基于激光扫描数据正交投影分析的建筑物提取研究
2017-05-11娄静谊
娄静谊


摘要: 激光扫描点云数据可以利用特定直观程序进行投影,帮助理解理数据中的建筑物结构。这类程序已经被广泛应用到自动建筑物模型建模中。该方法从高度直方图面元的分析中导出建筑物方位,并利用该方位产生点云的正交二维投影,其中屋顶平面作为点云的线。通过线跟踪算法提取表示这些平面的线段。在随后的处理步骤中,对线段进行延伸刨平,并且平面被用于分析与矩形形状的偏差。将两个或更多相邻平面分组以生成三维建筑模型。现有二维GIS数据可以用于该过程中以提供机载激光扫描数据集的可靠分割并且支持生成实际建筑物建模的假设。
Abstract: Laser scanning point cloud data can be projected using a specific intuitive program to help understand the structure of the data in the building. Such procedures have been widely used in automated building modeling. The method derives a building orientation from the analysis of a high-degree histogram bin and uses the azimuth to generate an orthogonally two-dimensional projection of the point cloud, where the roof plane is the line of the point cloud. The line segments representing these planes are extracted by a line tracking algorithm. In the subsequent processing steps, the line segments are stretched and the plane is used to analyze deviations from the rectangular shape. Two or more adjacent planes are grouped to generate a three-dimensional building model. Existing 2D GIS data can be used in this process to provide reliable partitioning of the onboard laser scan dataset and generate hypotheses that support realistic building modeling.
关键词: LiDAR;点云数据;分割;建筑模型建模
Key words: LiDAR; point cloud data;segmentation;building model reconstruction
中图分类号:TP391.4 文献标识码:A 文章编号:1006-4311(2017)14-0147-03
0 引言
激光雷达Lidar在最近十年间崭露头角并逐渐进入主流的一种遥感技术,它实用性强,比如用于DEM提取和三维建模等。甚至国外已经用Lidar实现了城市三维模型建立。Lidar直接测得带有地理坐标的密集点云,并不能直观地给人们描述其所需要认识的研究对象,为此往往需要对点云进行一系列的处理,然后方能提取出人们想要得到的信息。
目前,关于点云的处理已经有多种的流程和框架,其中点云分割技术就是期间重要的一步。通常只有在完成点云分割技术处理之后才能再进行建模、三维建模。本研究中涉及的点云数据的建筑物重建技术,从高度直方图面元的分析中导出建筑物方位,并利用该方位产生点云的正交二维投影,其中屋顶平面作为点云的线。通过线跟踪算法提取表示这些平面的线段。最后矫正偏差,重建模型[1]。
1 基于二维GIS数据的分割
良好的机载激光扫描点云数据集分割是应用3D建筑模型生成方法的关键前提。基本上,激光扫描点云数据的分割可以基于数据本身进行,或者结合其他信息源,例如现有的2D GIS数据或高分辨率航空影像。
在理想条件下,可以在激光点云数据中检测建筑物,执行简单的高度阈值处理,结合对数据集的每个点的第一个和最后一个的间隔差进行分析。假设建筑物和树木有着显著大于地形的高度,第一个和最后一个点的间隔差在高植被覆盖区域将存在明显差异[1]。如果应用于原始数据,则可通过TIN结构中的连续性分析来检测和分割建筑物。如果应用于被压缩到规则格网下的激光扫描仪的高度数据,则该过程可以生成掩模用于数据中表示各个建筑物的切割点云。在具有非平坦地形的区域总,阈值处理的首位间隔差分法可以应用于归化数字表面模型,该模型基于滤波数字表面模型[2]。
如果只基于激光扫描仪数据获得的分割质量会受到数据集的复杂性限制。在具有相当复杂地形的地区,靠近建筑物的密集植被覆盖区域或内城区,这类方法的成功率较低,从而限制了3D建筑模型自动生成方案的适用性。用于分割处理的信息主要来自于2D GIS数据。在大多数地区,这类数据可以通过地籍数据或从数字化地图获得。该类型数据交互操作时已将注视加入原始数据源中,可靠性较高。另一方面,这种技术受限于地区二维GIS数据的完整性、精确性和可靠性以及更新频率。此外,大部分基于此类数据的分割过程将不能用恢复,并且多数不考虑房屋的突出部分。
在瑞士,分米级精度的数字二维地类数据可以在大多数地区使用。该数据用于研究区域内机载激光扫描数据的分割。通过单独处理每栋建筑物地平面多边形并在多边形中测试其包含的数据点来实现分割。由于研究区域的特点是建筑物具有大的屋顶悬垂,在每个多边形周围定义一个5米的缓冲区,以便悬挂区域的屋顶点不被处理成噪音点(图1)。同时,缓冲區域允许建模程序从包含地面在内的泛化效应恢复。该过程可通过ArcMap插件实现。在实际建筑物建模时消除包括缓冲区在内的附加地面或植被点。接地点可以在建模时用于定义地形级别。连接的区段需要切断缓冲区,只有邻近建筑物附近地面点可以在两个区段之间共享。
2 基于二维GIS数据的方位分析
除了区域数据对点云数据进行分割之外,还可以从实验区域数据中到处支持建筑物建模过程的附加信息[3]。以及使用一种分割复杂实验区域并使用这些部分来限制搜索区域并进行三维霍夫变换以提取屋顶平面的技术[4]。
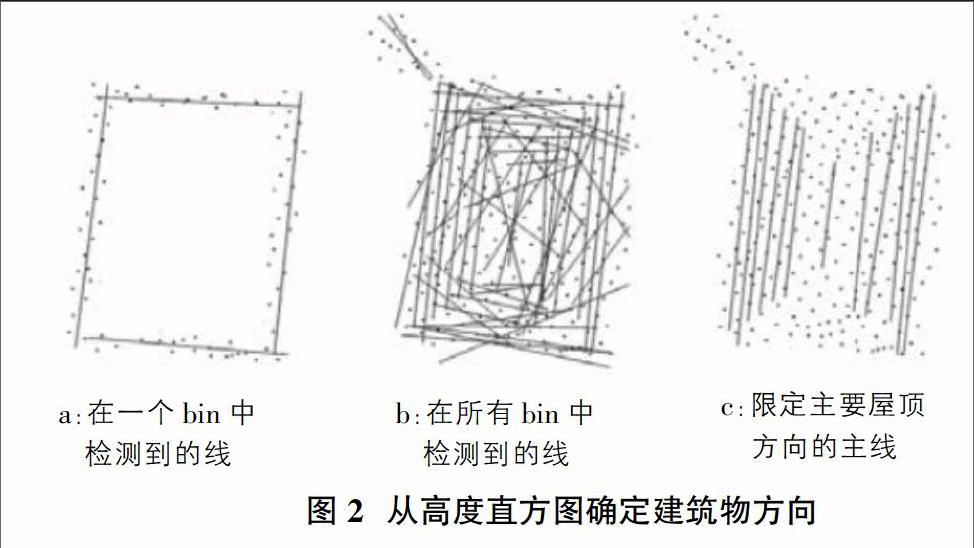
屋顶平面通过分割点云的特定正交二维投影和随后的线检测过程来检测。这种方法需要建筑物方向的信息,其可以通过对高度直方图元中的线搜索的结果分析,从激光扫描仪数据本身导出[5]。(图2)。
在具有许多上部结构的屋顶情况下,该过程可能产生不理想的结果。在这些情况下,从建筑物实验区域导出的建筑物取向可以支持屋顶建模。为此,执行长度加权的方位角聚类分析,产生由地平面图(图3)中的最长线定义的建筑物的主方向。
从地平面导出的该建筑物方位角可以仅用于进一步建模处理,或者可以用于验证从高度直方图面元分析导出的方位。由于上述过程在复杂地面计划的情况下不会总是检测到正确的主方向,因此后一种方法将产生更可靠的结果。在高度直方图单元方向分析中的清晰最大值的情况下,最接近从高度单元导出的定向角的地平面取向被选择为主要建筑物取向,而在高度直方图单元方向分析的不理想结果的情况下,主要建筑方向是从实验区域方向分析。
3 特定正交点云投影的建筑物建模
本文提出的三维建筑物模型自动建模的方法基本思想来源于注释表示建筑物点云时,操作者的基本操作方式:用户旋转点云,正交投影平行于屋脊,来识别房屋结构。屋顶平面在该投影中投影成线,从而允许识别平面的宽度和倾斜。这种面向用户的交互过程在相应的建筑建模方案中有细节描述[6]。
消除地面点噪音:
通过局部高度直方图分析,利用在建筑物墙的高度范围内的直方图最小值来消除来自分割过程的缺陷或从建筑物地平面周围限定的缓冲器剩余的接地点,以导出高度阈值。
确定屋顶方向:
对于点云的特定正交2D投影所需的主要屋顶取向可以从高度直方图面元分析或从如第3章中描述的地面平面的分析获得。点云由建筑物旋转方位并投影到XZ平面(图4)。
通过与建筑物方位角相加90°来执行进入YZ平面的第二正交投影。 当假定具有一个或两个正交的屋脊方向的建筑物时,这两个突起将以投影线显示所有屋顶平面。可选择性添加多个45°的投影以覆盖更复杂的屋顶形状。
2D投影中线的检测:
在点云的2D投影中执行线检索,以便检测表示屋顶面的线(图5)。线检索从接地点消除后的局部点云的最低点开始。如果在该点上方居中的框中,点的数量超过特定阈值,则使用鲁棒性估计将线拟合到这些点中。 在下一步中,该线被外推以收集对该线有贡献的附加点。如果最低点无法产生线,则返回并从下一点重新开始。
线的梯度和长度定义屋顶平面的倾斜度和宽度(图6)。表示相邻屋顶平面的线在点上相交。交叉点代表屋顶的脊。在屋脊附近结束的提取线长度被缩短或延长到交点。
屋顶平面的生成:
属于线的所有点旋转屋顶倾角D,并投影到Y-Z平面中,在那里它们形成水平线。 该线的长度表示屋顶表面的长度。 图7示出了从单个投影导出的屋顶面提取的3D多边形。
非四边形屋顶平面:
考虑到数据集的平均点密度(图8),通过该过程产生的矩形屋顶面投影到X-Y平面内点的条带分析来检查切除。
建筑模型生成:
在下一步骤中,各个平面可以结合屋顶结构。此时会有,共享脊线的相邻屋顶平面相交(图7)。此外,源自两个正交投影的平面必须相交。这就是屋顶的建模。
在下一步骤中,通过将屋顶边缘投影到地形模型上来重建建筑物的墙壁。为了简单起见,选择建筑物附近的最低点来表示建筑物足点高度。为了视觉目的,可以在墙壁的重建中考虑屋顶突出。如果有土地规划信息可用,屋顶悬垂的大小可以从屋顶轮廓和土地规划之间的差异导出。或者,可以从地平面本身重建墙壁。如果没有可用的土地规划信息,则可以假定为平均屋顶突出。
多边形被分组到多面体建筑模型并被可视化(图9)。
4 适用性检测
第1-3部分所示的方法已在瑞士卢塞恩地形图的激光扫描仪数据集上进行了实际测试。 数据集特征为每1.5平方米一点的平均点密度和高度20cm的标准偏差。该数据集中,选择了六个探测器,总共250个建筑物代表不同类型的建筑类型和建筑布置。 2D数字地籍数据可用于整个测试区域并且用于如上所述的分割和建筑物取向确定。
5 结果分析
在分段激光掃描点云的特定正交投影中,2D线检索的方法已被证明是用于从机载激光扫描器数据生成3D建筑模型的通用且强大的途径。现有的2D GIS数据可以用作将激光扫描器数据分割成要通过该方法建模的单个建筑物局部点云的可靠工具。 2D GIS数据也可以用于通过定向假设生成来支持3D建筑重建过程。
成功重建的建筑物成功率在具有复杂建筑物的地区中为40-50%,在新建住宅区中接近100%。未来将扩展2D GIS数据的使用,以确定屋顶悬垂,改进非四边形屋顶平面的形状确定和平面分组假设的生成。
参考文献:
[1]钟良.LiDAR同机影像辅助点云分类相关技术研究[J].武汉大学,2010,24(5).
[2]惠振阳.胡友健.基于LiDAR数字高程模型构建的数学形态学滤波方法综述[J].激光与光电子学进展,2016(08).
[3]管海燕.LiDAR与影像结合的地物分类及房屋重建研究[D].武汉大学,2009.
[4]杨斌.机载LiDAR点元数据建筑物半自动提取方法研究[J].辽宁工程技术大学,2011.
[5]赵明波,何峻,田军生,付强.基于改进的渐进多尺度数学形态学的激光雷达数据滤波方法[J].光学学报,2013(03).
[6]孙美玲,李永树,陈强,蔡国林.基于迭代多尺度形态学开重建的城区LiDAR滤波方法[J].红外与激光工程,2015(01).
[7]欧新良,匡小兰,倪问尹.三维散乱点云分割技术综述[J].湖南工业大学学报,2010,24(5).
[8]Shapiro L G,Sthockman G C,et al.Computer Vision[M].Prentice Hall,2008.
[9]徐玉军.基于机载激光雷达点云数据的分层道路提取算法研究[D].吉林大学,2013.
[10]李杰,程效军.三维激光扫描仪在墙面平整度检测中的应用[J].井冈山大学学报(自然科学版),2014(04):13-17.
