基于最小二乘拟合LiDAR点云滤波改进算法
2017-06-22周长江何永钟
周长江+何永钟


摘 要:针对传统的使用单一拟合法滤波的不足,提出组合曲面拟合滤波方法。通过引入虚拟网格点方法,改进数据预处理方法,在剔除掉粗差点云后,选用较为准确的多面函数拟合,更好的表达地形起伏细节,逼近真实地形表面,进行二次滤波。实例证明与ISPR公布的经典滤波算法相比,该组合最小二乘拟合的点云滤波效果较好,可用于生成准确的DEM。
关键词:点云数据 多面函数 最小二乘 滤波
中图分类号:P237 文献标识码:A 文章编号:1672-3791(2017)05(b)-0240-03
LiDAR点云除去地面点外,还含有树木、建筑物、桥梁、车辆等信息,真实的DEM数字高程模型需要过滤掉非地面点。目前,点云过滤方法主要基于形态学、基于坡度、基于内插、基于移动曲面拟合等算法。在总结对比分析这些算法基础上,该文通过将最小二乘与多面函数拟合两种方式相结合,目的为尝试获取更加准确的DEM。
1 最小二乘拟合法滤波
二次曲面拟合可以从总体上表示地形走势,而多面函数能较好地体现地形细节,但由于其拟合精度受节点影响较大。该文通过将两种方法结合,首先对点云进行预处理,再将二次曲面拟合获取大致趋势面并去掉较大误差点,为多面函数拟合提供精度较高的可选拟合点;然后利用多面函数拟合滤波去除非地面点。
1.1 二次曲面拟合
针对高程变化不大区域,可用二次曲面进行模拟,拟合之数学模型为[2]:
2.2 多面函数拟合
设在测区域内有m个已经测点云S(x,y),标记成数据点(x,y,s),Si为点(xi,yi)上的观侧值。用n个核函数的总和去逼近函数S(x,y)[3],即:
其中,表达选择地节点坐标,运用最小二乘法可以求出系数α的值。
2 方法原理与实现
2.1 点云数据预处理
该文通过对单一阈值法进行改进,目的是在数据预处理环节剔除低位误差。数据处理过程包含两步:(1)首先假定一个窗口区域,将该区域内几何中心点与其他的激光脚点进行高程跳变检测,对比高程的最小差值与所设置的阈值,当中心点与其他点的最小差值大于阈值时,认定为是粗差点;(2)第二步继续对点云数据集进行搜索,通过设定阈值作为判定条件,如果搜索到的点相对较集中并且符合判定条件,则认定该点集内的点为粗差点。
2.2 点云格网化分割
机载LiDAR点云数据量比较庞大,曲面拟合时,需要先选取一定量的地面点作为拟合点。首先将预处理后的点云进行格网化,分隔成若干个单元格,用每个单元格中最点作为地面点参与拟合。具体的划分步骤包括:
(1)对于点云数据,搜索Q中所有点的二维方向的最大值最小值,即、、、。
(2)单元格之划分应根据扫描区域点云的密度D来确定,单个正方形单元格的最低长度应为 m。对LiDAR点云数据进行格网化,沿x,y方向分割成mm个小的单元,网格边长分别为,即:
(3)确定每个单元格的边界。通过定义单元格编号来明确各单元格边界及范围内需要扫描点。边界涵盖了x、y两个方向的上下界。
(4)逐个搜索单元格内高程值最小点。在对点云进行网格分割之后,会不可避免地出现部分单元格为空值的情况,所以人为去掉这些单元格是十分必要的。然后,在剩余的单元格中逐个搜索高程值最小点,用于最小二乘拟合。
2.3 自适应阈值确定
二次曲面拟合之后,原始地面点高程值与拟合高程值是相对比较接近的,对于非地面点而言仍具有较大的高差。该文选用一种局部自适应阈值方法,阈值的选取采用每个单元网格内高程最大值减去最低点后乘以一个系数。即:
Factoy的取值由格网内地形起伏决定,即统计每个格网内高程数据求算平均坡度。
2.4 曲面拟合滤波
采用点云格网化分割算法选取适量拟合点,基于前面流程进行两次拟合滤波。首先将拟合二次曲面作为趋势面,采用自适应阈值,剔除高差大的点; 然后在第一次滤波的基础上再选取部分节点,进行多面函数拟合,此时该多面函数可以精确地表达某些细节部分,滤除非地面点。
3 滤波试验与结果分析
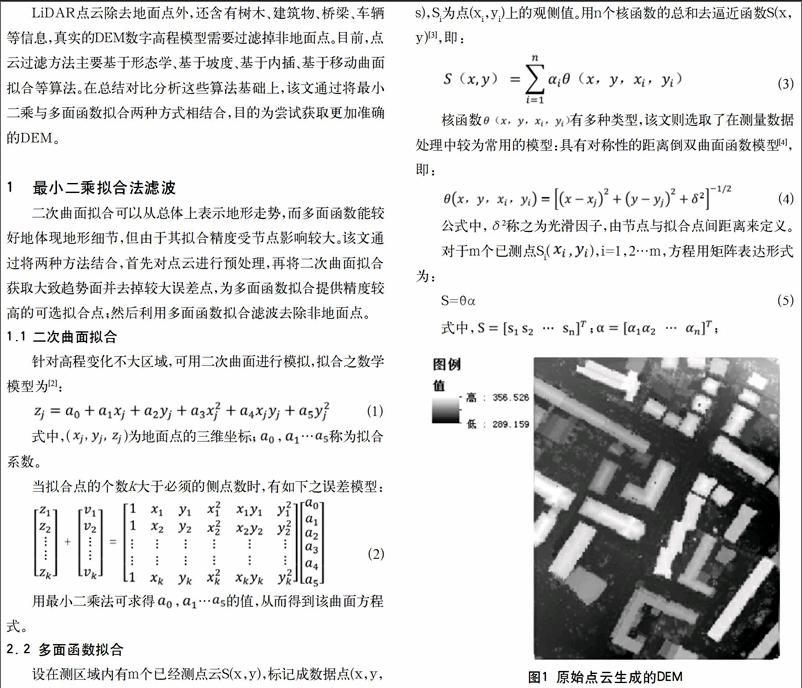
该文的实验数据来自2003年ISPRS (国际摄影测量与遥感协会)第Ⅲ工作小组提供的比较实验数sample12,该样例数据扫描区域内地形相对比较复杂点,建筑物及树木、植被地形要素较多。区域大小约为204 m×264 m,点云密度为0.67 points/,点云总数为52 119。基于原始点云数据通过内插生成DEM,见图1。因建筑物、树木、植被等噪声点分布于整个测区,生成的DEM精度较差,与实际地形不符。
利用直方图对原始地点云高程值进行数理统计(见图2),从样例数据点云高程直方图上可以直观看出:Sample12存在着较为明显低位粗差点。因此采用改进的单一阈值法先对样例数据进行预处理,剔除低位粗差点(见图2)。参数设置为:窗口半径设置为10 m、高程阈值设值为2 m、粗差点集最大允许包含数为6个,共有25个粗差点从样例数据中剔除。
由于两个激光点距离过远时,对拟合值的影响较小,且拟合点数过多时,一定程度上也会影响效率。因此,实际处理时也要先对点云坐标进行统计,进而将点云集合分隔成10×10的格网,选择格网中最低点参与初次拟合。该文实际用于拟合的点数为100,得到如图3所示的二次曲面。通过得到的二次曲面,根据每个格网地形坡度设定相应的阈值,滤除大部分的建筑物及植被等非地面点。
点云完成第一次拟合过滤后,从剩余点云集合中,选取多面函数拟合节点,进行试验比较。由于拟合点数量相对较多,节点的位置分布对拟合的结果影响并不大,因此可以在区域内随机选取分布较为均匀的节点。多面函数核函数选用距离型倒双曲面模型,进行多面函数拟合滤波。经过两次去噪后,剩余的点数为26 144。由滤波后的点云生成该区域DEM,该文还采用了定量分析的方法进行该滤波算法的评价。机载激光雷达数据滤波中,存在两类误差:第Ⅰ类误差是地面点被误分为非地面点的百分比,第Ⅱ类误差是非地面点被误分为地面点的百分比,第Ⅲ类误差为总误差,即被错分的点占整个数据的百分比。统计选用的sample12滤波后各类误差,将各类误差与ISPRS公布的8类经典算法做了比较,见表1。
由表1分析可得,该文滤波算法与8类经典算法相比:第Ⅰ类误差显著减小,第Ⅱ类误差也不会明显增大,同时总误差也都相应有所减小,滤波结果较好,生成的DEM也能很好地反映区域地形变化。
4 结论
(1)对于传统的移动曲面最小二乘滤波只适用于较小区域滤波,而且过分依赖所取曲面种子点,该文将两种拟合方法相结合,利用二次曲面和多面函数的不同特点对扫描区域进行了拟合去噪,取得了较为理想的效果。
(2) 改进了单一阈值法,剔除了低位粗差点的影响;并改进了点云格网化分割算法,根据区域特点将区域先进行二维划分,再考虑第三维,单元格形状和大小的选取则视扫描区域范围而定,这可为两次拟合提供满足要求的拟合点。
参考文献
[1] 严剑锋,邓喀中,邢正全.基于最小二乘拟合的三维激光扫描点云滤波[J].测绘通报,2013(5):43-46.
[2] 房华乐.面向对象的车载LiDAR点云滤波方法[J].测绘科学,2015(4):92-96
[3] 张菊清,刘平芝. 抗差趋势面与正交多面函数結合拟合DEM 数据[J].测绘学报,2008,37(4):526-530.
[4] 王新洲,陶本藻,邱卫宁,等.高等测量平差[M].北京: 测绘出版社,2006.
