误差自补偿阴极保护电源
2016-07-24李林泽曾周末李健
李林泽,曾周末,李健
(1.天津大学精密测试技术及仪器国家重点实验室,天津300072;2.中国卫星海上测控部,江苏江阴214431)
误差自补偿阴极保护电源
李林泽1,2,曾周末1,李健1
(1.天津大学精密测试技术及仪器国家重点实验室,天津300072;2.中国卫星海上测控部,江苏江阴214431)
针对常规阴极保护电源不能控制断电电位的缺陷,提出一种基于预测的控制电位误差补偿方法。首先,分析电化学体系过电位与电流密度的关系,在此基础上推导出控制电位的预测方法;其次,针对阴极保护工程提出了对应的控制策略,得到了一种优于传统方式的保护电位控制方法;最后,设计了具有误差自补偿功能的阴极保护电源,并投入应用。实验结果表明,该方法可靠有效,能显著提高保护电位的控制精度。
阴极保护;恒电位仪;IR降;断电电位
据统计,腐蚀给各国带来的经济损失约占其当年国民经济生产总值的1.5%至4.2%。《中国腐蚀调查报告》中指出,近年来我国因腐蚀而带来的损失更为巨大,约占国民经济生产总值的5%[1-2],因腐蚀而造成的损失不可估量。阴极保护是金属防腐蚀的重要方法,评价阴极保护效果关键参数是保护电位,中国石油行业标准SYJ36—89对钢铁构件的规定[3]:施加阴极保护时被保护构件的电位应负于-850 mV(相对饱和硫酸铜参比电极),测量过程必须消除电解质中IR降、杂散电流等因素造成的误差。在我国,常用恒电位仪做阴极保护电源,恒电位仪可控制金属的保护电位,实现保护电位恒定,但是,常规恒电位仪只能恒定通电电位,而通电电位易受IR降、杂散电流、极化不均匀、交流干扰等因素的影响,存在误差。这种误差少则几十毫伏,多则上百毫伏,严重影响恒电位仪控制精度。关于控制误差的消除,可围绕减少溶液、土壤等电解质的电阻而展开,如近参比法可在一定程度上减小控制误差,但不能完全消除误差;亦可采用正反馈的方法补偿控制误差,但是反馈参数调整不当易造成系统震荡,影响系统稳定性[3-4],该方法多用于实验室的电化学工作站,尚未见到应用于工业现场的实例;较为常用的做法是定期实施保护电位评价工作,制定评估报告,在评估报告的基础上,由人工调整恒电位仪,评估过程耗费大量人力物力,并且人为调整恒电位仪存在较大的盲目性。
研究发现,采用试片断电法测得的断电电位较为接近金属的真实极化电位,能准确反映阴极保护的效果[3-5]。本文以断电电位为出发点,以电化学基本理论为依据,讨论恒电位仪的误差补偿方法,并将该方法应用于恒电位仪的控制系统。现场实验验证,该方法可靠有效,最大保护电位控制误差小于5 mV,平均断电电位控制误差小于1 mV,能够满足阴极保护工程的需要。
1 阴极保护基本原理
阴极保护体系可以用典型的三电极体系表示。图1表示阴极保护体系的基本原理[6],被保护金属构件Pipe相当于阴极、辅助电极CE相当于阳极、参比电极RE用于测量阴极极化电位。将阴极、阳极、参比电极以及零位接阴线缆连接至恒电位仪,利用参比电极测量的电位做系统的反馈信号,根据电位的变化调整阳极与阴极电流,这样便可实现被保护金属构件相对于参比电极的电位恒定。
电极过程等效电路[7]如图2。BC之间表示阴极与溶液的界面,A相当于参比电极,Rl表示溶液电阻,Cd表示电极/溶液界面的双电层电容,Z表示电化学反应的法拉第阻抗。恒电位仪的控制电位EAC可用公式EAC=EBC+EIR+E0表示,EIR为IR降,E0为杂散电流、极化不均匀、交流干扰等因素引起的控制误差[8],EBC是金属的真实保护电位,可用断电电位近似代替。其中,EIR和E0对系统的控制精度有较大影响,在实际的控制系统中要设计一种机制消除EIR和E0对控制系统的影响,补偿系统的控制误差,实现对EBC的控制。

图1 阴极保护体系基本原理
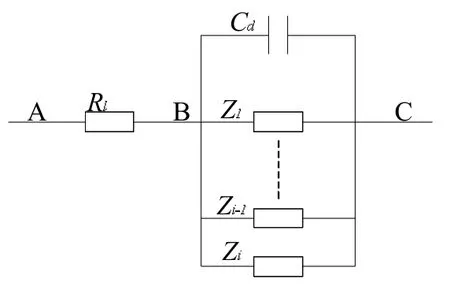
图2 电极过程等效电路
2 误差补偿原理
由腐蚀金属电极的动力学方程可以得到极化过电位与电流密度的关系[6-7]:

式中:i0为交换电流密度;iL为极限扩散电流密度;i为电流密度。
稳态情况下,逐步增加电流I,同时测量断电电位Eoff,可得到Eoff与电流I的关系曲线。理想情况下,该曲线应符合式(1),若式(1)中参数已知,这样便可利用式(1)进行预测。确定式(1)中的未知参数是问题的关键。可通过实验测量阴极保护体系的极化曲线,利用曲线拟合的方式求得未知参数,然而实际中这种方法并不适用。首先,体系参数会随着温度、湿度、pH值等外部环境因素而变化;其次,大多数阴极保护场合,极化过程较为缓慢,测量极化曲线将耗费大量时间,影响阴极保护的正常进行。式(1)求导数,可得到阻抗Rr与电流I的关系,若能求得对应电流处的Rr与溶液阻抗Rl,便可求得Eoff与I的关系,进而求得断电电位与通电电位的关系。
式(1)求微分可得:

施加小阶跃信号,电流密度有增量Δi,可得:

区间(i,i+Δi)内,可认为Rr≈Rr’,电流I与断电电位Eoff满足线性关系。
若期望控制的断电电位E’off与测量的断电电位Eoff存在误差,并且已知当前的控制电位Eon,希望求得与E’off对应的E’on。
断电电位Eoff与通电电位Eon有如下关系:

式中:Rl为溶液电阻,在一定条件下保持恒定,IRl为IR降EIR,与溶液电导率、电流以及参比电极的位置有关。
同时有:
对稳态系统计算E’off与E’on的关系:

式(7)即为误差补偿公式。
3 阴极保护电源设计
3.1 误差补偿阴极保护电源基本结构
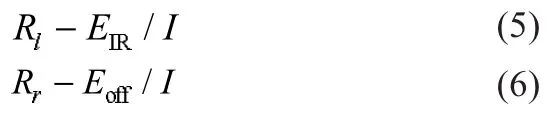
图3所示,其由50 Hz陷波电路、低通滤波电路[6]、A/D转换电路、数字滤波算法、误差补偿算法、D/A转换电路以及开关逆变电路组成。选用STM32系列ARM做主控制器,其作用是对A/D转换、数字滤波、误差补偿、D/A转换以及断电电位的测量进行控制,同时控制MOSFET的通断实现断电电位测量,在断电电位测量的基础之上,采用误差补偿公式实现恒断电电位[9]。
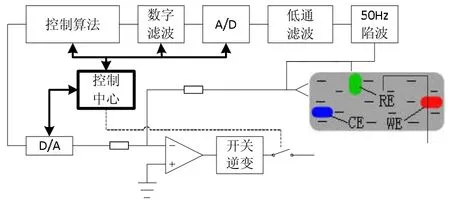
图3 误差补偿恒电位仪基本结构
3.2 抗干扰滤波器
作者2010年对国内某段石油管道做CIPS测试时发现,采集得到的保护电位叠加了峰峰值达±30 V的交流干扰信号,同时也有不少文献阐述了交流干扰信号对阴极保护系统的影响[3]。交流干扰不仅影响恒电位仪控制精度,还会降低控制系统的稳定性,过高的干扰电压甚至会造成运算放大器饱和,使仪器无法正常工作。
除了50 Hz干扰信号,信号中还分布有高频噪声。用示波器观察这些信号的时域特征,并没有发现特有的规律,示波器屏幕上布满了噪声信号,其幅值有±10 V之多。在频域分析,作者发现,除了50 Hz工频干扰具有很大的分量,其他信号则呈现出无规律的白噪声。
本文采用初级50 Hz陷波、次级低通滤波、末级数字滤波的三级滤波方式,消除工频干扰和高频噪声。在次级滤波输出与A/D转换电路之间还加入了隔离电路,以进一步提高抗干扰能力。
50 Hz陷波器选用了一种差分式的双T无源网络,实验验证其陷波深度约为-25 dB。关于低通滤波器,要设计合适的截止频率,截止频率过低,会造成滤波器时延过大,影响测量系统相应速度;截止频率过高影响滤波效果。设计时选择了截止频率100、500和1 000 Hz三种二阶滤波网络,分别测试其滤波效果。实验现场选择碧海舟腐蚀防护工业有限公司实验管道,测试结果发现,不使用低通滤波器时,采集卡得到的数据在±25 mV范围内波动,使用1 000 Hz截止频率滤波器后,数据波动范围缩减为±10 mV,使用100 Hz与500 Hz滤波器得到的数据基本相同,波动在±2 mV之内。综合考虑,截止频率选择500 Hz。
3.3 控制策略
误差补偿方法是基于稳态系统推导而出的,对于非稳态系统不成立,要准确测量断电电位,也要求系统处于稳态。因而误差补偿之前要判定系统是否达到稳态。误差补偿时机应选在系统进入稳态之后,过早的调整(系统未达到稳态就进行调整)会造成系统震荡,过晚的调整影响系统效率。然而,系统的稳态与暂态之间并没有明确的界限,系统进入稳态的具体时刻无法确定,并且不同的系统进入稳态的速度亦不相同,这对误差补偿周期的确定带来了麻烦。因此,环路中需加入稳态判定环节。
稳态判定可依据电流变化率,对于一个非稳态系统,当用恒电位仪(恒电位仪工作在恒电位模式)控制时,其电流会随着时间而变化,直至趋于稳定。随着系统由暂态过渡到稳态,电流变化率逐渐减小,直至趋于零[7]。设定一个阈值,电流变化率小于该阈值即可判定系统达到稳态。
若控制系统判定阴极保护体系已达稳定状态,断电电位测量程序启动。断电后,断电电位按指数规律衰减,因此断电电位的测量要即时。考虑测量系统滤波器的时延特性,选择断电后的50 ms开始测量,控制系统自动记录断电电位衰减曲线,并依据该曲线反推断电瞬间的电位值。
整个控制系统的结构如图4所示。控制网络由相互嵌套闭环控制环路组成,内部环路由滤波环节,通电电位测量环节、PID控制器和被控对象(阴保体系)组成,用于实现通电电位恒定。外部环路是本文设计的关键,其作用是实现预测。外部环路由电流测量、稳态判别、滤波、断电电位测量以及误差补偿等环节构成。
图4 控制系统结构框图
4 实验结果
4.1 实验装置
实验场地选址碧海舟腐蚀防护工业有限公司实验场,选取长50 m,直径40 cm的钢制管道。阳极采用柔性阳极。管道埋地深度1 m。参比电极采用长效饱和硫酸铜电极,埋在与管道同等深度,距管道20 cm的位置。管道埋地时,测得未施加阴极保护时管地电位-455 mV(相对饱和硫酸铜电极)。实验场地周围空旷,无大型工业设备、高压输电线路等强干扰源。用示波器观察管地电位,未发现严重的干扰信号。实验装置组成如图5。
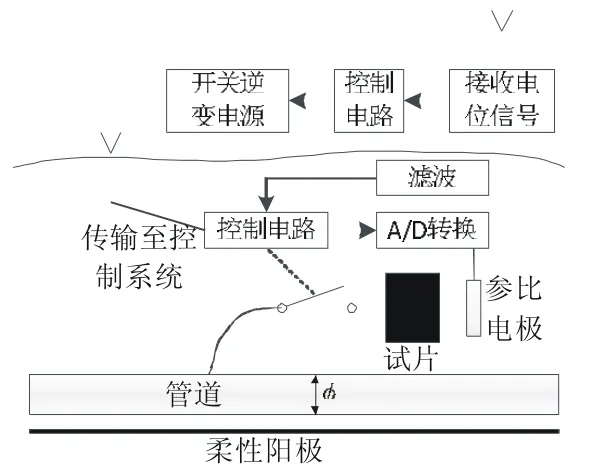
图5 阴极保护电源实验装置
4.2 误差补偿效果
设置期望保护电位为-800 mV,图6记录了仪器运行50 h的数据。开始工作的7 h内系统尚未稳定,实测断电电位较-800 mV有较大误差,但随着时间的延长误差逐渐减小,实测断电电位趋于-800 mV,并维持恒定。(b)和(c)分别为通电电位与控制电流,实验中通电电位与电流均呈先增加后减小的趋势。实验证明恒电位仪能有效补偿控制误差,维持断电电位恒定。

图6 误差补偿效果
4.3 抗干扰性能
人为叠加±30 V的交流干扰信号,重复上述实验,结果如图7。仪器开始工作的17 h内,由于断电电位与设置的期望电位有较大差值,仪器自动将通电电位调整至-1 500 mV,断电电位与期望电位的误差逐渐减小,直至趋于期望电位-800 mV。69 h时,断电电位有轻微波动,而且负于-800 mV,这说明控制电流过大,需要降低控制电流,误差补偿程序调整通电电位,以补偿断电电位的误差。误差补偿的结果是通电电位与电流均减小,断电电位恢复-800 mV。69 h之后,所需的保护电流与通电电位逐渐减小,而断电电位稳定在-800 mV左右。整个过程断电电位保持恒定,电位波动明显减小,电位误差始终控制在±5 mV之内。最大误差出现在第69 h,为-805 mV,随后控制误差在两小时内减小到2 mV。
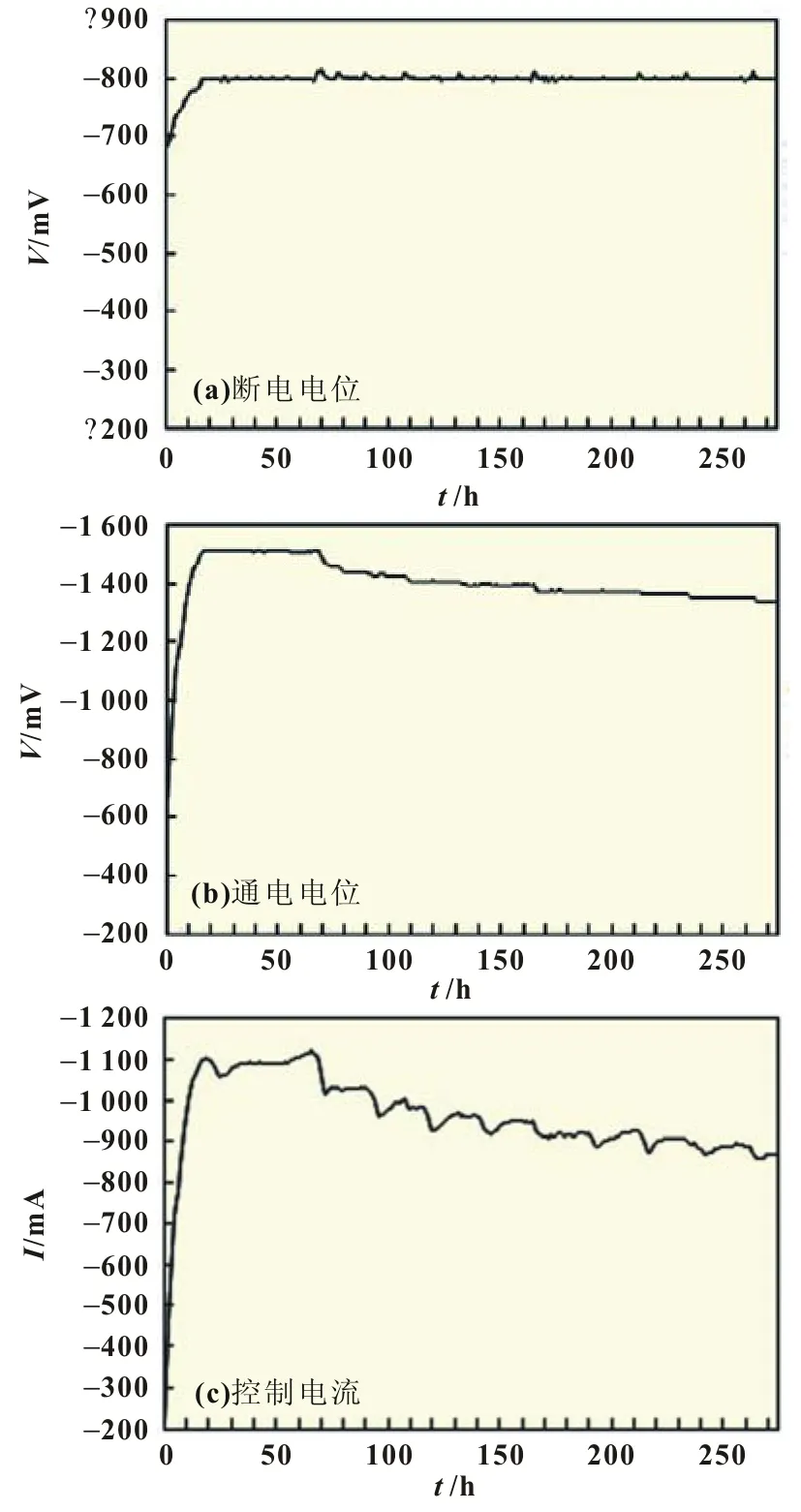
图7 恒电位仪抗干扰测试
除去抗干扰滤波器,重做上述实验,图8所示。图8中曲线的摆动幅度明显大于图7。比较前后两组实验数据:图7中断电电位的均值和方差分别为=-800.7,S2=8.11。图8中则有=-804.4,S2=111。综上可得,抗干扰滤波器能有效增强恒电位仪的抗干扰性能,提高控制精度。

图8 除去抗干扰滤波器后的断电电位曲线
4.4 恒通电电位下断电电位变化趋势
将仪器调整至普遍采用的恒通电电位模式,同时测量断电电位,比较两种控制模式下断电电位的变化趋势。图9所示,该模式下断电电位随着时间的延长逐渐升高,这说明普遍采用的恒通电电位控制方法不能维持断电电位恒定,其控制存在误差。
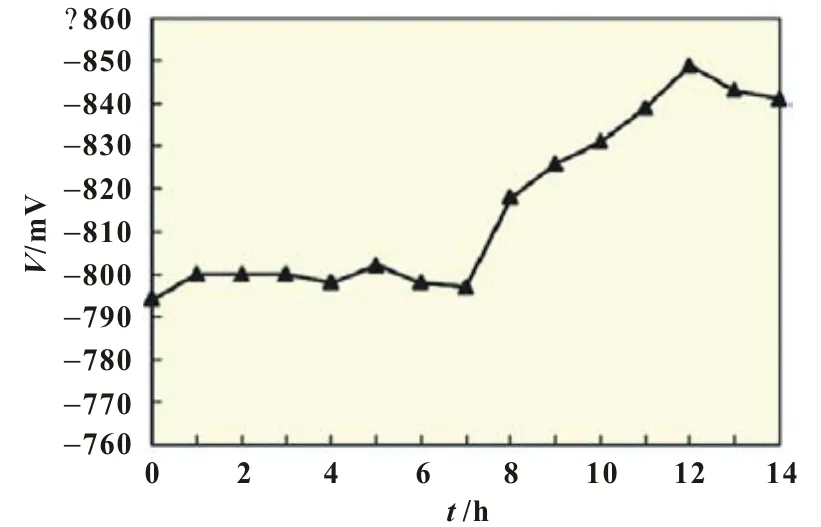
图9 恒通电电位控制下断电电位变化曲线
5 结论
由于IR降、杂散电流、极化不均匀等因素的影响,常规恒通电电位控制方式存在控制误差,本文从电化学体系过电位与电流密度的关系出发,结合控制理论,提出了一种适用于恒电位仪的误差补偿方法,实现了恒断电电位。初步实验数据表明,该控制方法效果明显,断电电位控制精度优于±5 mV,可提高恒电位仪的可靠性,具有较高的实用价值。
[1]TUBB R.2011 Worldwide pipeline construction report[J].Pipeline&Gas Journal,2011,238(1):26-34.
[2]PU M.Current status and prospects of oil and gas pipelines in China[J].China Oil&Gas,2010(1):42-47.
[3]胡士信.阴极保护工程手册[M].北京:化学工业出版社,2000.
[4]包宇,袁福宇,张玺.电化学测试中溶液电阻的自动测量与补偿[J].分析化学,2011,39(6):939-042.
[5]BI W,XUE Z.The underlying reasons for relatively positive of potential and large IR drop around current drainage point areas[C]//18th International Corrosion Congress.Perth,Australia:Australasian Corrosion Association,2011.
[6]胡会利,李宁.电化学测量[M].北京:国防工业出版社,2007.
[7]BAGOTSKY V S.Fundamentals of Electrochemistry[M].2nd ed.Hoboken New Jersey:John Wiley&Sons,Inc,2006.
[8]李永刚,李锦萍.地铁杂散电流检测的模拟实时监测系统[J].控制工程,2004,11(S1):150-152.
[9]孙凤娟,王佳.虚拟恒电位仪的研制及其在腐蚀电化学测量中的应用[J].物理化学学报,2012,28(3):615-622.
Automatic error compensation cathodic protection power source
LI Lin-ze1,2,ZENG Zhou-mo1,LI Jian1
(1.State Key Laboratory for Precision Testing Techniques and Instrument,Tianjin University,Tianjin 300072,China;2.China Satellite Maritime Tracking and Controlling Department,Jiangyin Jiangsu 214431,China)
A prediction based off-power potential control method was proposed to overcome the weakness of traditional potentiostat which is only able to control on-power potential.The power potential prediction method was proposed by analyzing the relation between protection potential and current density in electrochemical system.The corresponding control strategy was proposed for cathodic protection project.A better power potential protection method was proposed.The experiment results show the proposed method is effective and reliable and it can remarkably improve the control accuracy of protection potential.
cathodic protection;potentiostat;IR drop;off potential
TM 461
A
1002-087 X(2016)08-1699-04
2014-01-17
李林泽(1987—),男,河南省人,硕士,主要研究方向为精密仪器及石油管道防护。
