基于TLS的高压线塔倾斜度监测
2016-07-25刘云备蔡来良王姗姗杨望山
刘云备,蔡来良,王姗姗,杨望山
(河南理工大学 测绘与国土信息工程学院,河南 焦作 454000)
基于TLS的高压线塔倾斜度监测
刘云备,蔡来良,王姗姗,杨望山
(河南理工大学测绘与国土信息工程学院,河南 焦作 454000)
摘要::高压线塔属于杆状构筑物,对倾斜变形非常敏感,倾斜度是检测其稳定性的重要指标。传统的单点测量方式,无法反映高压线塔的整体变形,提出基于地面三维激光扫描技术监测高压线塔倾斜度的方法,采用分层处理的方式,通过边界提取、直线分割、直线拟合等过程处理点云数据。采集山西省柳林某高压线塔点云数据进行实验,求取各层切片的中心坐标并计算高压线塔的倾斜度,对计算结果进行分析,得出线塔仍处于安全运行状态的结论。
关键词:点云数据;点云切片;边界提取;边界分割;直线拟合
高压线塔是高压输电线路中与地面直接接触的构筑物,煤炭资源的高强度开采所造成的地表移动和变形会对其造成损害。根据有关规定220 kV以上高压输电线路铁塔属于Ⅱ级保护构筑物[1]。
地面三维激光扫描( terrestrial laser scanner,TLS) 技术直接、快速获取地物表面高精度、高密度的三维空间信息[2],技术上突破了传统的单点测量方法,是国内外变形监测领域关注的热点之一[3]。
三维激光扫描仪主动发射激光,接受物体的反射信号进行测距,同时获得扫描的竖直角和水平角,可求得物体在激光扫描坐标系中的三维坐标,获取目标物体的点云数据包括坐标、反射强度和RGB信息。
目前,高压线塔变形监测主要采用单点测量技术,例如王克东等[4]采用建立观测线和观测点的方法对采空区地表变形及铁塔倾斜进行监测。曹海林等[5]提出一种基于智能天线、扩频技术的超高输电塔变形测量方案。基于TLS的高压线塔倾斜度监测研究较少,戴靠山等[6]使用激光扫描技术对一座风电塔的外形进行扫描,利用扫描数据对风电塔的垂直度进行评估。
传统单点测量技术在监测范围、作业效率和外界环境需求方面存在一定的局限性,研究基于TLS的高压线塔倾斜度监测方法有较高的实用价值。根据高压线塔自身的结构特征,结合边界提取、直线分割、直线拟合等点云数据处理算法,完善高压线塔倾斜度监测的方法,并对监测方法进行验证。
1高压线塔点云数据获取
由于测区环境限制及RIEGL VZ-1000三维激光扫描仪的视角原因,单站不能采集高压线塔完整点云数据,在线塔周围3个不同位置设站进行数据采集。扫描仪进行数据采集时,无差别采集线塔点云数据、地表及植被点云数据等,需提取出线塔点云数据作为研究对象,高压线塔塔腿的4个基础为混凝土结构且高出地表,采用人工方法直接提取高压线塔点云数据。
激光扫描系统使用的是仪器自定义的坐标系统:X轴在横向扫描面内,Y轴在横向扫描面内与X轴垂直,Z轴与横向扫描面垂直[7]。每站扫描点云数据由于仪器架设位置不同导致坐标系统不相同,为将各站数据在相同坐标系下拼接成完整电力塔,选择第一站仪器坐标系作为基准进行拼接,结果如图1所示。
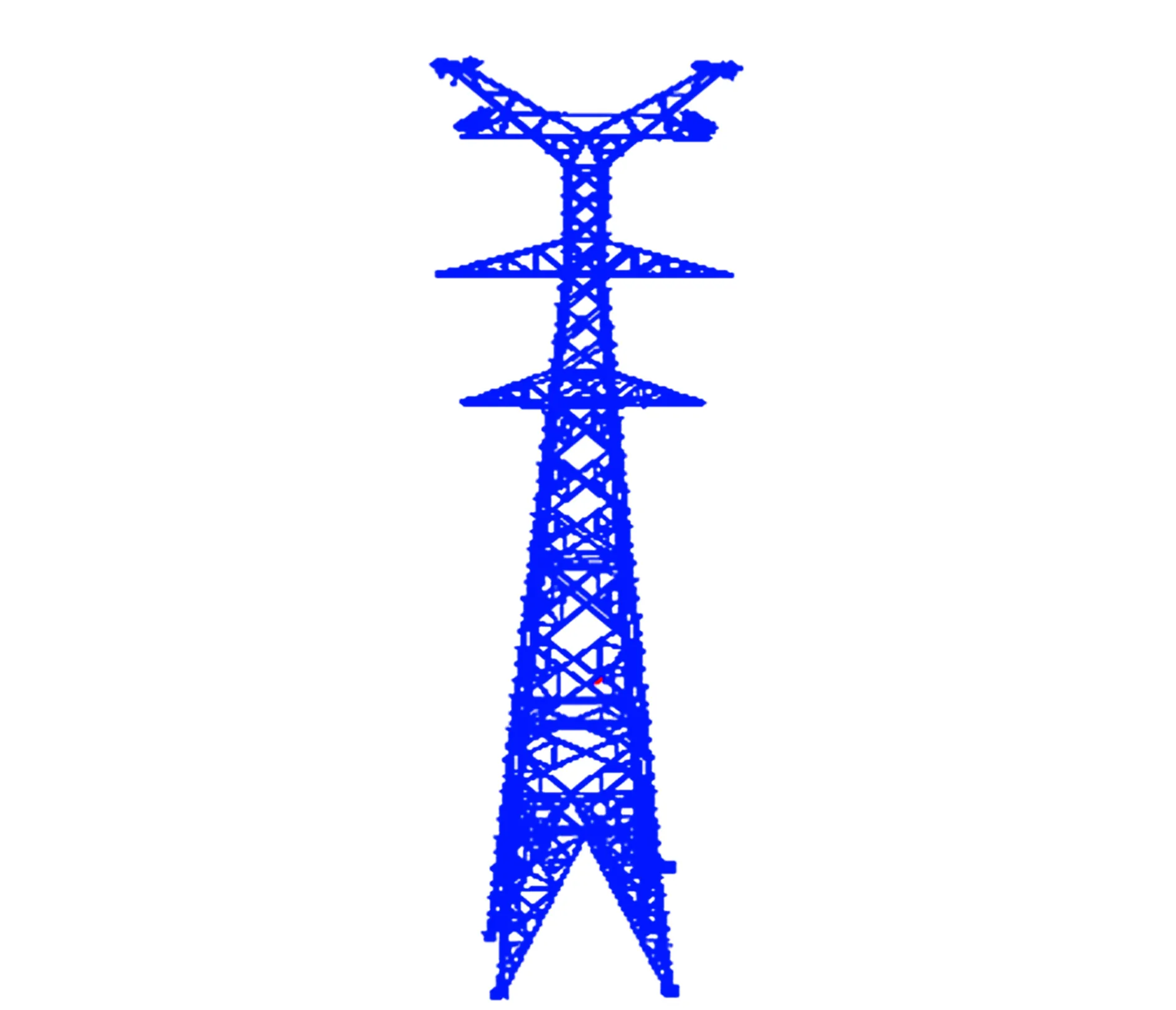
图1 高压线塔点云数据
2高压线塔点云数据处理
高压线塔属于点式高耸建筑物,输电铁塔基础规模相对不大、单塔占地面积较小,塔身同一高度处截面为矩形,对倾斜变形非常敏感。根据高压线塔的结构特点,提出线塔点云数据处理的流程,如图2所示。

图2 数据处理流程
2.1高压线塔分层
线塔点云数据量在七百万以上,数据处理过程复杂、时间长,且多数点云对研究结果无影响。采取分层的方式减少数据量,且点云切片从上到下能够反映线塔的整体情况。
线塔高度45 m左右,线塔包含的两个分支部分和塔顶都结构复杂且截面为不规则形状,不进行分层处理。从距线塔底部1.5~40 m处点云数据中,选取塔身部分按照步长1 m,切片厚度1 cm进行分层处理,共获得38个点云切片。计算每层点云切片的平均高程,将点云投影到平均高程所在的平面,分层结果如图3所示。

图3 线塔分层点云数据
2.2边界提取
AlphaShapes算法[8]、凸壳算法[9]、深度图像边界提取方法[10]可以用来从一堆无序的点集中进行几何形状的重建,采用AlphaShapes算法提取切片的边界点云数据。一些切片中间部分有交叉连接的角钢点云数据,经过边界提取处理,切片内部存在内边界点如图4(a)所示,这些内部边界点影响后续数据处理。切片外部边界轮廓为矩形,根据几何知识,矩形的内接圆与各个边界相切,采用切片内接圆的方式删除切片内部点云数据,处理结果如图4(b)所示。具体过程:
1)计算切片的Xmax,Xmin,Ymax,Ymin对应的点坐标;
2)计算切片内接圆半径r及圆心坐标;
3)计算切片点云与圆心的距离d,当d>0.4r时,保留该点。

图4 边界点云提取子处理
2.3边界分割
点云切片外轮廓线由4条直线组成,需要进行边界分割,才能进行直线拟合等后续操作。处理数据过程中采取坐标旋转和Hough直线提取两种方法进行边界分割。
1)坐标旋转。线塔点云数据采用扫描仪坐标系统,采集数据时仪器架设位置与线塔正面有一定的角度,导致切片边界与坐标轴存在一定的夹角。选取切片左下角点作为固定点,切片上其它点绕固定点旋转角度θ,使切片四边界分别与X轴、Y平行。旋转后点云x,y坐标变化,z坐标不变。点云坐标求解:
(1)
式中:(x1,y1)为切片上点旋转前坐标;(x,y)为切片点云旋转后坐标;(x2,y2)为固定点坐标。求L1=Xmin,L2=Xmax,L3=Ymin,L4=Ymax4条直线作为边界分割的直线。
采用坐标旋转的方法进行边界分割存在一些问题,坐标旋转后求出点的坐标,还需在进行反向旋转,转换过程中存在一定的误差,有些切片存在边角缺失的情况无法进行坐标旋转。
2)Hough直线提取。Hough 变换是图像处理领域中用于目标检测的一种常用方法,是图像空间和参数空间之间的一种变换,能够用来检测直线、圆、椭圆等几何曲线。詹庆明等[11]应用 Hough 变换从古建筑激光扫描点云数据中提取线性特征,证明Hough变换适合于提取线性特征。Hough变换提取直线的参数方程:

(2)
首先将θ离散化,取遍所有值,然后按照式(2)计算出相应的ρ值,然后再对累加数组A(ρ,θ)累加,由A(ρ,θ)的值得到共线点的个数。A(ρ,θ)中值最大的参数即为要检测直线的参数。切片外轮廓线为矩形,4条直线中相对的两条边界直线参数相近且相隔一定的距离,为了分割出需要的直线,采用改进的Hough变换[12]方法提取切片外轮廓线,设置角度α和距离d两个参数,分割结果如图5所示。具体过程:
1)基于改进的Hough变换方法,保存多条满足条件(点个数)直线参数。
2)选择共线点最多的直线参数,做为第一条边界L1的参数。
3)找出与L1夹角大于α或者距离大于d的直线参数作为第二条边界L2的参数,依此找出L3,L4的直线参数。
4)对L1,L2,L3,L4直线参数(ρ,θ)按照θ从小到大进行排序,便于后续数据处理。

图5 边界分割结果
2.4直线拟合及切片角点计算
直线拟合的常用方法有最小二乘法、整体最小二乘[13-14]、稳健整体最小二乘[15]等。最小二乘法,仅考虑自变量中的误差,从而导致自变量、因变量选择不同时,拟合直线结果不同;整体最小二乘法,同时考虑自变量与因变量中的误差,但是并没有考虑到数据中可能存在的粗差或异常值;稳健整体最小二乘法在考虑全部观测量存在误差的情况下,通过利用一定的准则删除数据中的粗差或异常值,从而获得稳健的直线参数。直线分割过程中一些切片的边角缺失,最终获得35个切片边界分割结果,采用稳健整体最小二乘方法对分割后的边界进行拟合,结果如图6(a)所示。根据拟合的直线参数,相交直线计算切片角点坐标和切片中心坐标,线塔整体线框图如图6(b)所示。
3数据处理结果与分析
以底层切片中心为基础,认为未发生偏移,计算底层的切片中心点坐标,其他各层中心坐标与底层中心坐标求x,y差值,按照杆塔倾斜度计算式(3)求各层倾斜度,计算结果如表1所示。

(3)
式中:G为倾斜度,E为倾斜后偏移距离,H为对应的高度。根据DL/T741-2010《架空输电线路运行规程》,正常杆塔倾斜最大允许值如表2所示。
根据计算结果制作了各层中心偏移距离如图7(a)和各层倾斜度图7(b)所示。

图6 直线拟合与线塔整体效果

表1 线塔各层中心坐标及倾斜度计算结果 m

续表1 m

表2 正常杆塔倾斜最大允许值
1)由表1可知,在x方向上大部分切片中心向x的正方向偏移,在y方向上都向y的负方向偏移,且x方向偏移量均小于y方向偏移量
2)由图7(a)可知,随着切片距线塔底部距离的增大,切片中心偏移距离逐渐增大,线塔倾斜度集中在0.7%~0.8%之间。
3)线塔高度在45 m左右,由表1、图7(b)和表2可知,线塔的最大倾斜度低于规定的最大值,线塔处于安全运行状态。

图7 线塔偏移距离与倾斜度
4结论
1)将地面三维激光扫描技术运用到高压线塔倾斜度监测中,克服传统监测手段的不足,能够对高压斜塔的整体倾斜度进行监测,并实地采集高压线塔点云数据进行计算、分析,验证方法的可行性。
2)针对高压线塔自身结构特点,采用分层处理
的方法,根据已有的边界提取算法(对于内部边界点采用内接圆的方式进行删除)和直线提取算法(切片外轮廓为矩形,设置角度和距离参数提取切片边界),完善基于地面三维激光扫描技术的高压线塔倾斜度监测方法。
参考文献:
[1]国家煤炭工业局.建筑物、水体、铁路及主要井巷煤柱留设与压煤开采规程[M].北京:煤炭工业出版社,2000:5-5.
[2]万怡平,习晓环,王成,等. TLS 技术在表面复杂文物三维重建中的应用研究[J]. 测绘通报,2014(11):57-59
[3]罗德安,朱光,陆立,等 .基于三维激光扫描技术的整体变形监测[J].测绘通报,2005(7):40-42.
[4]王克东,古广林.煤炭采空区输电线路塔基变形监测及治理[J].岩土工程技术,2011,6(3):04-07.
[5]曹海林,杨力生,尹朋,等.基于智能天线的超高输电塔变形监测技术[J].电力自动化设备,2010,30(5):38-41.
[6]戴靠山,徐一智,公羽,等.三维激光扫描在风电塔检测中的应用[J].结构工程师,2014,30(2):111-115.
[7]郑德华,雷伟刚.地面三维激光影像扫描测量技术[J].铁路航测, 2003(2): 26-28.
[8]沈蔚,李京,陈云浩,等.基于LIDAR数据的建筑轮廓线提取及规则化算法研究[J].遥感学报,2008,12(5):692-698.
[9]赵军,曲仕茹.平面点集凸壳的快速算法[J].计算机工程与应用,2009,45(1):56-58.
[10] 何丽,李嘉,郑德华.基于栅格的点云数据的边界探测方法[J].测绘工程,2013,22(3):69-73
[11] 詹庆明,周庆刚,肖映辉.从激光点云中提取古建筑线性和圆形特征的比较[J].武汉大学学报(信息科学版),2011,36(6):674-677.
[12] 张云鹏.三维激光扫描数据同名特征点提取研究[D].徐州:中国矿业大学,2014.
[13] 丁克良,沈云中,欧吉坤.整体最小二乘法直线拟合[J].辽宁工程技术大学学报(自然科学版),2010,29(1):44-47.
[14] 王继刚,周立,蒋挺臣,等.一种简单的加权整体最小二乘直线拟合方法[J].测绘通报,2014(4):33-35.
[15] 官云兰,周世健,张立亭,等.稳健整体最小二乘直线拟合[J].工程勘察,2012(2):60-62.
[责任编辑:李铭娜]
DOI:10.19349/j.cnki.issn1006-7949.2016.08.014
收稿日期:2015-10-20
基金项目:国家测绘局测绘地理信息公益性行业专项资助项目(201412020);河南省高等学校重点科研计划项目(15A420005);河南理工大学博士基金资助项目(B2012-004)
作者简介:刘云备(1990-),男,硕士研究生.
中图分类号:P234.4
文献标识码:A
文章编号:1006-7949(2016)08-0065-05
High-voltage line tower inclination monitoring based on TLS
LIU Yunbei,CAI Lailiang,WANG Shanshan,YANG Wangshan
(School of Surveying and Land Information Engineering,Henan Polytechnic University,Jiaozuo 454000,China)
Abstract:High-voltage line tower belongs to the rod struction, which is very sensitive to the inclination deformation. The inclination detection is an important indicator of its stability. The traditional single point measuring method cannot reflect the overall deformation of the high-voltage line tower. A method based on TLS is proposed to monitor the high-voltage line tower inclination by using the method of hierarchical processing, by the boundary extraction, line segmentation and line fitting process point cloud data. Collecting a high-voltage tower point cloud data of Liulin County of Shanxi Province to carry out experiments, calculating the center coordinates of each layer slice and high-voltage transmission line tower inclination, analyzing the calculation results, it shows that the line tower is still operating in safe conditions.
Key words:point cloud data; point cloud slice; boundary extraction; line fitting; boundary segmentation
