旋转导向工具稳斜钻进井眼轨迹控制方法设计
2016-07-25吴文晋白玉新秦二卫
吴文晋,白玉新,秦二卫,张 达,王 恒
(中国运载火箭技术研究院第十八研究所 北京 100076)
·开发设计·
旋转导向工具稳斜钻进井眼轨迹控制方法设计
吴文晋,白玉新,秦二卫,张达,王恒
(中国运载火箭技术研究院第十八研究所北京100076)
摘要:提出了一种旋转导向工具在稳斜钻进作业时井眼轨迹控制方法。稳斜钻进作业中需要控制井斜和方位两个参数。控制方法由井下闭环和井上闭环两部分组成。井下闭环利用井下近钻头设备实时测量的井斜角信息,并通过液压控制系统闭环控制井斜,保证井眼轨迹在井斜方向按照井眼轨迹设计方向前进。井上闭环利用随钻测量设备向地面提供的井斜角、方位角信息,经过地面软件处理得到实钻轨迹并同设计轨迹进行比较,得出方位调整策略,通过数据下传技术下传到井下旋转导向工具,旋转导向工具依据方位调整策略进行扭方位操作,以保证实际轨迹和设计轨迹的重合。控制方法中根据导向能力需求不同,将导向力分成多个档次,以适应不同钻井条件下对全角变化率的要求。试验验证了控制方法的有效性。
关键词:定向钻井技术;旋转导向钻井;稳斜钻进;控制方法
0引言
随着油田开发程度的提高和生产的需要,定向钻井技术应用越来越广泛。旋转导向工具具有井下自动闭环、无需停钻等特点,具备了高机械钻速、高井眼轨迹控制精度、高工作可靠性等特征。其在水平井、大位移井、分支井、三维多目标井等复杂结构井的钻井过程中,可以有效地消除卡钻,具有提高机械钻速、减少井下事故、降低钻井成本的优势[1]。自从旋转导向工具投入使用以来,因为显著的钻井优势和经济效益,推动了钻井工程的发展[2]。
我国目前尚且没有商业化应用的旋转导向工具,但国内多家单位一直对旋转导向工具进行研究,并先后设计出样机产品进行试验[3]。旋转导向工具控制方法是进行钻井试验必须具备的技术,控制方法与导向工具的构成有直接关系。设计轨迹和实际轨迹的偏差是旋转导向控制的依据,井下工具需要受控于地面控制系统[4]。根据旋转导向工具具备双向通信能力,利用井上大闭环实现轨迹控制的技术,这种方式明显具有控制延后的缺点[5]。将井眼轨迹参数存储在井下控制器中,然后利用井下近钻头测量设备提供的测量参数绘制出实际轨迹参数,进行比较控制的方法,考虑目前设备对井深参数的测量较为困难,井下存储进行比较控制的方法实现难度大[6]。井下井斜、方位全闭环进行控制的方法,全闭环控制方法需要设备具有近钻头、高精度、实时测量能力,现在国内设备普遍不具备该能力,限制了全闭环控制方法的应用[7]。
目前我国一种旋转导向工具由近钻头执行设备加随钻测量设备(Measure While Drilling,MWD)组成,且近钻头执行设备具有井斜测量功能。本文结合现有控制方法提出一种稳斜钻进控制方法,该方法能够有效地解决近钻头执行设备+MWD旋转导向工具(以下简称工具)的控制问题。
1设备组成
工具主要由MWD设备、泥浆发电机、频率采集与无线通信模块以及位于近钻头执行设备端的测斜模块、无线通信模块、控制模块以及液压执行结构组成。另外地面系统包括MWD数据信息解码系统、数据下传控制软件及泥浆旁通阀组成。
在工具稳斜钻进作业中,井斜角和方位角均需要实时控制。而上述设备组合中只有近钻头井斜角是控制模块可以实时获得的,方位角信息需要由MWD测量。在工具旋转状态下MWD测量的方位角误差较大,控制模块此时与MWD通信获得的方位信息不准确,需要设计控制方法对稳斜钻进作业中钻进方向进行控制。
2控制方式
旋转导向工具在稳斜钻进过程中,实现轨迹控制的方式主要由两部分组成;一部分为井上闭环,另一部分为井下闭环控制。井上闭环采用人工干预的方式,例如偏差矢量的控制方法[5],通过对比设计轨迹和实测轨迹,根据二者差别给出方位和井斜控制策略,得出具体的钻井井斜角和增降方位决策。井下闭环控制将该决策通过输出液压力转换实现,以便控制钻头向目标方向钻进。即通过设定目标井斜和方位改变策略,实现稳斜钻进,保证钻出的实测轨迹和设计轨迹尽可能地吻合。
2.1井上闭环
井上闭环的具体实现过程流程框图如图1所示。通过地面软件计算实测轨迹和设计轨迹的差别。根据差别情况制定出稳斜钻进的稳斜角和扭方位控制策略,同时根据轨迹差别大小情况,制定造斜力及平移力的力度大小。造斜力为设备输出控制合力在垂线方向的分力,主要起到改变井斜的目的。平移力为设备输出控制合力在水平面上的分力,主要起到改变方位的目的。一般情况下,造斜力和平移力根据力度大小进行分级,以对应不同全角变化率要求。在制定完稳斜钻进角度值和方位角变化的方向后,设备根据造斜力和平移力情况实时稳斜钻进工作。工作过程中MWD实时反馈井眼轨迹情况,并根据变化情况,必要时将控制测量进行调整。井上闭环实现了方位控制和井眼轨迹控制两个目的。

图1 井上闭环实现过程框图
井上闭环控制中,使用MWD实时测量井眼轨迹情况,MWD将测量的结果通过MWD数据信息解码系统传递到地面系统中,供地面软件进行分析。地面人员需要根据分析情况,给出稳斜钻进的井斜角以及方位改变方向及力度,然后利用数据下传控制软件改变泥浆旁通阀工作状态,将数据编码信息下传到泥浆发电机。泥浆发电机由于流量发送变化,其工作频率也跟随发生变化。数据采集与无线通信模块检测泥浆发电机频率变化并将其转换为控制指令。通过无线通信功能传递给控制模块进行井下闭环控制。
2.2井下闭环
井下闭环的具体实现过程流程框图如图2所示。井上闭环中将目标井斜角和方位改变指令传递给控制模块。方位指令中包含增减方位及平移力度两种信息,目标井斜中包含目标井斜角和造斜力度两种信息。控制模块根据方位指令和目标井斜包含的信息计算出设备需要输出的液压合力F。

图2 井下闭环实现过程框图
(1)

考虑到设备所处的深度,输出的液压合力需要加上背景压力,并将目标压力发送到驱动控制器,驱动控制通过调节液压结构电机转速改变输出压力,并根据液压机构上的压力传感器形成压力闭环控制。井下钻进期间设备通过近钻头测斜模块实时测量实际井斜角,并反馈到控制模块中,进行井斜角控制闭环。井下闭环控制方式,实现了井下井斜角实时测量与控制。
3试验验证
为了测试稳斜钻进模式控制算法的有效性,工具在辽河油田前XX-XX井进行了井下试验。入井时井深989 m,井斜6.7°、磁方位55.9°。目标入靶井斜7.2°、目标磁方位51.2°。钻压3 t、泥浆密度1.3 g/cm3。单次入井纯钻时间25 h,工具记录工作时间57 h,钻进466 m。前XX-X井斜-井深图如图3所示。工具入井前采用弯螺杆进行井斜控制,井斜波动在1.2°左右,工具工作期间井眼轨迹井斜角波动缩小至0.2°左右,且实测井斜角方向更加靠近目标井斜7.2°,井斜稳定控制作用明显。
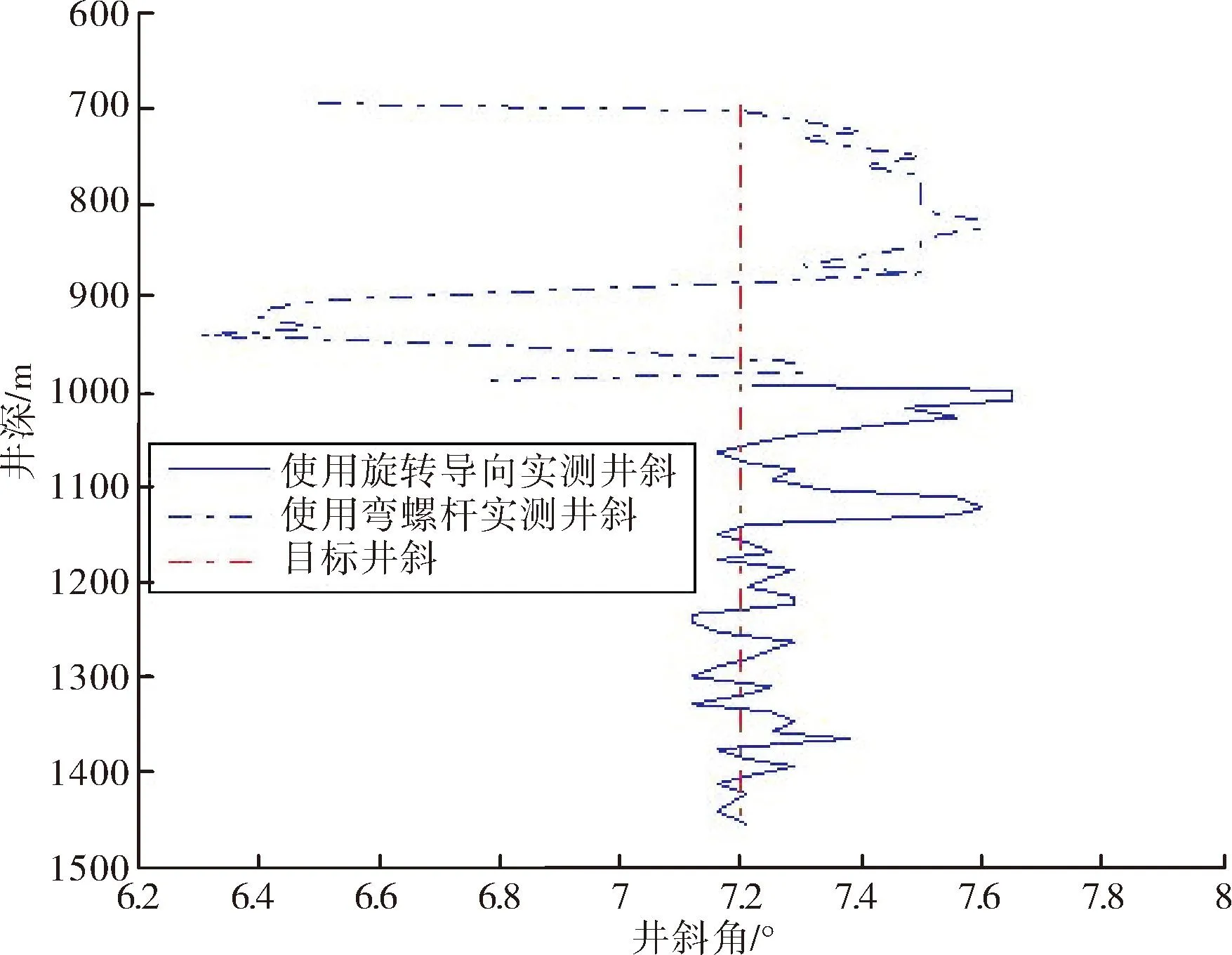
图3 前XX-XX井斜-井深图
方位控制效果如图4所示,图中将方位控制策略以台阶曲线形式给出,和目标方位重合部分为保持原方位,曲线在目标方位左边表示减方位,右侧表示增方位,曲线偏离目标方位的程度越大表示增或减方位力度越大。例如989~1 000 m阶段导向工具100%力降方位,实测磁方位1 020 m后迅速下降至42°。1 030 m后导向工具采用40%的力增方位,方位增加缓慢,之后采用60%增方位直至1 090 m,1 100 m时实测方位已经升至65°,出现明显超调。此后1 100 m采用40%力降方位,方位较缓慢下降。在1 120 m时方位下降到55°,此时改成保持方位策略。1 150 m时方位46°,超调减小。此后均采用20%~40%力调整方位。方位控制超调严重的原因主要有两种,一种是因为方位操作依靠井下到地面通信的大闭环,通信滞后历时较长。另一种为方位测量位置位于距离钻头12 m左右的MWD上,方位数据延迟。鉴于以上两种因素,为了更加准确地控制方位,需在地面控制策略运算中考虑方位增量。

图4 方位-井深图
4结束语
1)提出了一种旋转导向工具稳斜模式钻井控制方法;该方法经过试验具有较好的控制井斜及方位的能力。
2)试验中,方位控制由于井下地面双向通行时间滞后和MWD安装位置距离钻头有一段距离,单纯使用方位进行钻进方向控制容易出现超调量过大问题。
3)为了更好地控制方位,地面方位控制策略中后续需考虑方位增量因素,即原有地面方位的比例控制调整为比例+微分控制。
参 考 文 献
[1] 刘新华,董广华,赵洪山.旋转导向井下工具控制系统设计及室内试验[J].石油钻探技术.2011,39(5):86-89.
[2] Y Tetsuo,E Cargill,T Gaynor,et. Robotic Controlled Drilling: A New Rotary Steerable Drilling System for the Oil and Gas Industry[J]. SPE 74458,2002.
[3] 姜伟,蒋世全,付鑫生,等.旋转导向钻井技术应用研究及其进展[J].天然气工业,2013,33(4):75-79.
[4] 于文平,狄勤丰.闭环钻井井眼轨迹偏差矢量的控制方法[J].西北大学学报(自然科学版),2003,33(4):416-420.
[5] 李琪,杜春文,张绍槐. 旋转导向钻井轨迹控制理论及应用技术研究[J].石油学报.2005,26(4):97-102.
[6] 胡金艳,周静,付鑫生.用可控偏心器实现井眼轨迹的闭环控制[J].天然气工业,2002,22(6):58-60.
[7] Matheus J,Ignova M,Hornblower P.A Hybrid Approach to Closed-Loop Directional Drilling Control Using Rotary Steerable Systems[J].Automatic Control in Offshore Oil &Gas Production,2014,1(1):84-89.
Design of well trajectory control method for Rotary Steering Drilling System in steady inclined section
Wu Wenjin,Bai Yuxin,Qin Erwei,Zhang Da,Wang Heng
(China Academy of Launch Vehicle Technology 18thInstitute,Beijing 100076,China)
Abstract:A well trajectory rotary control method in steady inclined section during rotary steering drilling is proposed,which is divided into two parts,one is the underground closed loop,and the other is whole well closed loop.Using the information of the real time well deviation angle got from the instrument close to the drilling bit,the underground closed-loop can control the well deviation angle by means of the hydraulic control system to ensure well trajectory drilling in the designed direction.Compared the designed trajectory with the data got from the ground software processing the information of well deviation angle and azimuth angle provided by WMD,the whole well closed loop can get the azimuth adjustment value,which would be sent to downhole rotary steering drilling system to adjust the drilling direction and to ensure the designed trajectory consistent with the actual trajectory.Hydraulic force is divided into several grades in order to adapt to the different needs.The test results verify the feasibility of the control technology.
Key words:directional drilling technology;rotary steering drilling;steady inclined section;control technology
第一作者简介:吴文晋,男,1985年生,工程师,2010硕士毕业于北京航空航天大学机械电子专业,现在中国运载火箭技术研究院第十八研究所从事电子控制器软硬件设计工作。E-mail: tonylifewu@163.com
中图法分类号:TE271
文献标识码:A
文章编号:2096-0077(2016)03-0015-03
(收稿日期:2015-12-14编辑:高红霞)
