PVDF薄膜型滑觉传感器设计和性能测试研究
2016-07-20许玉云许德章
许玉云,许德章,2∗
(1.安徽工程大学机械与汽车工程学院,安徽芜湖 241000; 2.芜湖安普机器人产业技术研究院有限公司,安徽芜湖 241007)
PVDF薄膜型滑觉传感器设计和性能测试研究
许玉云1,许德章1,2∗
(1.安徽工程大学机械与汽车工程学院,安徽芜湖 241000; 2.芜湖安普机器人产业技术研究院有限公司,安徽芜湖 241007)
摘要:选用PVDF(压电薄膜)柔性材料作为传感器敏感元件,基于PVDF压电原理构建了敏感单元阵列,并从敏感单元阵列输出信号中解算出接触面法向和接触面内两个切向力信号.根据不同滑移状态摩擦系数μ的变化特征,借助接触面法向和接触面内两个切向力信号计算摩擦系数μ,进而判定手指与目标间滑移状态.为了充分验证方案的可行性,制作了滑觉传感器样品及实验装置,实验结果表明,传感器可靠地检测出手指与目标间的滑觉状态.
关 键 词:PVDF;滑觉信号;摩擦系数
在精密作业过程中,智能机器人的末端操作器或者灵巧手触觉感知非常重要[1-2].触觉包括滑移、冷热、振动、质感、目标形态等主要感知形式,反映了机械手指与目标间的接触状态以及目标物本身的信息特征[3-4].滑觉是触觉感知的重要组成部分,滑觉信号对于机械手指稳定抓取目标是必不可少的[5].滑觉信号检测目前有3种途径,一是检测手指与目标接触点位置的变化,例如Takahashi T[6]等利用阵列式触觉传感器检测手指与目标接触点位置变化,判别手指与目标间滑移状态,该方案的主要不足在于只有出现滑移时才能产生接触点位置变化,不能预测滑移趋势;二是基于手指与目标间出现滑移时伴随振动特征识别滑移状态,但滑动时所产生的振动很难与其他振动信号区分,需要复杂的数据处理获得滑动状态检测的阈值[7];三是检测手指所受三维力的大小,进一步得到摩擦系数的变化状态,基于MEMS工艺Van Anh Ho[8]等研制了三维力传感器,检测指尖受到的三维作用力,通过摩擦系数的变化判别滑移状态,其主要不足在于MEMS工艺复杂、测量范围小、精度低;也有学者选用光纤制作三维指力传感器,同样采用摩擦系数的变化判别滑移状态,但传感器尺寸较大、光路复杂、需要高性能处理器[9].PVDF薄膜具有质轻、柔软、机械韧性好、易剪裁等机械特性,拥有宽频带、高介电强度、灵敏度极好等优点,可以剪裁成任意形状直接敷贴在手指表面,不影响手指机械运动.因此,选用PVDF压电薄膜制作敏感单元,基于摩擦系数变化判别滑移状态,但需要解决两个关键问题,一是从PVDF表面电荷信号中解算Fn、FTX和FTY三维力分量;二是克服PVDF只能检测载荷变化量,不能精确检测静态力的缺陷.
1 滑觉特征提取
1.1 滑觉特征描述
滑觉用于描述机械手指与操纵目标间的接触状态.手指与目标间接触存在相对滑动和相对静止两种状态,可以从运动学和力学量两角度分别描述.
(1)滑觉运动学特征.当v手指=v目标,目标与手指相对静止,无滑动;当v手指≠v目标,目标与手指相对运动,存在滑动.手指或操作目标接触点的运动速度是手指或操作目标平动和转动的合成,不仅需要分别测量目标或手指的平动和转动量,而且需要确定目标和手指的瞬心位置以及接触点位置;加之瞬心位置和接触点的位置是时间的函数,因此,通过直接检测手指与目标接触区域的相对运动速度抽取滑觉特征,在目前技术条件下存在很大困难.
(2)滑觉力学特征.从手指与操纵目标间相互作用力状态角度看,当μ=C,目标与手指相对运动(存在滑动);当μ≠C,目标与手指相对静止,无滑动.因μ无法直接检测,需要借助式(1)解算,间接获得μ的值.由目标与操作机械手之间的力学关系得:

式中,C表示常数;μ为手指与目标间接触区域的摩擦系数;Fn为手指与目标接触法线方向上所受到的正压力;FT为手指与目标接触的切平面内所受到的切向力.
1.2 滑觉信号获取原理
鉴于前文对滑觉特征的讨论,基于检测摩擦系数μ的变化情况,判定目标与操作机械手之间的滑移状态.由式(1)可知,求解μ需要由传感器检测出Fn和FT,其中,FT由FTX和FTY两个分量组成.压电薄膜具有突出的压电效应,在压力作用下的变形将改变其表面电荷密度,利用电荷放大电路,可以精确检测其表面电荷变化量Q.通过指力传感器结构创新设计以及压电薄膜敏感单元阵列合理布局,由电荷量Q间接推导出Fn、FTX和FTY3个分量.当PVDF受到力的作用时,将引起表面电荷量的变化,类似于电容器充放电过程,因此,PVDF敏感元件只能测量动载荷,难以精确检测静载荷.另一方面,手指与目标物体之间的接触力一直处于变化之中,本质上属于动载荷.当手指与目标间无相对位置变化(不滑动)时,接触力的变化会导致敏感单元表面电荷的变化,摩擦系数μ也处于变化中;当手指与目标间处于滑动状态时,接触力的变化同样会导致敏感单元表面电荷的变化,但摩擦系数值基本不变,即摩擦系数μ不随接触力的变化而变化.因此,利用摩擦系数μ的上述特征可以准确地判别手指与目标间的滑移状态.
2 指力传感器设计和工作原理分析

图1 手指实物模型以及敏感单元的分布示意图
手指实物模型以及敏感单元的分布示意图如图1所示.为了增强手指抓取目标的稳定性,增大手指与目标间的接触面,选用硅胶材料制作手指.由图1可知,手指实物模型呈现软手指特征.手指模型的前部(手指与目标接触区)按1/4椭球曲面制作,后部(手指躯干)按椭圆柱曲面制作.因此,当手指与目标接触时,接触区域近似椭圆曲面.为了便于描述手指与目标间接触状态,建立图1所示的坐标系,手指与目标间接触区域的曲面形状可以表示为:

为了从PVDF表面电荷信号中,解算Fn、FTX和FTY3个分量,在手指前部按图1所示的方位敷设3条PVDF压电薄膜敏感单元,布置成等边三角形图案.其中,阴影部分为手指与目标的接触区域,1、2和3为PVDF压电薄膜敏感单元.PVDF压电效应满足以下关系式:

式中,Q为PVDF表面电荷;d3i为压电系数,第一个下标3表示产生电荷的表面垂直于厚度方向,第二个下标i为应力方向或应变轴;Fi为相关方向上所加的应力,F1代表长度(拉伸)方向所受的切向力(即FTX),F2代表宽度(横向)方向所受的切向力(即FTY),F3代表厚度(极化)方向所受的力(即Fn);A为导电极有效面积.
当软手指与目标接触时,手指接触平面上的3条PVDF敏感单元将受接触力作用.当目标与手指间存在滑动或滑动趋势时,3条PVDF敏感单元将受接触切平面两相互垂直的切向力FTX、FTY和沿接触面法线方向的法向力Fn共同作用.参照图1建立坐标系,敏感单元1、2和3输出的电荷量与受力分别满足式:


式中,Qi(i=1,2,3)表示PVDF敏感单元i所产生的电荷量;Fn表示目标与手指接触面沿法线方向的法向力;FTX和FTY表示手指与目标接触切平面内两相互垂直的切向力.
式(4)、式(5)和式(6)中压电系数d3i和导电极有效面积A为已知数,由此可知,能够从3条PVDF敏感单元表面电荷量Qi,推导出手指与目标接触时所受到切向力FTX,FTY和法向力Fn的大小.依据式(7)可以计算摩擦系数μ,并根据变化μ的情况判定手指与目标间滑移状态.

3 性能测试
3.1 试验平台的搭建
为了测试指力传感器性能,验证其功能,设计制作了一个实验测试装置,如图2、图3所示.由图2、图3可知,实验装置由上支架1、中支架2、下支架3、立柱4、底座5、滑轮6、砝码7、夹具8、平台9、指力传感器10组成.上支架1、中支架2和下支架3高度可以调整,可绕立柱旋转,3个支架上的水平支撑杆可以伸缩调整;指力传感器10通过夹具8固定,安放到平台9上;平台9的角度可调节,用于改变指力传感器10受力位置;在滑轮6两侧分别吊装砝码7和夹具8,在夹具8重量不变的情形下,通过调整砝码7的重量,改变指力传感器10的测定载荷;移动下支架3水平支撑杆的位置,控制指力传感器10与平台9间相对运动,模拟指力与操作目标间相对滑移状态.
PVDF敏感单元实物图如图4所示.由图4可知,敏感单元感应的电荷信号通过虚拟仪器NI PXI-4204的AI0、AI1、AI2端口接入.利用Labview软件工具,对敏感单元感应输出的电荷信号进行放大、低通滤波和工频陷波处理以及A/D处理后,转换成数字信号.其中,低通滤波的截止频率设定为100 Hz.依据式(4)、式(5)、式(6)和式(7),利用Matlab处理上述数字信号,绘制FT、FTX和FTY变化曲线以及对应的摩擦系数μ变化曲线.

图2 实验装置实物图

图3 实验装置三维设计图
图4 PVDF敏感单元实物图
3.2 实验过程
为了验证指力传感器检测手指与目标间滑移状态的可行性,拟定如下实验方案.
(1)指力传感器与平台间相对静止.指力传感器与平台接触,相对位置保持不变,改变砝码重量,测定一组实验数据.在相对静止时,FTX、FTY、Fn以及摩擦系数μ随时间变化的曲线分别如图5~图8所示.由图8可知,显示摩擦系数μ处于变化状态,表明手指与目标间处于相对静止状态(无滑动).
(2)指力传感器与平台间存在相对滑动.移动下支架水平支撑杆,使指力传感器与平台从相对静止转化为相对滑动状态,测定一组实验数据.FTX、FTY和Fn随时间变化的曲线分别如图9~图11所示.摩擦系数μ随时间变化的曲线如图12所示.由图12可知,摩擦系数μ在0~0.25 s内处于波动状态,表明手指与目标间不存在滑动,μ为静摩擦系数;在0.25~1 s间μ波动幅度很小,反映μ为动摩擦系数保持不变,表明手指与目标之间存在滑动;三维力在0.6~0.7 s间产生较大波动,但是摩擦系数μ基本保持不变,表明手指与目标间产生相对滑移时,摩擦系数μ不随接触力的变化而改变.

图5 在相对静止时,FTX随时间变化的曲线

图6 在相对静止时,FTY随时间变化的曲线
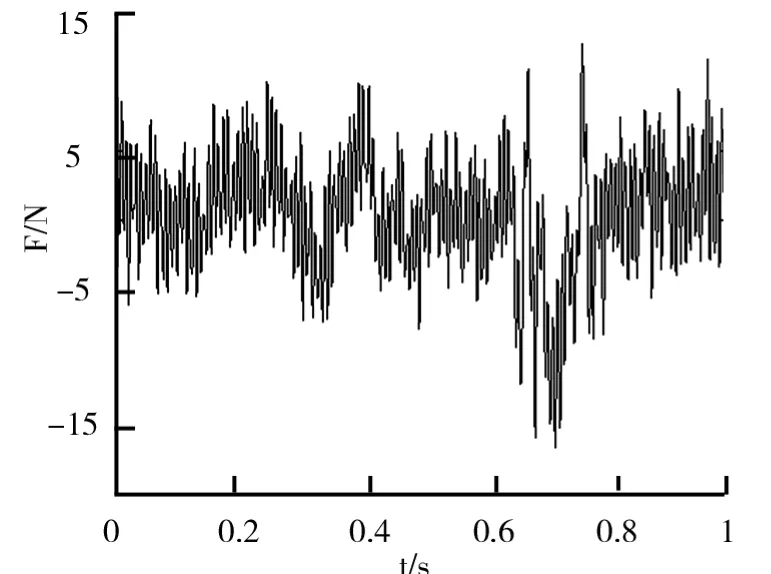
图7 在相对静止时,Fn随时间变化的曲线
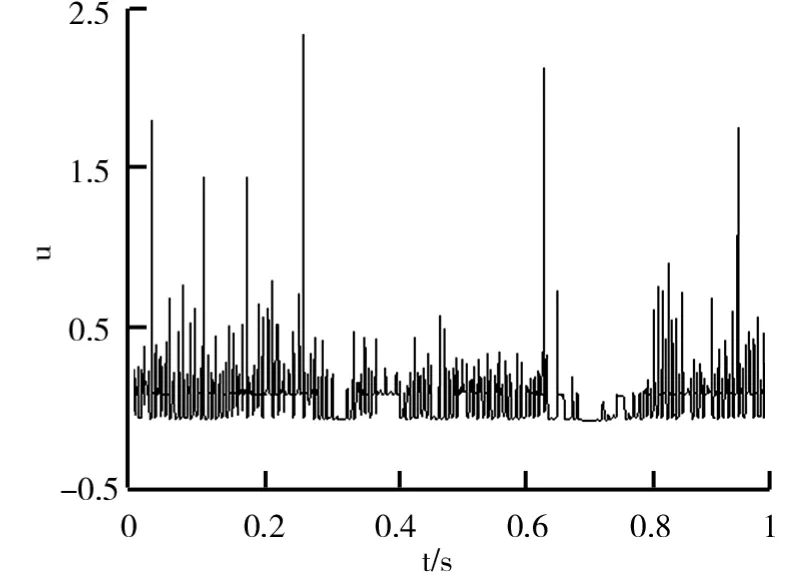
图8 在相对静止时,μ随时间变化的曲线

图9 在相对滑动时,FTX随时间变化的曲线

图10 在相对滑动时,FTY随时间变化的曲线

图11 在相对滑动时,Fn随时间变化的曲线

图12 在相对滑动时,μ随时间变化的曲线
4 结论
利用PVDF独特的压电效应和质地轻柔、易于剪裁、力电转换灵敏度高等特点,在手指上布置阵列式分布的压电薄膜敏感单元.从敏感单元表面电荷信号中间接推导出FTX、FTY和Fn,进一步计算出摩擦系数μ,并根据摩擦系数μ的变化状态判定手指与目标间的滑移状态.根据手指与目标间出现相对滑移时摩擦系数μ不随接触力变化而改变的特征,克服了PVDF敏感元件只能测量动载荷,难以精确检测静载荷的不足.实验结果表明,自制的指力传感器能够可靠地实现滑觉检测功能.
参考文献:
[1] Hanna Yousef,Mehdi Boukallel,Kaspar Althoefer.Tactile sensing for dexterous in-hand manipulation in robotics-A review[J].Sensors and Actuators A,2011,167(2):171-187.
[2] Masahiro Kondo,Jun Ueda,Tsukasa Ogasawara.Recognition of in-hand manipulation using contact state transition for multifingered robot hand control[J].Robotics and Autonomous Systems,2008,56(1):66-81.
[3] A Ramalho,P Szekeres,E Fernandes.Friction and tactile perception of textile fabrics[J].Tribology International,2013, 63:29-33.
[4] Diego R Faria,Ricardo Martins,Jorge Lobo.Jorge Dias Extracting data from human manipulation of objects towards improving autonomous robotic grasping[J].Robotics and Autonomous Systems,2012,60(3):396-410.
[5] R S Johansson,J R Flanagan.Coding and use of tactile signals from the fingertips in object manipulation tasks[J].Nature Reviews Neuroscience,2009,10(5):345-359.
[6] Taro Takahashi,Toshimitsu Tsuboi,Takeo Kishida,et al.Adaptive grasping by multi fingered hand with tactile sensor based on robust force and position control[C]//Proceedings of IEEE International Conference on Robotics and Automation,Pasadena:Institute of Electrical and Electronics Engineers Inc,2008:264-271.
[7] Shouhei Shirafuji,Koh Hosoda.Detection and prevention of slip using sensors with different properties embedded in elastic artificial skin on the basis of previous experience[J].Robotics and Autonomous Systems,2014,62(1):46-52.
[8] Van Anh Ho,Dzung Viet Dao,Susumu Sugiyama,et al.Development and analysis of a sliding tactile soft fingertip embedded with a microforce/moment sensor[J].IEEE Transactions on Robotics,2011,27(3):411-424.
[9] Masahiro Ohka,Jumpei Takta,Hiroaki Kobayashi,et al.A robotic finger equipped with an optical three-axis tactile sensor[J].Japan Society of Mechanical Enginears,2008,74(4):859-866.
Design and performance test of PVDF film-type slide sensor
XU Yu-yun1,XU De-zhang1,2∗
(1.College of Mechanical and Automotive Engineering,Anhui Polytechnic University,Wuhu 241000,China; 2.Wuhu Anpu Technology Research Institute Co.Ltd.,Wuhu,241007,China)
Abstract:Flexible material PVDF(piezoelectric film)is selected as a sensor sensitive element,sensitive element array is constructed based on PVDF piezoelectric principle.The contact surface normal face and two tangential forces are calculated from the output signal of the sensitive cell array.Then,the friction coefficient is calculated to determine the slip state between the finger and the target according to the characteristics of friction coefficient in different slip state.The slip sensor sample and the experimental device are made to fully verify the feasibility of the program,and the experimental results show that the sensor reliably detects the slip state between the finger and the target.
Key words:PVDF;slippery sensing;Friction coefficient
中图分类号:TP212.1
文献标识码:A
收稿日期:2015-11-12
基金项目:国家自然科学基金资助项目(51175001)
作者简介:许玉云(1993-),女,安徽合肥人,硕士研究生.
通讯作者:许德章(1964-),男,安徽芜湖人,教授,博士.
