飞轮储能技术
2016-07-24陈亚爱甘时霖周京华陈焕玉
陈亚爱,甘时霖,周京华,陈焕玉
(北方工业大学北京市电力电子与电气传动工程研究中心,北京100144)
飞轮储能技术
陈亚爱,甘时霖,周京华,陈焕玉
(北方工业大学北京市电力电子与电气传动工程研究中心,北京100144)
飞轮储能技术因其储能密度大、储能效率高、对环境无危害等优点而备受关注。在分析飞轮储能工作原理的基础上,重点介绍了当今飞轮储能系统中储能释能分立结构和双向逆变结构的电路拓扑,以及目前飞轮储能技术在国内外的应用情况,为飞轮储能技术的研究与工程应用提供参考。
飞轮储能技术;电路拓扑;储能;释能
飞轮储能技术因其储能密度大、储能效率高、对环境无危害等优点而备受关注。大约在20世纪50年代飞轮储能技术就被提出,受到当时技术水平以及硬件设备的限制飞轮储能技术发展缓慢。直到20世纪80年代初期,高温超导磁悬浮技术、高强度碳素纤维化合物、现代电力电子技术得到了重大研究突破,带动了飞轮储能技术的深入研究。随着新能源发电技术的发展和智能电网的建设,储能技术成为全球研究的重要课题,飞轮储能技术也随之成为研究热点问题之一[1]。
1 飞轮储能系统的分类及工作原理
1.1 飞轮储能系统的分类
目前国内外研究的飞轮储能系统的种类很多,若按飞轮储能系统所用电机可分为:基于同步电机的飞轮储能系统[2-3]、磁阻电机的飞轮储能系统[4]和基于感应电机的飞轮储能系统[5];若按飞轮储能系统主电路拓扑分则有:储能释能分立结构飞轮储能系统[6]和双向逆变结构飞轮储能系统[7];若按系统调节器可分为:传统PID控制的飞轮储能系统[8]、模糊PID控制的飞轮储能系统[9-10]和神经网络控制的飞轮储能系统[11-12]。飞轮储能系统分类图如图1所示。本文以飞轮储能系统主电路拓扑分类进行综述。
1.2 飞轮储能系统组成及工作原理
飞轮储能系统是一种以动能方式存储能量的机械电池,它由高速飞轮、电动机/发电机、轴承、功率电子变换器、控制设备以及附加设备(如真空泵、紧急备用轴承)等组成,如图2所示。
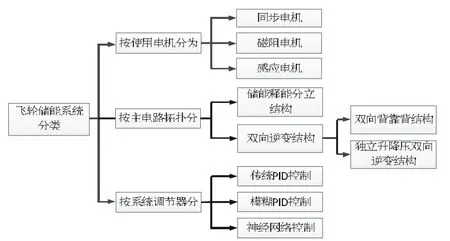
图1 飞轮储能系统分类图
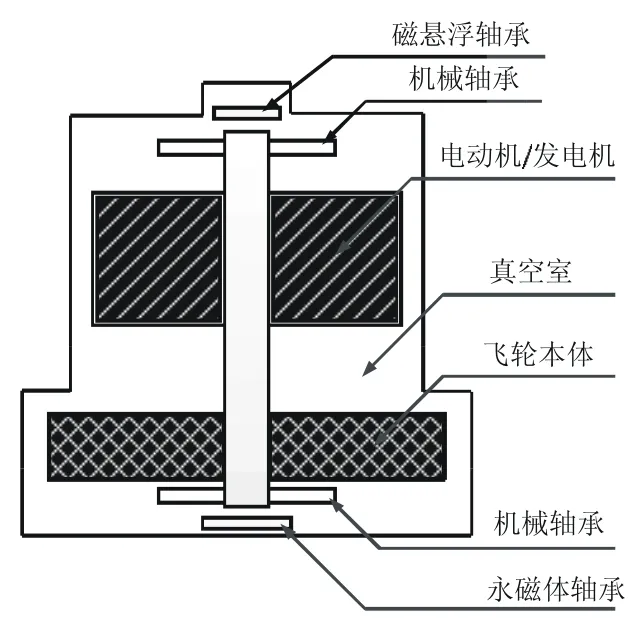
图2 飞轮储能装置结构示意图
飞轮系统在储能时,由工频电网提供的电能,经功率电子变换器,驱动电机并带动飞轮高速旋转,以动能的形式将能量储存于飞轮中,从而完成电能-机械能转换的储存能量过程。当需要向负载供电或者并入电网时,高速旋转的飞轮作为发电机发电,经功率变换器输出用于负载的电流与电压,完成机械能-电能转换释放能量过程。整个飞轮储能系统实现了电能的输入、储存和输出的全过程[14]。图3所示为飞轮储能系统工作原理示意图。
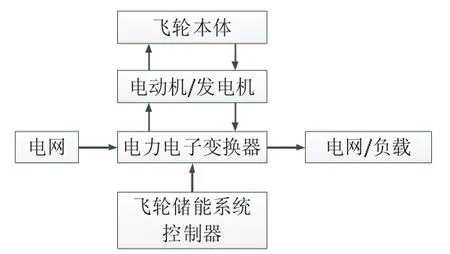
图3 飞轮储能系统工作原理示意图
2 飞轮储能系统储能技术
飞轮储能系统中,控制器的作用是在储能时采用不同的控制方法,控制主电路半导体元件的开通和关断,完成脉宽调制,使逆变器输出电压符合需要的频率大小和波形,满足飞轮加速或减速的需要[7]。图4所示为飞轮储能驱动系统示意图。系统处于充电状态时,PWM变流器1起整流作用,将工频交流电整流为直流电;PWM变流器2起逆变作用,将直流电源经脉宽调制变为频率电压可调的交流电,驱动电机带动飞轮高速旋转,电机工作在电动状态,将电能转化为动能储存于飞轮中。
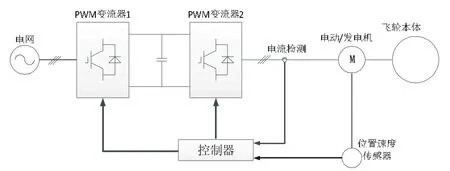
图4 飞轮储能驱动系统示意图
由前所述,飞轮储能系统主电路拓扑结构主要有:(1)储能与释能回路分立结构;(2)储能与释能回路一体的双向逆变结构[3],其中一体结构又可以分为双向背靠背结构和独立升降压双向逆变结构。分立结构的优点是控制方法相对简单,缺点是功率器件多但利用率低和拓扑电路相对复杂;较之分立结构,双向逆变结构其具有功率器件少、集成度高以及拓扑简单等优点,缺点是相对分立的结构而言,其控制算法较为复杂。
2.1 基于储能释能回路分立结构的储能技术
飞轮储能系统要求驱动飞轮的电机能够运行在电动、能量保持和发电三种状态。储能释能回路分立结构的飞轮储能系统主电路拓扑如图5所示,控制系统主要由AC/DC整流电路、DC/AC逆变电路、机电双向能量变换器、工作方式控制开关以及飞轮单元等组成[13]。
当系统工作在储能状态时,机电双向能量变换器工作在逆变状态,飞轮电机作为电动机运行。电能经三相不控整流电路将交流电变换为直流电为逆变侧提供稳定的直流源[14]。通过控制器控制逆变器输出频率,使电机升速达到给定转速,带动飞轮旋转完成电能的储存。系统工作在释能状态时,电机作为发电机运行,应用PWM整流技术对输出的交流电进行整流,使直流母线电压维持稳定,此时输出的直流电经网侧逆变器后回馈电网或供给交流负载[15-16]。
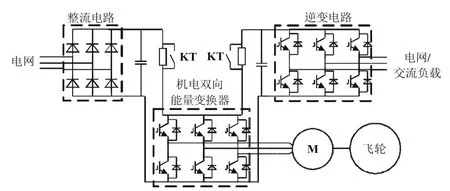
图5 飞轮储能系统储能释能回路分立结构主电路拓扑
文献[6]介绍了利用电机电感的储能升压实现飞轮能量回馈的发电控制方案,即根据永磁无刷直流电机的转子位置信号,导通相应的开关管,使电机电流与电动势反相,回馈能量。
2.2 基于双向逆变结构的储能技术
由于PWM控制的三相桥结构变流器可工作于整流和逆变两种状态,能够实现能量的双向传输,且硬件结构简单,因此在飞轮储能系统领域得到广泛的应用[17]。
2.2.1 采用双向DC-DC电路结构变换器的储能技术
采用双向DC-DC变换器的飞轮储能系统主电路拓扑如图6所示,主电路由双向DC/DC变换器、逆变电路等部分组成[18]。
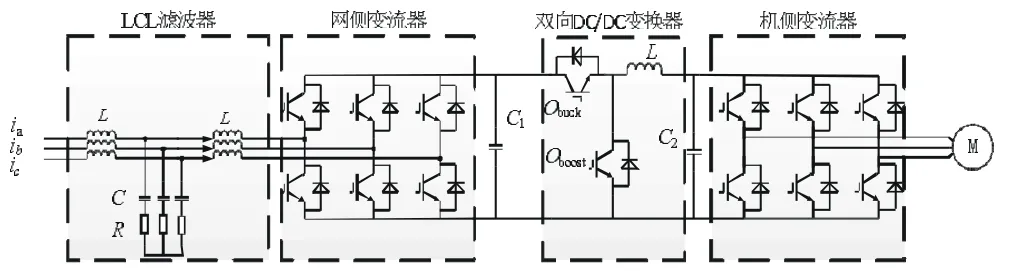
图6 采用双向DC-DC变换器的飞轮储能系统主电路拓扑
如图6所示,在三相桥变换器的基础上增加了两个功率器件,用于独立的升压、降压控制。在储能工作模式下,充电时Qboost关断,采用Qbuck、Dbuck、L、C2组成的Buck降压电路控制直流母线电流恒定,从而实现飞轮电机的控制;三相桥用于飞轮电机的换相。电机为电动机工作模式,能量由网侧向电机侧正向流动。驱动系统是一个电流速度的双闭环系统,控制框图如图7所示,外环是转速环,内环是电流环。文献[19]介绍了运用此控制方法实现对飞轮系统的储能控制,使电机驱动飞轮转动完成储能。
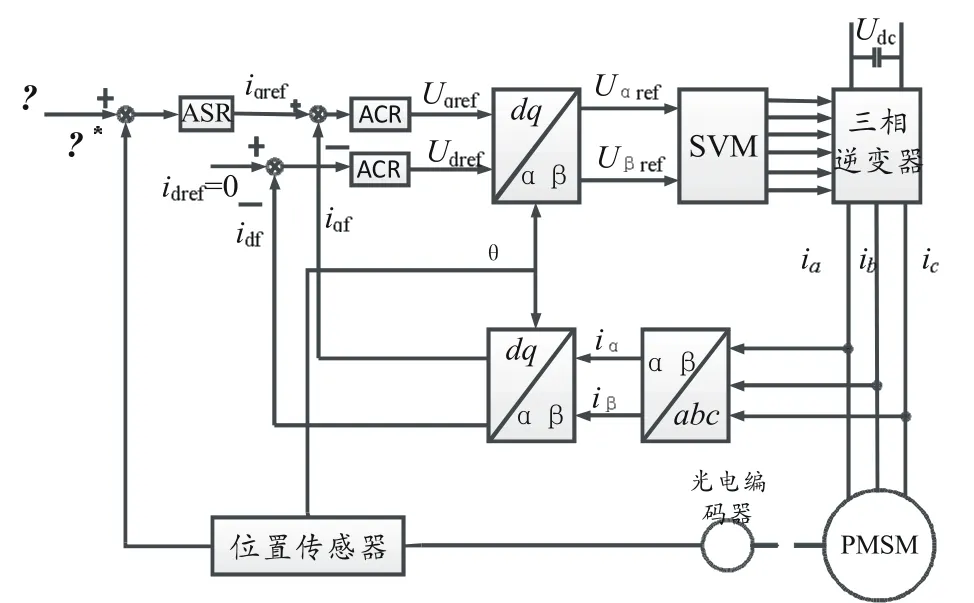
图7 双闭环系统控制框图
当系统切换到释能状态时,Qbuck关断,采用Qboost、Dboost、L、C1组成的Boost升压电路控制负载两端电压恒定;三相桥六个开关管全部关断,仅续流二极管用于不控整流。电机处于发电机工作状态,在放电过程中系统的机械能转换成电能,电机的转速下降致使电机端电压逐渐下降,因此需要在负载前加上Boost升压电路。系统工作在释能状态下,电能通过续流二极管组成不空整流电路将交流转为直流,再经Boost升压斩波电流为网侧逆变器或者直流负载提供稳定的直流电源。
文献[20-21]介绍了如图6所示拓扑下的释能控制策略并且采用了新型的Boost升压电路,对DC/DC变换器采用双闭环控制直流侧的电压和电流,控制框图如图8所示。在控制器中给定参考电压,通过电压调节器控制输出侧的直流电压,电压调节器的输出作为电流调节器的参考值;该双闭环结构不仅能够同时控制输出侧的电压电流值防止系统过压过流,并且还能够有效减小扰动以及由于转速下降太快、电流过大、过度释能的影响。
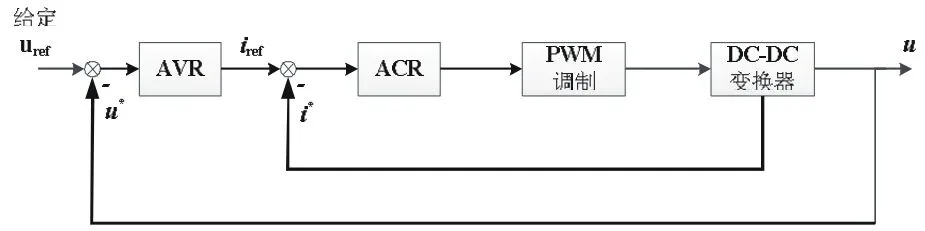
图8 DC/DC变换器采用双向闭环控制框图
2.2.2 采用双向背靠背变流结构的储能技术
在文献[3]、[7]和[22]介绍的飞轮储能系统中电力变换器主要完成飞轮的储能和释能时的回馈,如图9所示双向背靠背储能和释能一体的结构拓扑,网侧变流器在飞轮储能系统工作在储能工况时为PWM整流器,在释能工况下为逆变器;电机侧变流器在储能工况下为逆变器,在释能工况下为PWM整流器。该拓扑结构简单、功率器件少、集成度高[23]。
如图9所示飞轮储能系统主电路采用背靠背双向PWM变流器拓扑结构,其电网侧PWM变流器通过LCL滤波器与电网连接,Lg,Lr分别为LCL滤波器的电网侧电感和变流器侧电感,Cf为交流滤波电容。电机侧PWM变流器为永磁同步电机的定子电枢绕组供电。直流母线上电容的作用是抑制母线电压的纹波,图9中Udc为直流母线电压。在2个变流器间设置泄放回路的主要目的是防止电机处于发电状态时,逆变器出现故障导致母线电压泵升,造成直流支撑电容损坏。
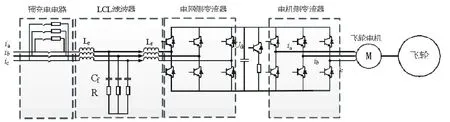
图9 双向背靠背结构逆变器的飞轮系统
飞轮储能系统的整体控制策略的目标是:(1)保持网侧和电机侧的能量平衡;(2)按需求控制系统的能量传输[3]。储能工况下电网侧变流器采用的是电网电压定向控制算法来控制母线电压稳定,电机侧驱动器采用的是磁场定向控制算法来控制电机转速。整体控制框图如图10所示。飞轮储能系统需要根据上层控制策略计算得到的电流指令值,在其工作范围内满足该电流指令要求,因此电机侧变流器采用转速外环与电流内环双闭环控制。为了防止直流母线电压泵升或者下降,网侧变流器采用电压电流的双闭环控制,保证母线电压稳定。
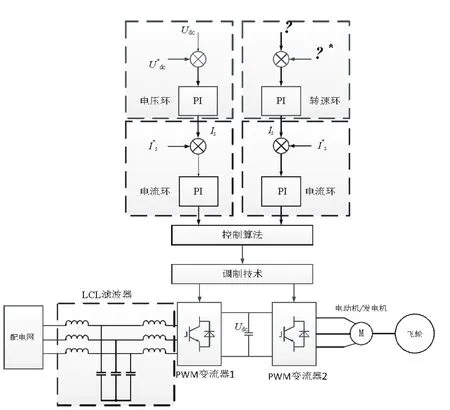
图10 整体控制框图
飞轮储能系统释能时,为保证负载正常工作需要机侧变流器来稳定直流母线电压,控制系统外环为直流电压环,内环为电流环,根据电容电压的变化控制永磁同步电机经变流器输出到直流侧的功率。网侧变流器工作在逆变并网模式下使飞轮储存能量回馈电网或者负载侧供电[24]。
3 飞轮储能技术的应用
飞轮储能技术在许多领域已经投入使用,特别是在美国、日本、德国等发达国家发展得已比较成熟。其主要应用在电力调峰、不间断电源、飞轮电池、航空航天等领域。
3.1 电力调峰
飞轮储能系统的运行没有地理限制,不污染或破坏环境,可在任意时间间隔、以任意规模方便地进行能量存储与释放,可就近分散放置,适应环境保护的要求,因而被认为是近期最有希望和最有竞争力的新型调峰技术。另外,由于它的充放功率可以很大,并联或串联在电网中也能起到改变系统阻尼、增加电网稳定性的作用。德国于1996年建造的100 MWh的超导磁悬浮飞轮储能电站,飞轮储能系统效率可达96%。考虑到飞轮的储能密度高、充放电快捷、充放电次数不限等优点,国外许多研究机构已将飞轮储能引入风力发电系统。美国的BCON公司制造的20 MW的飞轮储能系统已在纽约配合当地风电网投入使用[25]。
3.2 不间断电源(UPS)
UPS是一种利用市电或蓄电池能源向负载提供高质量交流电源的设备。飞轮储能装置正在逐步取代UPS中的化学蓄电池,特别是用在通信行业的UPS中,由于很多工作在户外,工作环境差,一般的化学蓄电池不能适应,而飞轮储能装置对环境无要求,工作适应能力较强[26]。美国Active Power公司主要生产用于不间断电源的飞轮储能装置,该公司生产的飞轮储能系统工作转速在7 000~7 700 r/min,工作维持时间为几十秒到几分钟[27]。
3.3 飞轮电池
将飞轮安装在化学电池或内燃机供能的机车上起缓冲器作用与系统协同工作,称这种装置为飞轮电池。汽车制动过程中,将制动能耗通过电动机转化为飞轮的机械动能储存起来,成为再生能源。当汽车需大功率工作时,飞轮再通过发动机将动能释放以供系统使用。该技术也可用在火车和军用电池坦克上。研究表明合理设计混合飞轮电池可节约能耗30%,并能减少废气排放量75%。美国的威斯康星大学、劳伦斯国家实验室、麻省理工学院、德国的磁电机公司和加拿大的McMaster大学目前都在此方面有所研究,并取得了一定的成果[27]。
3.4 航空航天
现代航天器大多采用太阳电池阵和蓄电池联合供电系统。蓄电池组的主要用途是在航天器进入地球阴影区时,在太阳电池阵不能供电给负载时供电,或在负载需求功率超过太阳电池阵功率时供电。这种蓄电池系统存在比能小、可靠性低、充放电深度难以准确估量及使用寿命等问题制约了现代航天器的发展。采用飞轮储能系统不但能克服这些缺点完成能量供给,还可实现姿态控制,使航天器的质量得到较大幅度的减轻,降低系统成本的同时增强系统的可靠性。因此姿态控制和储能两用飞轮系统的研究已成为当前国内外卫星飞轮系统的研究热点[28]。美国Satcon技术公司、NASA研究中心和马里兰大学都在开发卫星姿态控制用飞轮储能系统,其中NASA还进行了太空运行实验。
4 结语与展望
飞轮储能具有大储能容量、高效率、无污染、适用广、无噪声、长寿命、维护简单及可实现连续工作等优点,已成为国际能源界研究的热点之一[29]。我国应当积极从国家层面支持国内飞轮储能电源技术研究开发,早日推出国产飞轮储能电源高技术产品[30]。飞轮储能系统不仅可以解决偏远地区的供电问题,同时又能提高电能的利用效率,为电力行业的稳定发展提供了重要保障。随着飞轮储能系统多单元并联技术逐渐成熟,飞轮作为一项新的储能装置在未来几年中必将获得更广泛的应用。
[1]PARK J C,CHOE G H,KIM Y S,et al.Analysis and Design of PWM Inverter System for Flywheel Energy Storage System[C].Daegu:The 7th International Conference on Power Electronics,2007:169-173.
[2]张秋爽.飞轮储能系统控制策略研究[D].北京:北京交通大学,2012.
[3]王江波,赵国亮,蒋晓春,等.高速飞轮储能系统的研究与实现[J].电气传动,2014,44(1):26-30.
[4]宋良全,孙佩石,苏建徽.飞轮储能系统用开关磁阻电机控制策略研究[J].电力电子技术,2013,47(9):55-57.
[5]ACARNLEY P P,MECROW B C,BURDESS J S,et al.An integrated flywheel machine energy store for road vehicles[J].IEEE Colloquium on New Topologies for Permanent Magnet Machines,1996,32(6):1402-1407.
[6]李雪松.飞轮储能系统电动发电运行控制技术的研究[D].北京:华北电力大学,2006.
[7]梁荣.飞轮储能电力变换器的研究[D].哈尔滨:哈尔滨工业大学,2012.
[8]张邦力,胡汉春,何青,等.飞轮储能装置储能状态控制研究[J].机电产品开发与创新,2010,23(6):100-102.
[9]FU X X,XIE X P.The control strategy of flywheel battery for electric[C]//Proceedings of IEEE International Conference on Control and Automation.Guangzhou:IEEE,2007:493-496.
[10]付雄新,谢小鹏.电动汽车用飞轮电池充放电控制系统研究[J].微计算机信息,2007,23(6):263-265.
[11]蒋宇,李志雄,汤双清.BP神经网络在飞轮电池控制系统中的研究[J].微特电机,2009(6):29-32.
[12]汤双清,李志雄,蒋宇.改进算法单神经元PID在飞轮储能系统中的研究[J].机械设计与制造,2009,5(5):127-129.
[13]刘丽影,李雪松,张建成.飞轮储能系统发电运行控制技术的研究[J].华北电力技术,2007(9):8-10.
[14]杨锋,于飞,张晓锋,等.飞轮储能系统建模与仿真研究[J].舰船技术,2011,4(4):3-7.
[15]黄宇淇,姜新建,邱阿瑞.飞轮储能能量回馈控制方法[J].清华大学学报,2008,48(7):1085-1088.
[16]陈峻岭,姜新建,朱东起,等.基于飞轮储能技术的新型UPS的研究[J].清华大学学报,2004,44(10):1322-1324.
[17]黄宇淇,姜新建,邱阿瑞.飞轮并联运行于放电模式时的控制策略[J].微电机,2008,41(5):20-23.
[18]王楠,李永丽,张玮亚.飞轮储能系统放电模式下的非线性控制算法[J].中国电机工程学报,2013,33(19):1-7.
[19]王爽,李铁才,林琦,等.飞轮储能系统双向逆变器研究[J].微电机,2010,43(9):52-56.
[20]李保军.飞轮储能系统电机设计与充放电控制仿真研究[D].上海:上海交通大学,2011.
[21]谈震.飞轮储能驱动控制系统的研究与开发[D].天津:天津大学,2011.
[22]王爽,李铁才,王治国,等.零动量储能飞轮系统研究[J].微电机,2010,43(8):6-11.
[23]RODRIGUEZ J R,DIXON J W,ESPINOZA J R,et al.PWM regenerative rectifiers:State of the art[J].IEEE Transactions on Industrial Electronics,2005,52(1):5-22.
[24]郭伟,王跃,李宁.永磁同步电机飞轮储能系统充放电控制[J].西安交通大学学报,2014,48(10):2-6.
[25]葛举生,王培红.新型飞轮储能技术及其应用展望[J].电力与能源,2012,33(2):181-184.
[26]王巍,高原,姜晓弋.飞轮储能技术发展与应用[J].船电技术,2013,33(1):31-34.
[27]WERFEL F N,DELOR U F,RIEDEL T,et al.Towards high-capacity HTS flywheel systems[J].IEEE Transactions on Applied Superconductivity,2010,20(4):2272-2275.
[28]王力.飞轮储能控制系统的研究[D].哈尔滨:哈尔滨理工大学,2008.
[29]张维煜,朱秋.飞轮储能关键技术及其发展现状[J].电工技术学报,2011,26(7):142-146.
[30]戴兴建,邓占峰,刘刚,等.大容量先进飞轮储能电源技术发展状况[J].电工技术学报,2011,26(7):133-140.
Energy storage technology of flywheel
CHEN Ya-ai,GAN Shi-lin,ZHOU Jing-hua,CHEN Huan-yu
(Power Electronics&Motor Drivers Engineering Research Center,North China University of Technology,Beijing 100144,China)
The energy storage technology of flywheel has attracted more attention because of its high energy storage density,high storage efficiency and no harm to the environment.On the basis of operation principle of flywheel energy storage,the flywheel energy storage system and energy release discrete structure and bidirectional inverter circuit structure were emphatically introduced.The domestic and international application of flywheel energy storage system based on the advantages of this technology was presented.
energy storage technology of flywheel;circuit;storing energy;releasing energy
TM 31
A
1002-087 X(2016)08-1718-04
2016-01-08
陈亚爱(1961—),女,上海市人,教授,主要研究方向为电力电子与电气传动。
