,而且控制精度高。该运动控制系统,可在FPGA中扩展为两轴或多轴运动控制。
参考文献:
[1]施文龙,闵华松.工业机器人运动控制系统的设计与实现[J].自动化与仪表,2015,(5):37-41.
[2]荣盘祥,孙健鹏,董文波,等.基于DSP的运动控制系统设计[J].哈尔滨理工大学学报,2013,18(1):125-128.
[3]Lee A.Y.,Choi Y.Smooth trajectory planning methods using physical limits[J].Proceedings of the Institution of Mechanical Engineers,PartC:JournalofMechanicalEngineering Science,2015,229(12):2127-2143.
[4]Lee G.,Yi B.,Kim D.,et al.New Robotic Motion Generation using Digital Convolution with Physical System Limitation[C]. DecisionandControl andEuropeanControl Conference (CDC-ECC),2011 50th IEEE Conference on.IEEE,2011: 696-703.
中图分类号:TP271
文献标识码:A
文章编号:1672-545X(2016)04-0084-02
收稿日期:2016-01-27
作者简介:倪明仪(1985-),男,广西桂林人,本科,研究方向:设备检测与维护。
Design and Implementation of Motion Control System based on FPGA
NI Ming-yi
(Nanning Railway Bureau,Nanning Guangxi 530000,China)
Abstract:In order to improve the system performance and reduce the cost,this paper designs and realizes a kind of motion control system based on FPGA.It includes:Nios II softcore,PWM pulse generator,measurement unit,etc.. Trajectory generator is realized by convolution based acceleration and deceleration control method,resulting in improving the motion smoothness.The experiment results verify the feasible and effective of the motion control system.
Key words:FPGA;PWM;motion control
